You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Laravel Admin TemplateDocument35 pagesLaravel Admin TemplateLaravel0% (1)
- 3512C Parts ManualDocument0 pages3512C Parts ManualGomez Gallardo Andres100% (1)
- Description Bridges: Descripción de Un PuentesDocument9 pagesDescription Bridges: Descripción de Un PuentesJennifer C RodriguezNo ratings yet
- W P ADocument8 pagesW P ASardar PerdawoodNo ratings yet
- 5110B - L Prod Bulletin (TRJB9047)Document56 pages5110B - L Prod Bulletin (TRJB9047)suwarjitechnic100% (1)
- C - Prog AssDocument29 pagesC - Prog Assgal_farsyNo ratings yet
- Valleylab Force FX - Testing ProcedureDocument18 pagesValleylab Force FX - Testing ProcedureAmmin Dada100% (2)
- Chapter 1 - Intro - Lecture SlideDocument29 pagesChapter 1 - Intro - Lecture Slidesir isaNo ratings yet
- Esrc - Sta. Maria Elementary SchoolDocument104 pagesEsrc - Sta. Maria Elementary SchoolEdwin Siruno LopezNo ratings yet
- Chapter 4.0 Sensor and Signal CondDocument49 pagesChapter 4.0 Sensor and Signal CondmathewosNo ratings yet
- FM 300Document5 pagesFM 300Happy DealNo ratings yet
- Alcatel-Lucent 1870 Transport Tera Switch (TTS) : Addressing The Exaflood ChallengeDocument8 pagesAlcatel-Lucent 1870 Transport Tera Switch (TTS) : Addressing The Exaflood ChallengeMarco SurcaNo ratings yet
- 0901d19680056c35 Pump Bearing Brochure PDFDocument4 pages0901d19680056c35 Pump Bearing Brochure PDFMohd NazriNo ratings yet
- DC Machines QuizDocument9 pagesDC Machines QuizDanny MartinNo ratings yet
- Solenoid Valve: DescriptionDocument1 pageSolenoid Valve: DescriptionMuhammad Wazim AkramNo ratings yet
- Acct Statement XX5203 16122023Document3 pagesAcct Statement XX5203 16122023sa6307756No ratings yet
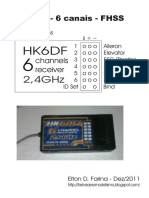
- HK6DF - CanalsDocument1 pageHK6DF - CanalsPool MamaniNo ratings yet
- Detroit Diesel Series 60 Catalogs 1 PDFDocument128 pagesDetroit Diesel Series 60 Catalogs 1 PDFHector Ruben QPNo ratings yet
- WLWC Grade 1 Water Cooled Screw Chiller Manual en Oct 16 2017Document48 pagesWLWC Grade 1 Water Cooled Screw Chiller Manual en Oct 16 2017Ong Mat100% (1)
- 1 2 5 A Sim MechanicalsystemefficiencyDocument4 pages1 2 5 A Sim Mechanicalsystemefficiencyapi-325609547No ratings yet
- Battery Electric VehicleDocument13 pagesBattery Electric VehicleMahesh KatkarNo ratings yet
- Technical Data - Fan Model HUD354: Location: Designation: Performance - Required ActualDocument2 pagesTechnical Data - Fan Model HUD354: Location: Designation: Performance - Required ActualJNo ratings yet
- FEAR ManualDocument53 pagesFEAR ManualViorel AdirvaNo ratings yet
- Roles & Responsibilities of A Maintenance Engineer - LinkedInDocument4 pagesRoles & Responsibilities of A Maintenance Engineer - LinkedInEslam MansourNo ratings yet
- Activity Theory As A Lens For Characterizing The Participatory UnitDocument16 pagesActivity Theory As A Lens For Characterizing The Participatory UnitwordarchitectNo ratings yet
- Technical Catalog 2008Document134 pagesTechnical Catalog 2008Jeffry KarundengNo ratings yet
- Computer Organization and Operating Systems: L.S.K. UdugamaDocument22 pagesComputer Organization and Operating Systems: L.S.K. UdugamakasundotaNo ratings yet
- Harman Kardon Audio Video 1996-97 en CatalogDocument16 pagesHarman Kardon Audio Video 1996-97 en CatalogenergiculNo ratings yet
- Deter, Detect, Defend: Maximizing The Early Warning Network Against Advanced CapabilitiesDocument30 pagesDeter, Detect, Defend: Maximizing The Early Warning Network Against Advanced CapabilitiesFRANKNo ratings yet