You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Quantum Energy Generator - Free Energy Device BlueprintsDocument35 pagesQuantum Energy Generator - Free Energy Device Blueprintsenerchi111181% (16)
- Technical Specifications 2c X 4 mm2 4C X 6mm2 XLPE 2025Document7 pagesTechnical Specifications 2c X 4 mm2 4C X 6mm2 XLPE 2025cricket storiesNo ratings yet
- Nichrome Wire CalculationDocument7 pagesNichrome Wire CalculationDilipSinghNo ratings yet
- Morgan, Matthew A - Reflectionless Filters-Artech House (2017)Document277 pagesMorgan, Matthew A - Reflectionless Filters-Artech House (2017)frankmhowellNo ratings yet
- ELMARK ElectricDocument249 pagesELMARK ElectricAdrian Margescu100% (1)
- Ee 115 - EtapDocument6 pagesEe 115 - EtapMichael Calizo PacisNo ratings yet
- EE220 OBE RevisedDocument7 pagesEE220 OBE RevisedMichael Calizo PacisNo ratings yet
- Chapter 3MCCBLDocument30 pagesChapter 3MCCBLMichael Calizo PacisNo ratings yet
- Class Notes Unit 2 PartBDocument22 pagesClass Notes Unit 2 PartBMichael Calizo PacisNo ratings yet
- School of Electrical, Electronics and Computer Engineering: Mapúa Institute of TechnologyDocument5 pagesSchool of Electrical, Electronics and Computer Engineering: Mapúa Institute of TechnologyMichael Calizo PacisNo ratings yet
- EE223 OBE RevisedDocument6 pagesEE223 OBE RevisedMichael Calizo PacisNo ratings yet
- Master of Science in Electrical Engineering: Course Code Course Title Credit Units Caretake R Core Courses (9 Units)Document4 pagesMaster of Science in Electrical Engineering: Course Code Course Title Credit Units Caretake R Core Courses (9 Units)Michael Calizo PacisNo ratings yet
- Fse BMSDocument49 pagesFse BMSMichael Calizo PacisNo ratings yet
- Math10 Chapter3Document70 pagesMath10 Chapter3Michael Calizo PacisNo ratings yet
- Essential Power System Requirements For Next Generation Data CentersDocument11 pagesEssential Power System Requirements For Next Generation Data CentersMichael Calizo PacisNo ratings yet
- Experiment No. 1: DIFFERENT TYPES OF Uninterruptible Power Supply (UPS) Systems ObjectiveDocument2 pagesExperiment No. 1: DIFFERENT TYPES OF Uninterruptible Power Supply (UPS) Systems ObjectiveMichael Calizo PacisNo ratings yet
- Essential Rack System Requirements For Next Generation Data CentersDocument14 pagesEssential Rack System Requirements For Next Generation Data CentersMichael Calizo PacisNo ratings yet
- Deifferent Type of UPS TechnologyDocument8 pagesDeifferent Type of UPS TechnologyMichael Calizo PacisNo ratings yet
- Solar PV Lab 2Document21 pagesSolar PV Lab 2Michael Calizo PacisNo ratings yet
- Arc FlashDocument4 pagesArc FlashmoentaseerNo ratings yet
- Hydropower Site Assessment: University of The Philippines - DilimanDocument10 pagesHydropower Site Assessment: University of The Philippines - DilimanMichael Calizo PacisNo ratings yet
- Etap Tip 010Document9 pagesEtap Tip 010Michael Calizo PacisNo ratings yet
- EgyE 205 Syllabus Updated 2 - 2011-12Document2 pagesEgyE 205 Syllabus Updated 2 - 2011-12Michael Calizo PacisNo ratings yet
- Etap Tip 001Document4 pagesEtap Tip 001Michael Calizo PacisNo ratings yet
- Features: 512K-Bit (X 1) Cmos Serial FlashDocument39 pagesFeatures: 512K-Bit (X 1) Cmos Serial FlashPedro VeraNo ratings yet
- LG 42LV355C Chassis LB0ACDocument61 pagesLG 42LV355C Chassis LB0ACJose Barroso GuerraNo ratings yet
- WEG Regulador Automatico de Tensao Grta 2d MGML07 00141 Manual Portugues Ingles EspanholDocument51 pagesWEG Regulador Automatico de Tensao Grta 2d MGML07 00141 Manual Portugues Ingles EspanholEDWIN RODOLFO KUKA YUMANNo ratings yet
- Sine Wave PWM (SPWM) Circuit Using Opamp - Homemade Circuit ProjectsDocument28 pagesSine Wave PWM (SPWM) Circuit Using Opamp - Homemade Circuit Projectsdudulemarc100% (1)
- Operator'S Manual: Navtex ReceiverDocument89 pagesOperator'S Manual: Navtex ReceiverArun SinghNo ratings yet
- Alternating Current 24Document31 pagesAlternating Current 24sri kanthNo ratings yet
- Dictionary en CRO TechnicalDocument1,105 pagesDictionary en CRO TechnicalKatarina R.M.No ratings yet
- Voltage Source Inverter Design Guide: TI Designs: TIDM-HV-1PH-DCACDocument47 pagesVoltage Source Inverter Design Guide: TI Designs: TIDM-HV-1PH-DCACamrehmaniNo ratings yet
- ZenithParts O 1153AFDocument15 pagesZenithParts O 1153AFSteve ANo ratings yet
- Realworld Maximum Power Point Tracking Simulation of PV System Based On Fuzzy Logic ControlDocument9 pagesRealworld Maximum Power Point Tracking Simulation of PV System Based On Fuzzy Logic ControlArulNo ratings yet
- Optidrive Plus 3gv Manual v2.10Document12 pagesOptidrive Plus 3gv Manual v2.10Federico Castiella100% (1)
- Minimization of Power Losses Through Optimal Battery Placement in A Distributed Network With High Penetration of PhotovoltaicsDocument16 pagesMinimization of Power Losses Through Optimal Battery Placement in A Distributed Network With High Penetration of Photovoltaicspoulomi gangulyNo ratings yet
- DMK20 20230604Document2 pagesDMK20 20230604IBRAHIM AL-SURAIHINo ratings yet
- ComponentsDocument28 pagesComponentsGyan Swaroop TripathiNo ratings yet
- DS SX1261-2 V1.1-1307803Document108 pagesDS SX1261-2 V1.1-1307803Jose BenitezNo ratings yet
- Emerson Hktv13 Chassis Cn-001nk SvcmnlsDocument38 pagesEmerson Hktv13 Chassis Cn-001nk SvcmnlsAvr Electronica ChileNo ratings yet
- Worked Annotated Sample Problems CreateDocument8 pagesWorked Annotated Sample Problems CreateJohnrenald SuelloNo ratings yet
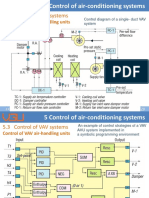
- Control of VAV Air-Handling UnitsDocument9 pagesControl of VAV Air-Handling UnitsAnh Cao Minh NgocNo ratings yet
- M4066BP Mitsubishi PDFDocument5 pagesM4066BP Mitsubishi PDFDeivys VargasNo ratings yet
- 10jhao XXXXSD PDFDocument1 page10jhao XXXXSD PDFGustavo CochachínNo ratings yet
- MN SR CoprecipitacionDocument10 pagesMN SR CoprecipitacionLizbethNo ratings yet
- Reference Books For ECEDocument1 pageReference Books For ECEPrapul ReddyNo ratings yet
- Test-Summary Formation FactorDocument15 pagesTest-Summary Formation FactorWanucy Barroso RodriguesNo ratings yet
- Yonos PARA RS /7.5 RKA: DatasheetDocument8 pagesYonos PARA RS /7.5 RKA: DatasheetPodariu CosminNo ratings yet
- GDS FinalDocument1,317 pagesGDS FinalRachad BachaNo ratings yet