You might also like
- Joe Project RobotDocument19 pagesJoe Project RobotTiruveedula RishendraNo ratings yet
- Working Principle: 1) System CheckDocument8 pagesWorking Principle: 1) System CheckHans IngoleNo ratings yet
- Line Follower RobotDocument22 pagesLine Follower Robotkawish4uNo ratings yet
- Line Follower RobotDocument16 pagesLine Follower RobotRohit sharmaNo ratings yet
- Line Follower Robot Using 8051 Micro ControllerDocument34 pagesLine Follower Robot Using 8051 Micro Controllerm.abdullah100% (2)
- Cep Micro2 170857Document13 pagesCep Micro2 170857Ramsha MalikNo ratings yet
- 8051 Microcontroller Based Edge Avoiding RobotDocument14 pages8051 Microcontroller Based Edge Avoiding RobotJuthik BVNo ratings yet
- Line Follower RobotDocument16 pagesLine Follower RobotVenkat Munnangi100% (1)
- Autonomic Robot Finds and Transports ObjectDocument26 pagesAutonomic Robot Finds and Transports ObjectZeynal Abidin ŞabaşNo ratings yet
- Line Follower Robot PrototypeDocument4 pagesLine Follower Robot PrototypeArief Setyo NugrohoNo ratings yet
- Project Report: Line Following RobotDocument12 pagesProject Report: Line Following RobotAhsan MuradNo ratings yet
- Line Follower Robot Using ArduinoDocument13 pagesLine Follower Robot Using Arduinolizhi2012No ratings yet
- DC Motor With Encoder Manual (1.1 W)Document7 pagesDC Motor With Encoder Manual (1.1 W)Saad NajibNo ratings yet
- LINE - MAZE SOLVING ROBOTDocument10 pagesLINE - MAZE SOLVING ROBOTtcteh86No ratings yet
- Final Report - EHDcodeDocument13 pagesFinal Report - EHDcodeShreya AgrawalNo ratings yet
- 3.0 Hardware and ApparatusDocument5 pages3.0 Hardware and ApparatusEileen WongNo ratings yet
- Gesture Control Car Using Arduino LilypadDocument17 pagesGesture Control Car Using Arduino LilypadMohammed KhaleelullahNo ratings yet
- Dokumen - Tips Arduino Line Follower RobotDocument10 pagesDokumen - Tips Arduino Line Follower RobotAgung SetyonoNo ratings yet
- Non Programmable Line Follower RobotDocument27 pagesNon Programmable Line Follower RobotAsish Kumar Sharma100% (1)
- IR emitter and IR phototransistor guideDocument6 pagesIR emitter and IR phototransistor guidesrc e-solutionsNo ratings yet
- Arduino four way tracking car kit tutorialDocument26 pagesArduino four way tracking car kit tutorialvadym_kovalenko4166No ratings yet
- Project Number A3743 Autonomous Robot: Project Features: Atmega16 MicrocontrollerDocument5 pagesProject Number A3743 Autonomous Robot: Project Features: Atmega16 Microcontrollergalaxy_hypeNo ratings yet
- Edge Detector and Avoider RobotDocument7 pagesEdge Detector and Avoider RobotharrysinghNo ratings yet
- Obstacle Avoiding RobotDocument17 pagesObstacle Avoiding RobotSmiley Boy Aanand100% (1)
- Components Descriptions 22Document9 pagesComponents Descriptions 22Yogesh KNo ratings yet
- Report FinaleDocument16 pagesReport Finalewtpqk87nxcNo ratings yet
- Obstacle Avoiding RobotDocument17 pagesObstacle Avoiding Robotukavnganesh2002No ratings yet
- Automatic floor cleaning robotDocument5 pagesAutomatic floor cleaning robotArun RajNo ratings yet
- PDF Maze Solver RobotDocument7 pagesPDF Maze Solver RobotVenkat AlluNo ratings yet
- Line Follower Robot Using ArduinoDocument10 pagesLine Follower Robot Using ArduinoPankaj JindalNo ratings yet
- Line Robot FollowerDocument23 pagesLine Robot Followeratul mishra100% (1)
- Obstacle Avoiding RobotDocument17 pagesObstacle Avoiding RobotNishant Kamal93% (15)
- 01 EncoderDocument4 pages01 EncoderAngel ChicchonNo ratings yet
- Line Follower Robot Using ArduinoDocument12 pagesLine Follower Robot Using ArduinoPavithra VNo ratings yet
- Obstacle Avoiding RobotDocument18 pagesObstacle Avoiding RobotAJIN KNo ratings yet
- 2-Way Sound Sensitive Line FollowerDocument13 pages2-Way Sound Sensitive Line FollowerAbhishek DasNo ratings yet
- Ce Lab ProjectDocument15 pagesCe Lab ProjectFahad ChaudharyNo ratings yet
- Final Report On Line Follower RobotDocument44 pagesFinal Report On Line Follower RobotAjay Verma50% (4)
- Automatic Car Parking SystemDocument64 pagesAutomatic Car Parking SystemSebastin AshokNo ratings yet
- Line FollowerDocument13 pagesLine FollowerFarah AzamNo ratings yet
- Automatic Hand Sanitizer Dispenser Using Arduino: Final Year Project OnDocument24 pagesAutomatic Hand Sanitizer Dispenser Using Arduino: Final Year Project OnadhirajbaneNo ratings yet
- Line Follwer Robot Using LM324Document11 pagesLine Follwer Robot Using LM324Ioan DorofteiNo ratings yet
- Obstacle Avoidance RobotDocument9 pagesObstacle Avoidance Robotnagasaikiran ponnapalliNo ratings yet
- Basics of InvertersDocument12 pagesBasics of InvertersTatenda BizureNo ratings yet
- Line Follower RobotDocument29 pagesLine Follower RobotSebastin AshokNo ratings yet
- TachoDocument55 pagesTachoRaja BabuNo ratings yet
- Arduino UnoDocument11 pagesArduino UnoNirav DsouzaNo ratings yet
- Heartbeat Measurement Using FingertipDocument9 pagesHeartbeat Measurement Using FingertipYogesh Tayal100% (1)
- Build a Line-Following Robot with ArduinoDocument5 pagesBuild a Line-Following Robot with Arduinochockalingam athilingam100% (1)
- RoboticsDocument16 pagesRoboticsraunak600250No ratings yet
- Line Follower Robot: Supervisor: Yrd. DoçDocument12 pagesLine Follower Robot: Supervisor: Yrd. DoçManuel Alberto Jaramillo LugoNo ratings yet
- Line Follower ReportDocument23 pagesLine Follower Reportatul mishra88% (8)
- Servo Motor & D.C Motor Interfacing With Atmega32Document33 pagesServo Motor & D.C Motor Interfacing With Atmega32Yash TripathiNo ratings yet
- Heart Rate Measurement From FingertipDocument8 pagesHeart Rate Measurement From FingertipNatasha PillaiNo ratings yet
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDFrom EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Instacion TAL A42Document28 pagesInstacion TAL A42Roberto StepankowskyNo ratings yet
- Siremobil Iso-C: System WartungsprotokollDocument12 pagesSiremobil Iso-C: System WartungsprotokollVlady Lopez CastroNo ratings yet
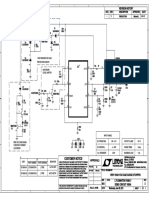
- DC1850ASCHDocument1 pageDC1850ASCHNasirMahmoodNo ratings yet
- Section 12: Student Evaluation and Pre-LabsDocument26 pagesSection 12: Student Evaluation and Pre-Labschrist9088No ratings yet
- Eu Pss AenDocument2 pagesEu Pss AenwajidenggNo ratings yet
- HLB1VHYJHFXXXXbtXpXX PRXFXXXPDocument10 pagesHLB1VHYJHFXXXXbtXpXX PRXFXXXPTauseef AlamNo ratings yet
- Instruction Manual: Command Series® Strategic Loop ControllerDocument178 pagesInstruction Manual: Command Series® Strategic Loop ControllerMartin AmarillaNo ratings yet
- Triangular Patch Antenna 1Document3 pagesTriangular Patch Antenna 1Isha JainNo ratings yet
- DFR PCB Reliability Supply ChainDocument37 pagesDFR PCB Reliability Supply ChainlongNo ratings yet
- Parts Catalog Ricoh mpc3003Document234 pagesParts Catalog Ricoh mpc3003mauro_ferrero_0% (1)
- Eurotherm 6100a PDFDocument2 pagesEurotherm 6100a PDFKenNo ratings yet
- MSP Automatic-Street-Light-Using-LdrDocument16 pagesMSP Automatic-Street-Light-Using-Ldrjigyasa BhardwajNo ratings yet
- Sqlc-110l DaiichiDocument13 pagesSqlc-110l DaiichiDasuki FahmiNo ratings yet
- 1733VGDocument18 pages1733VGTERASAT SANo ratings yet
- TES-P-104.04-R0 Splices and Termination of Power CablesDocument9 pagesTES-P-104.04-R0 Splices and Termination of Power CablesSalmanEjazNo ratings yet
- HC244Document5 pagesHC244Oscorima QNo ratings yet
- CIVIL AVIATION AUTHORITY, BANGLADESH AML PART-66Document189 pagesCIVIL AVIATION AUTHORITY, BANGLADESH AML PART-66iuabdullah02eeeNo ratings yet
- Analog Circuit DesignDocument405 pagesAnalog Circuit DesignSIMETNo ratings yet
- Flexim F704 PDFDocument257 pagesFlexim F704 PDFMarcelo OlivaresNo ratings yet
- 31025882-MA5200F Technical Manual V1.70Document105 pages31025882-MA5200F Technical Manual V1.70SamuelNo ratings yet
- List 2G External Cells in HNIDocument566 pagesList 2G External Cells in HNIdtrtienNo ratings yet
- Introduction To Profibus ProfinetDocument15 pagesIntroduction To Profibus ProfinetsoewinaungNo ratings yet
- Toshiba e 181 Copiers Error Code MessagesDocument15 pagesToshiba e 181 Copiers Error Code MessagesPADMU_123No ratings yet
- Communication Engineering Unit 1 Lecture 1Document22 pagesCommunication Engineering Unit 1 Lecture 1Deepak SinghNo ratings yet
- Determination of Resonant Frequency of A Piezoelectric Ring For Generation of Ultrasonic WavesDocument8 pagesDetermination of Resonant Frequency of A Piezoelectric Ring For Generation of Ultrasonic WavesiisteNo ratings yet
- Fundamentals of Microcontrollers (MCU's) : Hands-On WorkshopDocument23 pagesFundamentals of Microcontrollers (MCU's) : Hands-On WorkshopVIJAYPUTRANo ratings yet
- CatalogueDocument4 pagesCatalogueAmit PalNo ratings yet
- Machining Centers and Turning Centers LectureDocument19 pagesMachining Centers and Turning Centers Lecturepaul loganNo ratings yet