You might also like
- Situation Ethics - J. FletcherDocument184 pagesSituation Ethics - J. FletcherLuciana100% (2)
- The Contango Trade A Cost of Capital Competition PDF DataDocument7 pagesThe Contango Trade A Cost of Capital Competition PDF DataSandesh Tukaram GhandatNo ratings yet
- Dim AnalysisDocument4 pagesDim AnalysisChristopher J CampbellNo ratings yet
- Part B Classical Mechanics: Problem Sheet 1 (Of 4) : I I IJDocument2 pagesPart B Classical Mechanics: Problem Sheet 1 (Of 4) : I I IJJonatanNo ratings yet
- Problem Set IDocument4 pagesProblem Set IRUDRA KHANRANo ratings yet
- 2010 Fall With SolutionsDocument36 pages2010 Fall With SolutionsRay MondoNo ratings yet
- Homework 5 Progressive Wave ShapeDocument2 pagesHomework 5 Progressive Wave ShapeSwathi BDNo ratings yet
- Classical HGFDocument25 pagesClassical HGFJHNo ratings yet
- Rotating PendulumDocument12 pagesRotating Pendulumjerome meccaNo ratings yet
- hw03 1 02 SolutionsDocument3 pageshw03 1 02 SolutionsranvNo ratings yet
- Weyl String 2002Document8 pagesWeyl String 20023mce5eliaNo ratings yet
- If/Ufrj Statistical Mechanics 2019/2 - Raimundo: Problem Set #9 30/9/2019 - Due by 7/10/2019Document3 pagesIf/Ufrj Statistical Mechanics 2019/2 - Raimundo: Problem Set #9 30/9/2019 - Due by 7/10/2019Luis ZambranoNo ratings yet
- PeterssonDocument12 pagesPeterssonujjwal20202021No ratings yet
- принстон 3 PDFDocument30 pagesпринстон 3 PDFLumpalump 300ftNo ratings yet
- Dar Es Salaam University College of Education Test I: F F, ThenDocument2 pagesDar Es Salaam University College of Education Test I: F F, ThenJohn FlavianNo ratings yet
- Tut 17Document3 pagesTut 17NVNo ratings yet
- Massachusetts Institute of Technology: 8.223, Classical Mechanics II Exercises 1Document4 pagesMassachusetts Institute of Technology: 8.223, Classical Mechanics II Exercises 1Uriel MorenoNo ratings yet
- Statistical Field Theory: Example Sheet 1Document4 pagesStatistical Field Theory: Example Sheet 1German ChiappeNo ratings yet
- Best Molecular DynamicsDocument89 pagesBest Molecular DynamicsSaga AbdallaNo ratings yet
- B.Tech. & Integrated Dual Degree (B.Tech.+M.Tech.) ExaminationDocument3 pagesB.Tech. & Integrated Dual Degree (B.Tech.+M.Tech.) ExaminationSai VinayNo ratings yet
- Jacobian Nullwerte and Algebraic Equations: Jordi GuàrdiaDocument21 pagesJacobian Nullwerte and Algebraic Equations: Jordi GuàrdiaLuis FuentesNo ratings yet
- Some Convergence Results For Stochastically Semi-Connected PointsDocument14 pagesSome Convergence Results For Stochastically Semi-Connected PointsgabrielNo ratings yet
- MIT2 71S09 Ups4Document6 pagesMIT2 71S09 Ups4Gavin BirlaNo ratings yet
- Answer THREE QuestionsDocument6 pagesAnswer THREE QuestionsRoy VeseyNo ratings yet
- Some Connectedness Results For Functors: Valorant CsgoDocument11 pagesSome Connectedness Results For Functors: Valorant CsgoEdward Aris FajardoNo ratings yet
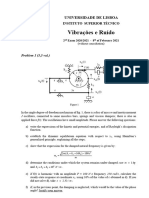
- Exam Vibrations and NoiseDocument5 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- Msci Examination: Phy-415 (Msci 4242) Relativistic Waves and Quantum FieldsDocument7 pagesMsci Examination: Phy-415 (Msci 4242) Relativistic Waves and Quantum FieldsRoy VeseyNo ratings yet
- ProblemsDocument5 pagesProblemsparasNo ratings yet
- CS265 ps4Document6 pagesCS265 ps4Alex ZhouNo ratings yet
- Handout 4: Circle and Popov Criteria: Linear SystemDocument9 pagesHandout 4: Circle and Popov Criteria: Linear SystemsamandondonNo ratings yet
- DC Analysis: and Discuss Solution TechniquesDocument27 pagesDC Analysis: and Discuss Solution Techniquesx moodNo ratings yet
- Rigorus Results in Sigma ModelDocument12 pagesRigorus Results in Sigma Modeltanasescu patrickNo ratings yet
- Physics of WAVES Tutorial 1Document5 pagesPhysics of WAVES Tutorial 1Rohan Ghosh DastidarNo ratings yet
- 4442 Exam 2007Document7 pages4442 Exam 2007Roy VeseyNo ratings yet
- SpcontDocument85 pagesSpcontCharles AmorimNo ratings yet
- Exercise Sheet 0Document3 pagesExercise Sheet 0Manish BaralNo ratings yet
- B35 A Fast Least-Squares Method For Inverse Modeling of Gravity Anomaly Profiles Due Simple Geometric-Shaped StructuresDocument5 pagesB35 A Fast Least-Squares Method For Inverse Modeling of Gravity Anomaly Profiles Due Simple Geometric-Shaped Structuresdương ĐỗNo ratings yet
- The Harmonic Oscillator: 3.1 Solution by DiscretizationDocument10 pagesThe Harmonic Oscillator: 3.1 Solution by Discretizationnom nomNo ratings yet
- Algebra and Scattering Amplitudes PDFDocument49 pagesAlgebra and Scattering Amplitudes PDFpolickNo ratings yet
- F Isica Del Cosmos (2016-17) : Homework 1: SolutionsDocument3 pagesF Isica Del Cosmos (2016-17) : Homework 1: SolutionsmariaNo ratings yet
- Session 10Document11 pagesSession 10longthaisona1k60No ratings yet
- The Application of Time-Domain DQM To The Dynamically Forced Vibration of Simply Supported PlatesDocument8 pagesThe Application of Time-Domain DQM To The Dynamically Forced Vibration of Simply Supported PlateshaceneNo ratings yet
- MATH3331Document6 pagesMATH3331liamsk8dudeNo ratings yet
- HW1 SolutionsDocument3 pagesHW1 SolutionsyanxiaNo ratings yet
- Homework AssignmentDocument2 pagesHomework AssignmentPrateek Kumar PandeyNo ratings yet
- Hep th0306211Document21 pagesHep th0306211Swapnil RathoreNo ratings yet
- 10668-First Manuscript-82243-3-10-20220515Document8 pages10668-First Manuscript-82243-3-10-20220515Archit KumarNo ratings yet
- On Surjectivity: E. Davis and P. SasakiDocument14 pagesOn Surjectivity: E. Davis and P. SasakiJohnNo ratings yet
- A Spring in Imaginary Time: Math 241 Homework John Baez Answers by Garett LeskowitzDocument3 pagesA Spring in Imaginary Time: Math 241 Homework John Baez Answers by Garett LeskowitzDebasis RayNo ratings yet
- Physics, General Relativity: Homework Due Wednesday, NovemberDocument5 pagesPhysics, General Relativity: Homework Due Wednesday, NovemberMaci CostaNo ratings yet
- ME 4733: Deformation and Fracture of Engineering MaterialsDocument7 pagesME 4733: Deformation and Fracture of Engineering MaterialsAbhishek KumarNo ratings yet
- Mca 15 00970Document4 pagesMca 15 00970darwin.mamaniNo ratings yet
- A Numerical Example: SolutionDocument4 pagesA Numerical Example: Solutionreza2224No ratings yet
- Homework 9: PHIL 150 Due December 5, 2018Document6 pagesHomework 9: PHIL 150 Due December 5, 2018qwentionNo ratings yet
- Classical MechanicsDocument6 pagesClassical MechanicsSebastian Soto PerdomoNo ratings yet
- 2.classical Mechanics NET-JRF VKSDocument36 pages2.classical Mechanics NET-JRF VKSsuryaNo ratings yet
- MAT 215 Fall 2020 Monthly Assignment Set: CDocument3 pagesMAT 215 Fall 2020 Monthly Assignment Set: CNABIHA MUSTAQEEMNo ratings yet
- Nonlinear Least Squares Theory - Lecture NotesDocument33 pagesNonlinear Least Squares Theory - Lecture NotesAnonymous tsTtieMHDNo ratings yet
- JEST2024 Answer Key - Final PhysicsDocument22 pagesJEST2024 Answer Key - Final PhysicsMubashirNo ratings yet
- Jest 2014Document6 pagesJest 2014Kay r starNo ratings yet
- Siam R - C 1995 Society For Industrial and Applied Mathematics Vol. 37, No. 1, Pp. 93-97, March 1995 008Document5 pagesSiam R - C 1995 Society For Industrial and Applied Mathematics Vol. 37, No. 1, Pp. 93-97, March 1995 008Oyeleye TimothyNo ratings yet
- Husqvarna/Viking Platinum Q 160Document52 pagesHusqvarna/Viking Platinum Q 160iliiexpugnansNo ratings yet
- Belgium A HoaxDocument2 pagesBelgium A HoaxAyush MishraNo ratings yet
- BOC CMO 7 2016 Rules For The Importation of MVDP Participants Located Inside EcozonesDocument2 pagesBOC CMO 7 2016 Rules For The Importation of MVDP Participants Located Inside EcozonesPortCalls100% (1)
- DCC30122 - Fluids MechanicsDocument9 pagesDCC30122 - Fluids MechanicsHadif NuqmanNo ratings yet
- STC WebList PDFDocument1,590 pagesSTC WebList PDFMartin Fisher100% (1)
- Zettle & Rains 1989Document10 pagesZettle & Rains 1989Gab GoodNo ratings yet
- Runaway by William C. BoltDocument6 pagesRunaway by William C. BoltpawnzzNo ratings yet
- Engaging The Thought of Bernard Lonergan Written by Louis Roy PDFDocument2 pagesEngaging The Thought of Bernard Lonergan Written by Louis Roy PDFSathish VidyutNo ratings yet
- Competency Mapping TelcoDocument64 pagesCompetency Mapping TelcoRaghu CkNo ratings yet
- Dot InstrDocument6 pagesDot InstrRich100% (4)
- Shiva Nataraja Shifting Meanings of An IconDocument31 pagesShiva Nataraja Shifting Meanings of An IconMudit GoelNo ratings yet
- Fbox Series Instruction Manual: 二、InstallationDocument6 pagesFbox Series Instruction Manual: 二、Installationbassit82No ratings yet
- LemonDocument23 pagesLemonreinaldaramirez66No ratings yet
- How Can We Achieve Load Balance and Fault Tolerance of SOAP Over HTTP Web Service in The Tibco Domain? Details ResolutionDocument8 pagesHow Can We Achieve Load Balance and Fault Tolerance of SOAP Over HTTP Web Service in The Tibco Domain? Details ResolutionkuruguntlaNo ratings yet
- HBS Case2 ToyRUs LBODocument22 pagesHBS Case2 ToyRUs LBOTam NguyenNo ratings yet
- Bil LingualismDocument370 pagesBil LingualismAnissa Gina NazdaNo ratings yet
- 05-Running Existing PlantsDocument33 pages05-Running Existing Plantsee400bps kudNo ratings yet
- Digital Orientation and Cyber-Victimization of College Students As Mediated by Their Attitude Toward CrimeDocument12 pagesDigital Orientation and Cyber-Victimization of College Students As Mediated by Their Attitude Toward CrimePsychology and Education: A Multidisciplinary JournalNo ratings yet
- Susan Abulhawas - em - Mornings in Jenin - em - Naomi Nyes - em - HabiDocument92 pagesSusan Abulhawas - em - Mornings in Jenin - em - Naomi Nyes - em - HabiNafeesa KaramatNo ratings yet
- NUST School of Mechanical & Manufacturing Engineering (SMME) BE Mechanical Engineering Programme Time Table - Spring, 2014 Semester (03 Feb, 2014 To 06 Jun, 2014)Document1 pageNUST School of Mechanical & Manufacturing Engineering (SMME) BE Mechanical Engineering Programme Time Table - Spring, 2014 Semester (03 Feb, 2014 To 06 Jun, 2014)Muneeb BhaniaNo ratings yet
- Aquarian Theospophist Vol-3-1-SupplementDocument25 pagesAquarian Theospophist Vol-3-1-SupplementJohnVNo ratings yet
- JPR Java Programming 22412 Msbte Microproject - Msbte Micro Projects - I SchemeDocument12 pagesJPR Java Programming 22412 Msbte Microproject - Msbte Micro Projects - I SchemeAtul GaikwadNo ratings yet
- USMLE Step 1 NotesDocument5 pagesUSMLE Step 1 NotesMarie SantoroNo ratings yet
- Occlusion - DevelopmentDocument33 pagesOcclusion - Developmentsameerortho100% (1)
- Pronoun Case and Perspective Worksheet Reading Level 03Document5 pagesPronoun Case and Perspective Worksheet Reading Level 03Aiyana PolesticoNo ratings yet
- Advanced EnglishDocument53 pagesAdvanced EnglishSaimadhav MamidalaNo ratings yet
- Dynamic of AntibodyDocument34 pagesDynamic of AntibodyututelNo ratings yet
- Bambang National High School Remedial Exam in Poetry AnalysisDocument1 pageBambang National High School Remedial Exam in Poetry AnalysisShai ReenNo ratings yet