You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
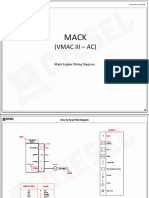
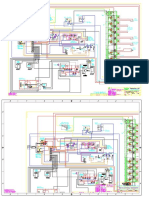
- Mack - All Engines (2003 & Older VMAC III) .VMAC III (AC)Document11 pagesMack - All Engines (2003 & Older VMAC III) .VMAC III (AC)Ricardo J. Pinto50% (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Mining Wide-Body Dump Truck Operators TrainingDocument36 pagesMining Wide-Body Dump Truck Operators Trainingpebi live100% (1)
- SP 305Document152 pagesSP 305Gebe András80% (5)
- Despiece Amortiguador WP PDFDocument99 pagesDespiece Amortiguador WP PDFRoberto Posada LopezNo ratings yet
- DML Electric Test Manual 2657868267 - 007Document77 pagesDML Electric Test Manual 2657868267 - 007Alexander Lopez100% (2)
- 1 - Coupling TrainingDocument54 pages1 - Coupling TrainingTheerayootNo ratings yet
- L7042GL - Specification Data PDFDocument2 pagesL7042GL - Specification Data PDFpedro perez Marin100% (1)
- 4 MivDocument19 pages4 Mivpavankumar001No ratings yet
- MEUS ManualDocument43 pagesMEUS ManualJESUSCALVILLONo ratings yet
- Gas TurbineDocument20 pagesGas Turbinefrancisco_navas447967% (3)
- Design of A Low Cost Thruster For An Autonomous Underwater VehicleDocument6 pagesDesign of A Low Cost Thruster For An Autonomous Underwater VehiclefuadNo ratings yet
- Inner & Outer Bag Packing Machine GuideDocument58 pagesInner & Outer Bag Packing Machine GuideAntonio NawotkaNo ratings yet
- Timberpro P/N 50690: Optional Auxiliary Cooler Return Logic Block Load Sense ValveDocument2 pagesTimberpro P/N 50690: Optional Auxiliary Cooler Return Logic Block Load Sense ValveЕвгений МакаровNo ratings yet
- Dokumen - Tips - JCB 3cx 4cx Spare Parts by MH Machinery LTD Turkey 3cx 4cx Spare Parts by MH MachineryDocument50 pagesDokumen - Tips - JCB 3cx 4cx Spare Parts by MH Machinery LTD Turkey 3cx 4cx Spare Parts by MH Machinerymotrenko123No ratings yet
- Mercedes C280 Motor 104.941 2.8L 1993 A 1997 - Especificações Técnicas - Torques de ApertoDocument5 pagesMercedes C280 Motor 104.941 2.8L 1993 A 1997 - Especificações Técnicas - Torques de ApertoLucas Nascimento LopesNo ratings yet
- FIGURE 3.1 Switched Reluctance Motor Configurations. (A) One Tooth Per Pole. (B) Two Teeth Per Pole (12/10 Poles)Document32 pagesFIGURE 3.1 Switched Reluctance Motor Configurations. (A) One Tooth Per Pole. (B) Two Teeth Per Pole (12/10 Poles)starboyNo ratings yet
- Engine performance curves under 150kWDocument1 pageEngine performance curves under 150kWJulio Alvarado MoralesNo ratings yet
- Westland, British Marine and British Aircraft: FlightDocument1 pageWestland, British Marine and British Aircraft: Flightseafire47No ratings yet
- 236-4572 Arr Core EngineDocument3 pages236-4572 Arr Core EngineERIC ERICNo ratings yet
- Dodge Neon CodesDocument3 pagesDodge Neon Codesmecano_54No ratings yet
- Datasheet Cummins C1000Document6 pagesDatasheet Cummins C1000Alejandro TorrresNo ratings yet
- MT Unit 6 Fluid Moving Machines Pumps Prof R R JoshiDocument25 pagesMT Unit 6 Fluid Moving Machines Pumps Prof R R Joshiaditya panchalNo ratings yet
- Foam Pump Operating and Maintenance ManualDocument16 pagesFoam Pump Operating and Maintenance ManualsaifNo ratings yet
- StepperMotorM49SP 2KDocument2 pagesStepperMotorM49SP 2KSebastián Moreno Donoso100% (1)
- Basic-Machine - Design - Situational - Problem-BY - Alcorcon-1 Basic - Machine - Design - Situational - Problem-BY - Alcorcon-1Document170 pagesBasic-Machine - Design - Situational - Problem-BY - Alcorcon-1 Basic - Machine - Design - Situational - Problem-BY - Alcorcon-1Ullyses SebialNo ratings yet
- ST-101 Data SheetDocument2 pagesST-101 Data Sheetlibrero2014salNo ratings yet
- Ball Valves & AccessoriesDocument36 pagesBall Valves & AccessoriesNguyễn Hoàng HàNo ratings yet
- Air Solenoid Valves Models 68722 Three Way 68966, 68990 69038, 69172Document1 pageAir Solenoid Valves Models 68722 Three Way 68966, 68990 69038, 69172Faidh Maulana Aksyar FaidhNo ratings yet
- TB2044XP EngineDocument2 pagesTB2044XP EngineWormyNo ratings yet
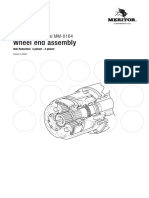
- MM0164 Hub ReductionDocument23 pagesMM0164 Hub Reductionflavio furtado100% (1)