You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (843)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- HYVA-Crane-2013 High Res AttachmentDocument53 pagesHYVA-Crane-2013 High Res AttachmentBalaji RathinavelNo ratings yet
- How To - Open A Specific Port in CyberoamDocument3 pagesHow To - Open A Specific Port in CyberoamdenisNo ratings yet
- Power Project BoardDocument1 pagePower Project BoardHitesh MehtaNo ratings yet
- Instrument Mechanic 146180122Document50 pagesInstrument Mechanic 146180122Hitesh MehtaNo ratings yet
- Three Phase Measurement SystemDocument2 pagesThree Phase Measurement SystemHitesh MehtaNo ratings yet
- AlstomDocument34 pagesAlstomHitesh MehtaNo ratings yet
- Kulliyyah of EngineeringDocument11 pagesKulliyyah of EngineeringHitesh MehtaNo ratings yet
- Vickers Servo ValveDocument28 pagesVickers Servo ValveHitesh MehtaNo ratings yet
- Control Valave TrainerDocument5 pagesControl Valave TrainerHitesh MehtaNo ratings yet
- Class e Resonant InverterDocument6 pagesClass e Resonant InverterHitesh MehtaNo ratings yet
- AD9852 DDS ModuleDocument10 pagesAD9852 DDS ModuleHitesh MehtaNo ratings yet
- Hall BookDocument126 pagesHall BookbanguyenbkNo ratings yet
- A Technical Guide To Smps AdaptersDocument28 pagesA Technical Guide To Smps AdaptersHitesh MehtaNo ratings yet
- JT 121 PP PDFDocument2 pagesJT 121 PP PDFRāĦul LuĦārNo ratings yet
- Friction and Lubrication in Medieval Europe The Emergence of Olive Oil As A Superior AgentDocument23 pagesFriction and Lubrication in Medieval Europe The Emergence of Olive Oil As A Superior AgentstankevichijusNo ratings yet
- شرح المحول الكهربيDocument88 pagesشرح المحول الكهربيAffify Afify100% (1)
- Math 3 Quarter 4 Preliminary Pages PDFDocument6 pagesMath 3 Quarter 4 Preliminary Pages PDFMhar Colipat ChavNo ratings yet
- SGS Conformity Enquiry Form (Application Form)Document3 pagesSGS Conformity Enquiry Form (Application Form)Hakeym LarhNo ratings yet
- Master RFI Register - NeoDocument41 pagesMaster RFI Register - NeoRajeev KumarNo ratings yet
- 694Document13 pages694Naresh MudaniNo ratings yet
- Motorola Accessoires PDFDocument4 pagesMotorola Accessoires PDFPopovici AdrianNo ratings yet
- Marketing NotesDocument5 pagesMarketing NotesfaisalNo ratings yet
- Department of Education: CI Team Accomplishment ReportDocument2 pagesDepartment of Education: CI Team Accomplishment ReportRhea Diaz-BadonNo ratings yet
- Lincoln - General Lubrication ProductsDocument103 pagesLincoln - General Lubrication ProductsRebecca Hartman100% (1)
- AA - IPB - Spare PartsDocument28 pagesAA - IPB - Spare PartsKaha ChogovadzeNo ratings yet
- Topic 5c - Cable Ampacity & SizingDocument19 pagesTopic 5c - Cable Ampacity & SizingAlla Naveen KumarNo ratings yet
- Antenna ServoDocument3 pagesAntenna ServoamarnathavulaNo ratings yet
- Ds181 Artix 7 Data SheetDocument63 pagesDs181 Artix 7 Data Sheetabhi_jNo ratings yet
- Fault Analysis of Three Phase Alternator Sequence Impedance: Apparatus RequiredDocument9 pagesFault Analysis of Three Phase Alternator Sequence Impedance: Apparatus RequiredMohan KrishnaNo ratings yet
- 6 DMDocument3 pages6 DMOlivier ORMANNo ratings yet
- Inventory Management Technique in ConstructionDocument6 pagesInventory Management Technique in ConstructionMohamed Wayrah0% (1)
- BS 1600 (1991)Document13 pagesBS 1600 (1991)victor_altamirano_28No ratings yet
- Digital Control of Dynamic Systems (1998)Document8 pagesDigital Control of Dynamic Systems (1998)NgọcBảoNo ratings yet
- Pionjar 120 Manual de OperacionDocument76 pagesPionjar 120 Manual de OperacionMi MoniNo ratings yet
- Introduction To EME - AB INITIODocument32 pagesIntroduction To EME - AB INITIONamrata Mukherjee0% (1)
- Isolated Footing Design PDFDocument45 pagesIsolated Footing Design PDFChau Suktana Enling0% (1)
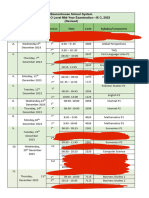
- Grade IX Mid Term Examination Datesheet 2023 RevisedDocument2 pagesGrade IX Mid Term Examination Datesheet 2023 Revisedraamir2010No ratings yet
- The Milan News-Leader Front PageDocument1 pageThe Milan News-Leader Front PageMichelle RogersNo ratings yet
- CAIRO Probs and SolutionsDocument2 pagesCAIRO Probs and Solutions3alliumcourt100% (1)
- Modo de Uso Centrifuga UniversalDocument2 pagesModo de Uso Centrifuga UniversalJocelyn GallardoNo ratings yet
- ApspscDocument1 pageApspscMadhu MadhavaNo ratings yet