You might also like
- 8085 RefDocument2 pages8085 RefBiggRangerNo ratings yet
- Z80PCRDDocument2 pagesZ80PCRDKhánh NguyễnNo ratings yet
- Schematics PDFDocument7 pagesSchematics PDFCristian GonzalezNo ratings yet
- Pg320240 D.PDF LCDDocument1 pagePg320240 D.PDF LCDSintesoftNo ratings yet
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- MMB0 RevC SchematicDocument1 pageMMB0 RevC SchematicbiotekyNo ratings yet
- Z80PCRDDocument2 pagesZ80PCRDTấn Phát TrầnNo ratings yet
- Tabela AsciiDocument1 pageTabela AsciiTilinschi LucianNo ratings yet
- Acer Aspire 3610 - Wistron Morar - Rev SBDocument40 pagesAcer Aspire 3610 - Wistron Morar - Rev SBPer JensenNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Digital Panel MeterDocument2 pagesDigital Panel MeterUsman RahimNo ratings yet
- MIPS Green CardDocument2 pagesMIPS Green Cardkokio787No ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- MIPS Reference Data CardDocument2 pagesMIPS Reference Data Cardagony1091No ratings yet
- Schem AnticDocument1 pageSchem Anticthanhv_25100% (1)
- Software Evam Media: Parichay, Sanchalan, Internet Evam FacebookFrom EverandSoftware Evam Media: Parichay, Sanchalan, Internet Evam FacebookNo ratings yet
- Reference Data: Arithmetic Core Instruction SetDocument15 pagesReference Data: Arithmetic Core Instruction SetBin Rain MThuanNo ratings yet
- Electronic Circuit Design Ideas: Edn Series for Design EngineersFrom EverandElectronic Circuit Design Ideas: Edn Series for Design EngineersRating: 5 out of 5 stars5/5 (2)
- MIPS Green SheetDocument2 pagesMIPS Green SheetjasontgameNo ratings yet
- MIPS Green CardDocument2 pagesMIPS Green CardMahmoud HelalNo ratings yet
- 4GB Registered DDR2 SDRAM DIMM: EBE41AE4ACFA (512M Words 72 Bits, 2 Ranks)Document27 pages4GB Registered DDR2 SDRAM DIMM: EBE41AE4ACFA (512M Words 72 Bits, 2 Ranks)ramgopalreddykNo ratings yet
- Behringer Djx700 Professional Mixer DJ Schematic AudioDocument10 pagesBehringer Djx700 Professional Mixer DJ Schematic AudioMinciuna Catalin100% (1)
- Ts 7500 SchematicDocument4 pagesTs 7500 Schematicimransiddiquiatvxt100% (1)
- 64-Bit Thermal Head Driver: FeaturesDocument4 pages64-Bit Thermal Head Driver: FeaturesolgonowNo ratings yet
- SCH TPM 4250 6250 8250 30-01-08 PDFDocument22 pagesSCH TPM 4250 6250 8250 30-01-08 PDFJosé Benavides0% (2)
- Outline Dimension & Block Diagram: The Tolerance Unless Classified 0.3mmDocument1 pageOutline Dimension & Block Diagram: The Tolerance Unless Classified 0.3mmTutorias CardonaNo ratings yet
- TM 7043Document13 pagesTM 7043Radek KurekNo ratings yet
- Wistron Dasher 1 - Thinkpad X220 SchematicsDocument101 pagesWistron Dasher 1 - Thinkpad X220 Schematicsnroach44No ratings yet
- PG 12864-ADocument1 pagePG 12864-AeduardoavargasNo ratings yet
- Ibm X61Document78 pagesIbm X61Abubakar SidikNo ratings yet
- Armmini Lm3s8000v10 SchematicDocument2 pagesArmmini Lm3s8000v10 SchematicDuong Ngoc LuonNo ratings yet
- Memory Module Specifications: KVR667D2D4F5/2G 2GB 256M X 72-Bit PC2-5300 Cl5 Ecc 240-Pin FbdimmDocument7 pagesMemory Module Specifications: KVR667D2D4F5/2G 2GB 256M X 72-Bit PC2-5300 Cl5 Ecc 240-Pin FbdimmHippyKillerNo ratings yet
- U3 D1 U1 LCD16x2 U2 LM7805: VCC VDDDocument1 pageU3 D1 U1 LCD16x2 U2 LM7805: VCC VDDNguyen Anh TuanNo ratings yet
- Daewoo DVG 6000DDocument12 pagesDaewoo DVG 6000DOssian Valera PinedaNo ratings yet
- EXPERIMENT 7: Introduction To Universal Serial Asynchronous Receive Transmit (Usart) ObjectiveDocument9 pagesEXPERIMENT 7: Introduction To Universal Serial Asynchronous Receive Transmit (Usart) ObjectiveSalemAbaadNo ratings yet
- Dream: ChiposDocument1 pageDream: ChiposHernan BenitesNo ratings yet
- U1 LT8612EUDE U1 LT8612EUDE: Notes: Unless Otherwise SpecifiedDocument1 pageU1 LT8612EUDE U1 LT8612EUDE: Notes: Unless Otherwise Specifiedkunalkundanam1046No ratings yet
- PSR-S700 S900 Lsi CDocument13 pagesPSR-S700 S900 Lsi CAdriano CamocardiNo ratings yet
- Labx 1 SCHDocument2 pagesLabx 1 SCHercervantesNo ratings yet
- LAB-X1 SchematicDocument2 pagesLAB-X1 SchematicRenato MirandaNo ratings yet
- Dell Inspiron 1525 Schematic DiagramDocument47 pagesDell Inspiron 1525 Schematic Diagramogon601100% (2)
- 2ad78 Quanta ZQP (Daozqpmb6co) Aspire 4250Document32 pages2ad78 Quanta ZQP (Daozqpmb6co) Aspire 4250iskenderbeyNo ratings yet
- Spock: Power Serial I/ODocument5 pagesSpock: Power Serial I/OSanyi Ocsai100% (2)
- PG 128128-ADocument1 pagePG 128128-ARekhyttolemyNo ratings yet
- Schema Toshiba C650D 6050A2355201-MB-A01Document61 pagesSchema Toshiba C650D 6050A2355201-MB-A01achyouth50% (2)
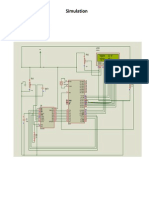
- Simulation: CAD Tool: Proteus 8.0Document2 pagesSimulation: CAD Tool: Proteus 8.0Shah PatelNo ratings yet
- Hws 13642Document3 pagesHws 13642dhieward100% (2)
- 1316 AschDocument1 page1316 AschAnonymous 3mJfZENo ratings yet