You might also like
- P. C. Sen - Principles of Electric Machines 2edDocument634 pagesP. C. Sen - Principles of Electric Machines 2edwilliancsm100% (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Activity 1. Basic MicrosDocument11 pagesActivity 1. Basic MicrosRoan Eam Tan100% (1)
- Unit Iii Switched Reluctance MotorDocument18 pagesUnit Iii Switched Reluctance MotorMürlî MünnâNo ratings yet
- Module 2 - Switched Reluctance MotorDocument20 pagesModule 2 - Switched Reluctance MotorkesavantNo ratings yet
- Injection of EMF in Rotor Circuit PDFDocument5 pagesInjection of EMF in Rotor Circuit PDFkhidirtay50% (2)
- Motor Drives BY K .Sunil Kumar Griet-Power ElectronicsDocument4 pagesMotor Drives BY K .Sunil Kumar Griet-Power ElectronicsKalyan KumarNo ratings yet
- PM BLDC Motor Drives ExplainedDocument15 pagesPM BLDC Motor Drives ExplainedMahua ChandaNo ratings yet
- Unit3 (Ac Drives)Document20 pagesUnit3 (Ac Drives)vedala chaitanyaNo ratings yet
- Chapter 3 Induction MotorDocument21 pagesChapter 3 Induction Motorahmed aliNo ratings yet
- DC MachineDocument33 pagesDC MachineJevon WilsonNo ratings yet
- Static Analysis of Mutually Coupled Switched Reluctance Motor With Finite Element MethodDocument5 pagesStatic Analysis of Mutually Coupled Switched Reluctance Motor With Finite Element MethodHeshaM MouhammeDNo ratings yet
- Karakteristik Motor KomponDocument14 pagesKarakteristik Motor KomponPola RismaNo ratings yet
- Doubly Fed Induction Generator For Wind TurbinesDocument21 pagesDoubly Fed Induction Generator For Wind TurbinesAdarsh KailashNo ratings yet
- 3.switched Reluctance MotorDocument15 pages3.switched Reluctance MotorAishwaryaNo ratings yet
- Principles of Switched Reluctance Motor OperationDocument52 pagesPrinciples of Switched Reluctance Motor OperationChandru PrasathNo ratings yet
- Power Systems AssignmentDocument12 pagesPower Systems AssignmentJbmulindwaNo ratings yet
- Induction Motor Drive Control MethodsDocument8 pagesInduction Motor Drive Control MethodsRudra Kumar MishraNo ratings yet
- Question Bank: DEPARTMENT OF EEE/Electrical Machines-II/III YEARDocument22 pagesQuestion Bank: DEPARTMENT OF EEE/Electrical Machines-II/III YEARPartha Roy100% (1)
- Induction MachinesDocument11 pagesInduction MachinesTayyab HussainNo ratings yet
- Hase Nduction Achines: Aculty of Ngineering NvironmentDocument10 pagesHase Nduction Achines: Aculty of Ngineering NvironmentMonika VaitulionytėNo ratings yet
- 4 5814692296314062904Document76 pages4 5814692296314062904Dagim KumilachewNo ratings yet
- Electrical and Electronics PrinciplesDocument3 pagesElectrical and Electronics PrinciplesJoseph IsraelNo ratings yet
- Repulsion MotorDocument10 pagesRepulsion MotorAhmed Abd El MoatiNo ratings yet
- 02-1 Synchronous MachinesDocument48 pages02-1 Synchronous MachinesvenikiranNo ratings yet
- The Equivalent Circuit and Torque of Three-Phase Induction MotorDocument11 pagesThe Equivalent Circuit and Torque of Three-Phase Induction Motorعمر تاليونNo ratings yet
- VIT University SRM ChapterDocument27 pagesVIT University SRM ChapterRAJA MNo ratings yet
- Induction MotorDocument10 pagesInduction Motoreng_mhassan1No ratings yet
- Chapter 3 Induction Motor PDFDocument26 pagesChapter 3 Induction Motor PDFNeezam Halim50% (2)
- DC Motor PrimerDocument26 pagesDC Motor PrimerastroltravlerNo ratings yet
- Power Systems TheoryDocument13 pagesPower Systems TheoryGitta JoshuaNo ratings yet
- Synchronous Machine Theory and ModelingDocument108 pagesSynchronous Machine Theory and Modelingnanavarasmdu100% (1)
- Three Phase Synchronous Machines - 2015Document93 pagesThree Phase Synchronous Machines - 2015आश्विन मरहट्टाNo ratings yet
- Sinusoidal PMAC Motor - 6th AprilDocument4 pagesSinusoidal PMAC Motor - 6th AprilSourav KumarNo ratings yet
- BEEE - Unit - II - QBDocument6 pagesBEEE - Unit - II - QBSweetlineSoniaNo ratings yet
- Unit 6 Alternator (Synchronous Generator) : StructureDocument29 pagesUnit 6 Alternator (Synchronous Generator) : StructureMahir Asif Shadman100% (1)
- Unit 02Document26 pagesUnit 02gopaldhanu608No ratings yet
- Chapter11 PDFDocument39 pagesChapter11 PDFSai KiranNo ratings yet
- Modeling and Simulation of BLDC Motor in MATLABDocument5 pagesModeling and Simulation of BLDC Motor in MATLABvishiwizardNo ratings yet
- Transients in Doubly-Fed Induction Machines Due To Supply Voltage SagsDocument4 pagesTransients in Doubly-Fed Induction Machines Due To Supply Voltage SagsArun RajendranNo ratings yet
- Synchronous Machines: Topics To CoverDocument30 pagesSynchronous Machines: Topics To CoverOmar TahaNo ratings yet
- UNIT 7 AlternatorsDocument8 pagesUNIT 7 AlternatorsPadmavathi ShenoyNo ratings yet
- Three Phase Induction Motor ExplainedDocument13 pagesThree Phase Induction Motor ExplainedB ANIL KUMARNo ratings yet
- DC MotorDocument1 pageDC MotorSathish KumarNo ratings yet
- AC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of HelwanDocument25 pagesAC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of Helwanadelelsamahy5958No ratings yet
- Constructional Details:: 1. Explain The Construction Details of Synchronous MotorDocument28 pagesConstructional Details:: 1. Explain The Construction Details of Synchronous MotorrioNo ratings yet
- Improved Design For Reduction of Torque Ripple of Brushless DC MotorDocument4 pagesImproved Design For Reduction of Torque Ripple of Brushless DC MotorPhạm Văn TưởngNo ratings yet
- Optimum Motor Protection en - LIBRODocument80 pagesOptimum Motor Protection en - LIBROEdgardo Kat ReyesNo ratings yet
- Why Star Delta Starter Is Preferred With Induction MotorDocument4 pagesWhy Star Delta Starter Is Preferred With Induction MotorsujithNo ratings yet
- DC Motor Lecture Notes 4Document24 pagesDC Motor Lecture Notes 4Man Ebook100% (1)
- 2011 Design and Construction of Axial Flux Permanent Magnet Generator For Wind Turbine Generated DC Voltage at Rated Power 1500 W (Office)Document4 pages2011 Design and Construction of Axial Flux Permanent Magnet Generator For Wind Turbine Generated DC Voltage at Rated Power 1500 W (Office)Fazal Karim Mahsud100% (1)
- Analysis of Brushless Three-Phase Synchronous Generator Without ExciterDocument10 pagesAnalysis of Brushless Three-Phase Synchronous Generator Without ExciterJuan Andres Rojas SerranoNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Characteristic Modes: Theory and Applications in Antenna EngineeringFrom EverandCharacteristic Modes: Theory and Applications in Antenna EngineeringNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Prehensive Controller Implementation For Wind-PV-Diesel Based Standalone Microgrid - MATLAB 2018ADocument12 pagesPrehensive Controller Implementation For Wind-PV-Diesel Based Standalone Microgrid - MATLAB 2018AstarboyNo ratings yet
- PPTR2Document23 pagesPPTR2starboyNo ratings yet
- Mini ProjectDocument20 pagesMini ProjectstarboyNo ratings yet
- MajorDocument26 pagesMajorstarboyNo ratings yet
- Major PPT Batch 6Document19 pagesMajor PPT Batch 6starboyNo ratings yet
- An Isolated Solar Power Generation Using Boost Converter and Boost InverterDocument10 pagesAn Isolated Solar Power Generation Using Boost Converter and Boost InverterstarboyNo ratings yet
- Solar Pv-Powered SRM Drive For Evs With Flexible Energy Control FunctionsDocument32 pagesSolar Pv-Powered SRM Drive For Evs With Flexible Energy Control FunctionsstarboyNo ratings yet
- Single Phase Grid Connected Fuel System Based On Boost InverterDocument2 pagesSingle Phase Grid Connected Fuel System Based On Boost InverterstarboyNo ratings yet
- Energycontrol Functions Solar Pv-Powered SRM Drive For Evs With FlexibleDocument1 pageEnergycontrol Functions Solar Pv-Powered SRM Drive For Evs With FlexiblestarboyNo ratings yet
- Major Project DocumentDocument60 pagesMajor Project DocumentstarboyNo ratings yet
- A Single-Phase Grid-Connected Fuel Cell System Based On A Boost-InverterDocument7 pagesA Single-Phase Grid-Connected Fuel Cell System Based On A Boost-Inverteranil kasotNo ratings yet
- PV Panel and SRM Drive For EVS With Flexible Energy Control FunctionsDocument13 pagesPV Panel and SRM Drive For EVS With Flexible Energy Control FunctionsstarboyNo ratings yet
- Anurag Engineering College: Major Project Stage-2 Presentation OnDocument36 pagesAnurag Engineering College: Major Project Stage-2 Presentation OnstarboyNo ratings yet
- Batch 6Document21 pagesBatch 6starboyNo ratings yet
- A Single-Phase Grid-Connected Fuel CellDocument10 pagesA Single-Phase Grid-Connected Fuel Cellsanthiyadev100% (1)
- A Single-Phase Grid-Connected Fuel Cell System Based On A Boost-InverterDocument7 pagesA Single-Phase Grid-Connected Fuel Cell System Based On A Boost-Inverteranil kasotNo ratings yet
- Design and Control of Microgrid Fed by RenewableDocument10 pagesDesign and Control of Microgrid Fed by RenewablestarboyNo ratings yet
- A Single-Phase Grid-Connected Fuel Cell System Based On A Boost-InverterDocument7 pagesA Single-Phase Grid-Connected Fuel Cell System Based On A Boost-Inverteranil kasotNo ratings yet
- Power-Current Controller Based Sliding ModeDocument9 pagesPower-Current Controller Based Sliding ModestarboyNo ratings yet
- A Single-Phase Grid-Connected Fuel CellDocument10 pagesA Single-Phase Grid-Connected Fuel Cellsanthiyadev100% (1)
- Power-Current Controller Based Sliding Mode Control For DFIG-wind Energy Conversion SystemDocument45 pagesPower-Current Controller Based Sliding Mode Control For DFIG-wind Energy Conversion SystemstarboyNo ratings yet
- AN857 BLDC Motor Control Made Easy (Microchip)Document48 pagesAN857 BLDC Motor Control Made Easy (Microchip)Carlos Iván RuedaNo ratings yet
- Commutation Torque Ripple Reduction in BLDC Motor Using Modified SEPIC Converter and ThreeDocument2 pagesCommutation Torque Ripple Reduction in BLDC Motor Using Modified SEPIC Converter and ThreestarboyNo ratings yet
- Energycontrol Functions Solar Pv-Powered SRM Drive For Evs With FlexibleDocument1 pageEnergycontrol Functions Solar Pv-Powered SRM Drive For Evs With FlexiblestarboyNo ratings yet
- Major 2Document16 pagesMajor 2starboyNo ratings yet
- PV Panel and SRM Drive For EVS With Flexible Energy Control FunctionsDocument13 pagesPV Panel and SRM Drive For EVS With Flexible Energy Control FunctionsstarboyNo ratings yet
- AN857 BLDC Motor Control Made Easy (Microchip)Document48 pagesAN857 BLDC Motor Control Made Easy (Microchip)Carlos Iván RuedaNo ratings yet
- BLDCDocument53 pagesBLDCstarboyNo ratings yet
- Commutation Torque Ripple Reduction in The BLDCDocument12 pagesCommutation Torque Ripple Reduction in The BLDCstarboyNo ratings yet
- Motor Technical Brochure PDFDocument24 pagesMotor Technical Brochure PDFvinodk335100% (1)
- 72 Cells DatasheetDocument2 pages72 Cells DatasheetSemih HürmeydanNo ratings yet
- Electr Ical Characteristic Curves Dimensions (MM)Document2 pagesElectr Ical Characteristic Curves Dimensions (MM)steffatoNo ratings yet
- Wireless Receiver: User GuideDocument8 pagesWireless Receiver: User GuideIBJSC.comNo ratings yet
- Lecture Notes - Voltage ControlDocument12 pagesLecture Notes - Voltage ControlNik Mohd Bazli100% (1)
- Service manual for Fender Bassman 400/400H amplifierDocument17 pagesService manual for Fender Bassman 400/400H amplifierHasanudin UdinNo ratings yet
- (4-2) Synchronous GeneratorDocument35 pages(4-2) Synchronous Generatorfarah haniNo ratings yet
- 1SDC200006D0209 - Emax en PDFDocument276 pages1SDC200006D0209 - Emax en PDFAhmad Hamouda100% (1)
- Question Bank Class Xii PhysicsDocument151 pagesQuestion Bank Class Xii PhysicsYogesh BansalNo ratings yet
- Electronic Circuit: Long Range FM Voice Transmitter CircuitDocument3 pagesElectronic Circuit: Long Range FM Voice Transmitter CircuitMomNo ratings yet
- A Review of Magnetic Repulsion EngineDocument4 pagesA Review of Magnetic Repulsion Enginejoy 11No ratings yet
- Cheetah Xi™ Enclosure Installation Instructions: DescriptionDocument4 pagesCheetah Xi™ Enclosure Installation Instructions: DescriptionErickson ReyesNo ratings yet
- Pe - 1973-08Document118 pagesPe - 1973-08Anonymous kdqf49qbNo ratings yet
- TFGS HumosDocument4 pagesTFGS HumosCarlos CastilloNo ratings yet
- PLOT - 11 NotesDocument1 pagePLOT - 11 NotesSadeeskumar NilNo ratings yet
- Es217 - 33kv Connections Up To 90mvaDocument17 pagesEs217 - 33kv Connections Up To 90mvaPhyo WaiNo ratings yet
- 2.5l Petrol Engine, DAZA: Current Flow DiagramDocument24 pages2.5l Petrol Engine, DAZA: Current Flow DiagramildefonsoNo ratings yet
- Electronics NEPShyllabusDocument38 pagesElectronics NEPShyllabusRanuj HazarikaNo ratings yet
- TLE7 CSS - Mod5 - Terminating and Connecting Electrical Wiring and Electronic Circuit - V3Document31 pagesTLE7 CSS - Mod5 - Terminating and Connecting Electrical Wiring and Electronic Circuit - V3Daniela EndinoNo ratings yet
- Science Lesson 48Document42 pagesScience Lesson 48Giselle DyNo ratings yet
- Esp Reda SLB - VSDDocument33 pagesEsp Reda SLB - VSDneoamnNo ratings yet
- CNBC Price ListDocument1 pageCNBC Price ListcvmostertNo ratings yet
- MC74HC1G08 2-Imput and GateDocument12 pagesMC74HC1G08 2-Imput and GateadyanNo ratings yet
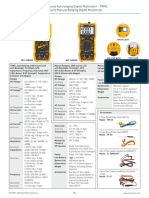
- 312 Digits 2000 Counts Manual Ranging Digital Multimeter Model 603 Junior 282Document1 page312 Digits 2000 Counts Manual Ranging Digital Multimeter Model 603 Junior 282Vijay KumarNo ratings yet
- FUNCTION GENERATOR: PRODUCING ELECTRICAL WAVEFORMS FOR TESTING AND DEVELOPMENTDocument3 pagesFUNCTION GENERATOR: PRODUCING ELECTRICAL WAVEFORMS FOR TESTING AND DEVELOPMENTcsaproNo ratings yet
- Samsung LS15N13WDocument65 pagesSamsung LS15N13WmiltoncgNo ratings yet
- Lecture - 25 Time Dependent Perturbation Stanford UniversityDocument39 pagesLecture - 25 Time Dependent Perturbation Stanford UniversityGarima TanwarNo ratings yet
- Syllabus of Eeb162Document2 pagesSyllabus of Eeb162Dr. Tirupathiraju KanumuriNo ratings yet
- TSP PanelDocument40 pagesTSP Paneldan_geplNo ratings yet