You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Solution Manual of The 80×86 IBM PC and Compatible Computers - 4th EditionDocument126 pagesSolution Manual of The 80×86 IBM PC and Compatible Computers - 4th EditionAwais Salman Qazi60% (5)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Error MsgsDocument162 pagesError Msgsapi-19417993No ratings yet
- The International University of Scholars: Department of Computer Science & EngineeringDocument1 pageThe International University of Scholars: Department of Computer Science & EngineeringGK KaderyeNo ratings yet
- ARM® Developer SuiteDocument276 pagesARM® Developer Suiteapi-19417993No ratings yet
- Getting Started With AndroidDocument36 pagesGetting Started With AndroidRaj SrivastavaNo ratings yet
- Linux 2.6 For Embedded Systems-: Closing in On Real TimeDocument4 pagesLinux 2.6 For Embedded Systems-: Closing in On Real Timeapi-19417993100% (1)
- EndianDocument22 pagesEndianlavan1567No ratings yet
- Complete Computer AcronymsDocument161 pagesComplete Computer Acronymsapi-19417993No ratings yet
- Linux As An Embedded Operating System: Embedded Linux For The Dil/Netpc Dnp/1486-3VDocument10 pagesLinux As An Embedded Operating System: Embedded Linux For The Dil/Netpc Dnp/1486-3Vapi-19417993No ratings yet
- ADS Errors and WarningsDocument75 pagesADS Errors and Warningsapi-19417993No ratings yet
- Life Time CalenderDocument1 pageLife Time Calenderapi-19417993No ratings yet
- HP C Reference ManualDocument324 pagesHP C Reference ManualUtsav SahaNo ratings yet
- ARMv6 ArchitectureDocument15 pagesARMv6 ArchitecturebengaltigerNo ratings yet
- Input and Output Functions in CDocument10 pagesInput and Output Functions in Capi-19417993No ratings yet
- Mobile - Codes - One Sheeter - UpdatedDocument2 pagesMobile - Codes - One Sheeter - Updatedapi-19417993No ratings yet
- Introduction To Arm ArchitectureDocument10 pagesIntroduction To Arm ArchitectureVesper ZhaoNo ratings yet
- Life CalculationsDocument1 pageLife Calculationsapi-19417993No ratings yet
- Magic Spreadsheet: Choose A TrickDocument8 pagesMagic Spreadsheet: Choose A Trickapi-19417993No ratings yet
- Digital Video PrimerDocument2 pagesDigital Video Primerapi-19417993No ratings yet
- Budget Planner For EsakalDocument7 pagesBudget Planner For Esakalapi-19417993No ratings yet
- ClockDocument6 pagesClockapi-19417993No ratings yet
- Best Websites List316Document51 pagesBest Websites List316api-3813991No ratings yet
- Complete Computer AcronymsDocument161 pagesComplete Computer Acronymsapi-19417993No ratings yet
- Biostar H55 HD Rev. 6.4 (Ih55a-Mhs)Document38 pagesBiostar H55 HD Rev. 6.4 (Ih55a-Mhs)Job GarciaNo ratings yet
- Introduc) On: Lecture 1: Evolution of Computer System Lecture 1: Evolution of Computer SystemDocument19 pagesIntroduc) On: Lecture 1: Evolution of Computer System Lecture 1: Evolution of Computer Systemshaz4194No ratings yet
- Computer Organization and Architecture: Storage TechnologiesDocument36 pagesComputer Organization and Architecture: Storage TechnologiesJaved bajwaNo ratings yet
- Rns Institute of Technology: Text BooksDocument52 pagesRns Institute of Technology: Text Booksanu radhaNo ratings yet
- Microchip ATSAMD21G18A AUT DatasheetDocument972 pagesMicrochip ATSAMD21G18A AUT DatasheetmicNo ratings yet
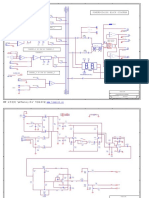
- Phonic Powerpod 615 620 SchematicDocument16 pagesPhonic Powerpod 615 620 Schematicelectronicalider0% (1)
- Duhamel's PrincipleDocument14 pagesDuhamel's Principlejoel24348584No ratings yet
- COA GTU Study Material Presentations Unit-2 15012020080815AMDocument65 pagesCOA GTU Study Material Presentations Unit-2 15012020080815AMJanvi PatelNo ratings yet
- 29 - Instruction Cycle and Sub-CycleDocument4 pages29 - Instruction Cycle and Sub-Cyclejohn100% (1)
- Vlsi Ratioed (Pseudo) LogicDocument3 pagesVlsi Ratioed (Pseudo) LogicMasudRana0% (1)
- IntroSoC Lab04Document10 pagesIntroSoC Lab04Ngữ Đào DuyNo ratings yet
- 2 Mips ArchitectureDocument70 pages2 Mips Architecture3sfr3sfrNo ratings yet
- Btech Cs 3 Sem Computer Organization and Architecture rcs302 2020Document2 pagesBtech Cs 3 Sem Computer Organization and Architecture rcs302 2020Vishal Kumar SharmaNo ratings yet
- Microprocessor /microcontroller Based Systems: Dr. Abbas Javed (Abbasjaved@cuilahore - Edu.pk)Document54 pagesMicroprocessor /microcontroller Based Systems: Dr. Abbas Javed (Abbasjaved@cuilahore - Edu.pk)Amna EhtshamNo ratings yet
- Randi Rajput 5. Microprocessor Mod (CPU, & Parts)Document16 pagesRandi Rajput 5. Microprocessor Mod (CPU, & Parts)aliNo ratings yet
- Homework 2 Digital Integrated Circuit Design: N-Channel MOSFET EQUATIONDocument3 pagesHomework 2 Digital Integrated Circuit Design: N-Channel MOSFET EQUATIONKhánh TrầnNo ratings yet
- Unit Iv Coa - PPTDocument99 pagesUnit Iv Coa - PPTfreeid5899No ratings yet
- Stick DiagramsDocument42 pagesStick DiagramsAnonymous BHcPexNo ratings yet
- Chapter 4 - Arithmetric Operation Condition Codes Register (CCR)Document76 pagesChapter 4 - Arithmetric Operation Condition Codes Register (CCR)Shashitharan PonnambalanNo ratings yet
- PassMark Intel Vs AMD CPU Benchmarks - High EndDocument10 pagesPassMark Intel Vs AMD CPU Benchmarks - High EndoasisalfNo ratings yet
- El Arduino Uno Es Una Placa de Microcontrolador de Código Abierto Basado en El Microchip ATmega328P y Desarrollado Por ArduinoDocument8 pagesEl Arduino Uno Es Una Placa de Microcontrolador de Código Abierto Basado en El Microchip ATmega328P y Desarrollado Por Arduinogabriel sandovalNo ratings yet
- 32-Bit Constants: - Most Constants Are Small - For The Occasional 32-Bit Constant Lui RT, ConstantDocument10 pages32-Bit Constants: - Most Constants Are Small - For The Occasional 32-Bit Constant Lui RT, ConstantArvind RameshNo ratings yet
- Dell Latitude 5410 14 Laptop White Papers En-UsDocument2 pagesDell Latitude 5410 14 Laptop White Papers En-UsFábio MaiaNo ratings yet
- Sharp Corporation: Digital Multi Function Copier (Option) : AR-M150/M165/5220 EtcDocument1 pageSharp Corporation: Digital Multi Function Copier (Option) : AR-M150/M165/5220 EtcRadmos InfoNo ratings yet
- CEG 2131 - Fall 2003 - FinalDocument14 pagesCEG 2131 - Fall 2003 - FinalAmin DhouibNo ratings yet
- CSE332 Pipelining Problems&SolutionsDocument4 pagesCSE332 Pipelining Problems&SolutionsTasnim HossainNo ratings yet
- Evolution of Intel Processors PDFDocument2 pagesEvolution of Intel Processors PDFAllison50% (2)
- All Price List Kristal - 14 Juni 2023Document34 pagesAll Price List Kristal - 14 Juni 2023Ragnarok NftNo ratings yet