You might also like
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Compensation techniques based on reactive power conservationDocument9 pagesCompensation techniques based on reactive power conservationANANDNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Vibration: Fundamentals and PracticeDocument19 pagesVibration: Fundamentals and PracticeMuket AgmasNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- 262 HerreraDocument6 pages262 HerreraAhmed Abd AlRahmanNo ratings yet
- Thermodynamic Cycles With Active Matter: PHYSICAL REVIEW E 102, 010101 (R) (2020)Document6 pagesThermodynamic Cycles With Active Matter: PHYSICAL REVIEW E 102, 010101 (R) (2020)Franck PatruNo ratings yet
- Compensation of Load Unbalance, Reactive Power and Harmonic Distortion by Cooperative Operation of Distributed CompensatorsDocument10 pagesCompensation of Load Unbalance, Reactive Power and Harmonic Distortion by Cooperative Operation of Distributed CompensatorsJandfor Tansfg ErrottNo ratings yet
- Evaluation of Reactive Power Meters in The Presence of High Harmonic DistortionDocument7 pagesEvaluation of Reactive Power Meters in The Presence of High Harmonic DistortionKostya TytelmaierNo ratings yet
- Generation Control in Small Isolated Power Systems: M. Milošević, Student Member IEEE, G. Andersson, Fellow IEEEDocument6 pagesGeneration Control in Small Isolated Power Systems: M. Milošević, Student Member IEEE, G. Andersson, Fellow IEEE198227No ratings yet
- ME1402 Mechatronics Unit - 3Document71 pagesME1402 Mechatronics Unit - 3Sandheep Radhakrishnan100% (7)
- 10 23919@acc 2018 8431894Document6 pages10 23919@acc 2018 8431894mda mpsNo ratings yet
- Conservative Power Theory CPTDocument115 pagesConservative Power Theory CPTAhmed58seribegawanNo ratings yet
- Optimal Location of FACTS To Optimize Power System SecurityDocument8 pagesOptimal Location of FACTS To Optimize Power System SecurityEdu FzNo ratings yet
- Small Signal Modeling and Analysis of Synchronverters: Zhou Wei, Chen Jie and Gong ChunyingDocument5 pagesSmall Signal Modeling and Analysis of Synchronverters: Zhou Wei, Chen Jie and Gong ChunyingEnimien AymenNo ratings yet
- Turbulence Modelling SPRING 2011: Mean Fluid Variables in A Turbulent FlowDocument17 pagesTurbulence Modelling SPRING 2011: Mean Fluid Variables in A Turbulent FlowAnil Kumar MattaNo ratings yet
- Willems2007 POT SeparaçãoDocument8 pagesWillems2007 POT Separaçãoconcurso5 eletricaufmsNo ratings yet
- Dielectric Relaxation Functions and Models - Gross - 1990Document6 pagesDielectric Relaxation Functions and Models - Gross - 1990AP SinghNo ratings yet
- Control of Energy Storage Devices: Yoash Levron Juri BelikovDocument16 pagesControl of Energy Storage Devices: Yoash Levron Juri BelikovВадим МудрикNo ratings yet
- The Research On Hybrid Shunt ActiveDocument4 pagesThe Research On Hybrid Shunt Activerakheep123No ratings yet
- Lecture-6-Basic System ModelsDocument23 pagesLecture-6-Basic System Modelsseifu hailemariamNo ratings yet
- Modeling and Simulation of A Series Resonant InverterDocument6 pagesModeling and Simulation of A Series Resonant InverterkaaisNo ratings yet
- AlgorithmDocument9 pagesAlgorithmAlberto JimenezNo ratings yet
- SMIBDocument7 pagesSMIBLê Trung DũngNo ratings yet
- Power Quality Improvements Through Power Electronic Interfaced Distributed GenerationDocument7 pagesPower Quality Improvements Through Power Electronic Interfaced Distributed GenerationNirmal mehtaNo ratings yet
- Distributed Cooperative Load Sharing in Parallel DC-DC ConvertersDocument6 pagesDistributed Cooperative Load Sharing in Parallel DC-DC ConvertersNawara NawaraNo ratings yet
- Robust Global Stabilization of The DC-DC Boost Converter Via Hybrid Control - T. Theunisse Et Al. - Journal Article (2015)Document14 pagesRobust Global Stabilization of The DC-DC Boost Converter Via Hybrid Control - T. Theunisse Et Al. - Journal Article (2015)Aaron CrucesNo ratings yet
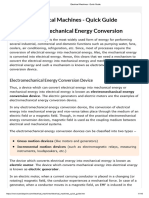
- Electrical Machines - Quick GuideDocument116 pagesElectrical Machines - Quick Guideb14.00010.20No ratings yet
- Dynamic Stability and Optimal Control in Power NetworksDocument6 pagesDynamic Stability and Optimal Control in Power NetworksnguyenpsNo ratings yet
- Generalized Princilpe of DynamicsDocument36 pagesGeneralized Princilpe of DynamicsshreedharkolekarNo ratings yet
- Analysis of Waveform Distortion and Absorbed Powers in Switching Power SuppliesDocument6 pagesAnalysis of Waveform Distortion and Absorbed Powers in Switching Power SuppliesRaj ChavanNo ratings yet
- Inverter VAR Control For Distribution Systems With RenewablesDocument6 pagesInverter VAR Control For Distribution Systems With RenewablesMasoud FarivarNo ratings yet
- Fast Distributed Reactive Power Control For Voltage Regulation in Distribution NetworksDocument4 pagesFast Distributed Reactive Power Control For Voltage Regulation in Distribution NetworksRianti TampubolonNo ratings yet
- Calculation The Dissipation Factor of PoDocument5 pagesCalculation The Dissipation Factor of PomagdyNo ratings yet
- Michael J. McCourt, P. J. Antsaklis 2010 Stability of Networked Passive Switched SystemsDocument6 pagesMichael J. McCourt, P. J. Antsaklis 2010 Stability of Networked Passive Switched SystemsFelix GamarraNo ratings yet
- Sect 2 Energy and PowerDocument20 pagesSect 2 Energy and Powerkushil1998No ratings yet
- Load Recognition For Different Loads With The Same Real Power and Reactive Power in A Nilm SystemDocument6 pagesLoad Recognition For Different Loads With The Same Real Power and Reactive Power in A Nilm SystemMuhammad SyukriNo ratings yet
- Single-Phase Shunt Active Filter With Digital ControlDocument6 pagesSingle-Phase Shunt Active Filter With Digital ControlIonut DraganNo ratings yet
- J Sysconle 2013 05 003Document9 pagesJ Sysconle 2013 05 003Subrata MajumdarNo ratings yet
- Chapter 6Document7 pagesChapter 6merrNo ratings yet
- mendalek2003Document7 pagesmendalek2003kuetecedric0No ratings yet
- Distributed Receding Horizon Control of Coupled Nonlinear SystemsDocument7 pagesDistributed Receding Horizon Control of Coupled Nonlinear SystemsBaba JeeNo ratings yet
- Self-Organized Criticality and Cascading Failures in The Topological Model of Power Grids: A Case StudyDocument6 pagesSelf-Organized Criticality and Cascading Failures in The Topological Model of Power Grids: A Case Studymayalasan1No ratings yet
- Comparative, PQ, DQDocument8 pagesComparative, PQ, DQDaiana Correia de LucenaNo ratings yet
- Network 111Document211 pagesNetwork 111ERMIAS AmanuelNo ratings yet
- Alexandra Pătraşcu, Phd. Student, Prof. Eng. Mihaela Popescu, PHD, Vlad Suru, PHDDocument4 pagesAlexandra Pătraşcu, Phd. Student, Prof. Eng. Mihaela Popescu, PHD, Vlad Suru, PHDEdsonNo ratings yet
- Losses Epsr 1998Document6 pagesLosses Epsr 1998Gabriel AlvarengaNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument23 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For Scientistsmaamounalnhar22No ratings yet
- Instantaneus Power TheoromDocument5 pagesInstantaneus Power TheoromAlok Bikash SadangiNo ratings yet
- Mechanical SystemsDocument43 pagesMechanical SystemsRajendar PonagantiNo ratings yet
- Goldstein Classical Mechanics Notes: 1 Chapter 1: Elementary PrinciplesDocument149 pagesGoldstein Classical Mechanics Notes: 1 Chapter 1: Elementary PrinciplesPavan KumarNo ratings yet
- Convention Paper: Simulation of An Analog Circuit of A Wah Pedal: A Port-Hamiltonian ApproachDocument9 pagesConvention Paper: Simulation of An Analog Circuit of A Wah Pedal: A Port-Hamiltonian ApproachMafeCastro1998No ratings yet
- Unit 2. Quantifying Reaction Progress: Reaction Progress Variables Give Some Measure of How Much Reaction Has Taken PlaceDocument5 pagesUnit 2. Quantifying Reaction Progress: Reaction Progress Variables Give Some Measure of How Much Reaction Has Taken PlaceChenxu LiuNo ratings yet
- Lagrange Equations: Use Kinetic and Potential Energy To Solve For Motion!Document32 pagesLagrange Equations: Use Kinetic and Potential Energy To Solve For Motion!Ribal KhreisNo ratings yet
- Nonlinear VEH Review Jia r2Document21 pagesNonlinear VEH Review Jia r2ranim najibNo ratings yet
- Circuits and Systems Expositions Analysis of Linear Networks with Inconsistent Initial ConditionsDocument10 pagesCircuits and Systems Expositions Analysis of Linear Networks with Inconsistent Initial ConditionsKarthik V KalyaniNo ratings yet
- Final 91-ANEWTHEORYDocument9 pagesFinal 91-ANEWTHEORYStefano BarbieriNo ratings yet
- Rasheef SpinDocument7 pagesRasheef SpinMohamed SanoosNo ratings yet
- Fuzzy Control of DC-DC Converters: Stability AnalysisDocument4 pagesFuzzy Control of DC-DC Converters: Stability Analysisjoanelias45No ratings yet
- Simulation, Stability of The H-Bridge Low Power Dissipation For PhotovoltaicDocument8 pagesSimulation, Stability of The H-Bridge Low Power Dissipation For PhotovoltaicVinsen Teubun LetsoinNo ratings yet
- Power Electronics SimulationDocument8 pagesPower Electronics Simulationjay panchalNo ratings yet
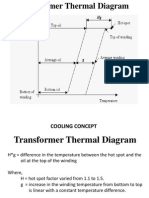
- CoolingDocument13 pagesCoolingjay panchalNo ratings yet
- CoolingDocument13 pagesCoolingjay panchalNo ratings yet
- Power Transformers Are Commonly Cooled With Detachable Panel RadiatorsDocument9 pagesPower Transformers Are Commonly Cooled With Detachable Panel Radiatorsjay panchalNo ratings yet
- Project Meeting ReportDocument1 pageProject Meeting Reportjay panchalNo ratings yet
- SwitchgearDocument1 pageSwitchgearjay panchalNo ratings yet
- OutputDocument1 pageOutputjay panchalNo ratings yet
- PSC AdDocument1 pagePSC Adjay panchalNo ratings yet
- DC Motor SimulinkDocument8 pagesDC Motor SimulinkMELVINNo ratings yet
- Training Gtu Nitttr 10Document1 pageTraining Gtu Nitttr 10jay panchalNo ratings yet
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeFrom EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeRating: 4 out of 5 stars4/5 (130)
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Industrial Waste Treatment HandbookFrom EverandIndustrial Waste Treatment HandbookRating: 5 out of 5 stars5/5 (1)
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- Biogas Production: Pretreatment Methods in Anaerobic DigestionFrom EverandBiogas Production: Pretreatment Methods in Anaerobic DigestionNo ratings yet
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Grid-Scale Energy Storage Systems and ApplicationsFrom EverandGrid-Scale Energy Storage Systems and ApplicationsFu-Bao WuNo ratings yet
- Carbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersFrom EverandCarbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersRating: 4.5 out of 5 stars4.5/5 (2)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Practical Methods for Analysis and Design of HV Installation Grounding SystemsFrom EverandPractical Methods for Analysis and Design of HV Installation Grounding SystemsRating: 4.5 out of 5 stars4.5/5 (2)
- The Way Home: Tales from a life without technologyFrom EverandThe Way Home: Tales from a life without technologyRating: 4 out of 5 stars4/5 (45)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet