You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- List Out The Advantages and Disadvantages of FIR Filt S.: PART A - (10 X 2 20)Document3 pagesList Out The Advantages and Disadvantages of FIR Filt S.: PART A - (10 X 2 20)Anonymous gAVMpR0aNo ratings yet
- UVa Problem List Catagorized Algorithmic Problem PDFDocument8 pagesUVa Problem List Catagorized Algorithmic Problem PDFRafid HasanNo ratings yet
- Eisenstein NLP NotesDocument587 pagesEisenstein NLP NotesaklfkasdfjNo ratings yet
- JNTU BTECH 2-1 Data Structures NOTESDocument104 pagesJNTU BTECH 2-1 Data Structures NOTESvenky9797No ratings yet
- Risk analysis techniques for capital budgeting decisionsDocument59 pagesRisk analysis techniques for capital budgeting decisionsDiptish RamtekeNo ratings yet
- GAN ReportDocument24 pagesGAN ReportsenthilnathanNo ratings yet
- Dept. of EEE, Prime UniversityDocument16 pagesDept. of EEE, Prime UniversityMD Rakib SHordorNo ratings yet
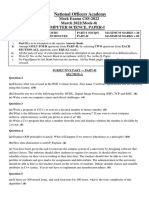
- National Officers Academy Mock Exams CSS-2022 Computer Science Paper 1Document2 pagesNational Officers Academy Mock Exams CSS-2022 Computer Science Paper 1Ishmaal KhanNo ratings yet
- Exercise - Types of Algebraic ExpressionsDocument4 pagesExercise - Types of Algebraic ExpressionsNarayanamurthy AmirapuNo ratings yet
- Ee5239 HW3-2Document8 pagesEe5239 HW3-2Sarthak JainNo ratings yet
- Topic 1-PV, FV, Annunities, Perpetuities - No SolutionsDocument47 pagesTopic 1-PV, FV, Annunities, Perpetuities - No SolutionsJorge Alberto HerreraNo ratings yet
- Reliability Study On A Fire Detection SystemDocument35 pagesReliability Study On A Fire Detection SystemNelso BedinNo ratings yet
- PplaneDocument122 pagesPplanekhamruddinNo ratings yet
- Slides Chapter 04Document19 pagesSlides Chapter 04Ruthwik S GowdaNo ratings yet
- Credit Card Fraud Detection With CNN 99 AccuracyDocument12 pagesCredit Card Fraud Detection With CNN 99 AccuracyJadeNo ratings yet
- TOC MCQ by SIRDocument12 pagesTOC MCQ by SIRAfreen MallickNo ratings yet
- Silverwood 2007 ReportDocument23 pagesSilverwood 2007 ReportAbhi RockzzNo ratings yet
- Interpolation in GNU RadioDocument9 pagesInterpolation in GNU RadioRakesh S KNo ratings yet
- Wpbe SeDocument2 pagesWpbe SeJ. Fernando G. R.No ratings yet
- Agile MetricsDocument63 pagesAgile Metricsmanishkumar.allduniv4908No ratings yet
- Laboratory Manual 4: Discrete Time Fourier Transform & Discrete Fourier TransformDocument10 pagesLaboratory Manual 4: Discrete Time Fourier Transform & Discrete Fourier TransformHassanNo ratings yet
- Calculating NPV, IRR, PBP and DPBP for an Investment ProjectDocument7 pagesCalculating NPV, IRR, PBP and DPBP for an Investment ProjectNgân NguyễnNo ratings yet
- Solving First-Order DE Using Solution Curves, Separation of Variables and Linear MethodsDocument2 pagesSolving First-Order DE Using Solution Curves, Separation of Variables and Linear MethodsjosiahgerberNo ratings yet
- Assignment 4Document3 pagesAssignment 4Uday GulghaneNo ratings yet
- Regressao Linear Simples - Ipynb - ColaboratoryDocument2 pagesRegressao Linear Simples - Ipynb - ColaboratoryGestão Financeira Fatec Bragança100% (1)
- Moving Average Convergence/divergenceDocument5 pagesMoving Average Convergence/divergenceSudershan ThaibaNo ratings yet
- Problem: Draw A Control Flow Diagram For This Function. Label Each Edge With An Uppercase LetterDocument20 pagesProblem: Draw A Control Flow Diagram For This Function. Label Each Edge With An Uppercase LetterAbdul HananNo ratings yet
- SLC - OPT Math - PolynomialsDocument0 pagesSLC - OPT Math - Polynomialswww.bhawesh.com.npNo ratings yet
- 01712818Document6 pages01712818frozen3592No ratings yet
- QuizzesDocument5 pagesQuizzesWalid BarakatNo ratings yet