You might also like
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Use of Close Protection Vehicle TechniquesDocument76 pagesUse of Close Protection Vehicle Techniquesvympel.1274100% (2)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Weightlifting 101 - OP3 (January 2020)Document140 pagesWeightlifting 101 - OP3 (January 2020)Yusuf DuranNo ratings yet
- Converge&Diverge Lab ReportDocument28 pagesConverge&Diverge Lab ReportIrfan Syafiq40% (5)
- Ball Mill GuiaDocument25 pagesBall Mill Guiajuan100% (1)
- Serpentines Guntner GCO PDFDocument8 pagesSerpentines Guntner GCO PDFEduardo Cueva ZamoraNo ratings yet
- Poly Vinyl ChlorideDocument16 pagesPoly Vinyl ChlorideVigneshwaran Aiyappan100% (2)
- Lesson Plan GR 11 BioDocument8 pagesLesson Plan GR 11 Bioapi-278566859No ratings yet
- Man McsDocument96 pagesMan McsRenato MeloNo ratings yet
- PMF-015-HSE-120 v2DRAFT HSE Guideline For Construction Sites Manual HandlingDocument14 pagesPMF-015-HSE-120 v2DRAFT HSE Guideline For Construction Sites Manual HandlingmerinofalNo ratings yet
- ORGANISASI SELULER - Struktur Dan Fungsi-2017 PDFDocument58 pagesORGANISASI SELULER - Struktur Dan Fungsi-2017 PDFMantanindah 0206No ratings yet
- Cbip Manual On RelayDocument2 pagesCbip Manual On RelayPrashant TrivediNo ratings yet
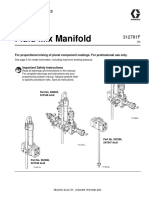
- 312781en-F - Bloco ManifoldDocument26 pages312781en-F - Bloco Manifoldcraftluiz59No ratings yet
- Activity WorksheetDocument5 pagesActivity WorksheetMarlon S. BarangganNo ratings yet
- Reflex Ez TracDocument2 pagesReflex Ez TracSoleh Sundava100% (1)
- Product Life Cycle of Tata SaltDocument14 pagesProduct Life Cycle of Tata SaltHARIPRANESH KNo ratings yet
- A Review HypertensionDocument7 pagesA Review HypertensionEditor IJTSRDNo ratings yet
- IIT Leader Combined Phase I 2Document125 pagesIIT Leader Combined Phase I 2Kashish JainNo ratings yet
- Energy Conservation Building Code (Ecbc) & Energy Efficiency in Existing BuildingsDocument4 pagesEnergy Conservation Building Code (Ecbc) & Energy Efficiency in Existing BuildingsShivaniSharmaNo ratings yet
- Homework 4Document3 pagesHomework 4DavidMuñozNo ratings yet
- At Command Manual For ZTE Corporation MG2639 V2 Module v2.0Document79 pagesAt Command Manual For ZTE Corporation MG2639 V2 Module v2.0Abdou Elrrahmane BenaferiNo ratings yet
- Strategic Human Resource ManagementDocument19 pagesStrategic Human Resource ManagementShivam LohtiaNo ratings yet
- AbcDocument58 pagesAbcSaqeeb Shaikh100% (1)
- Personal StatementDocument2 pagesPersonal StatementDaniela PerezNo ratings yet
- Lab Report 1 (E21A0482)Document3 pagesLab Report 1 (E21A0482)Fatihah AlhataNo ratings yet
- The KENDALL Coefficient of ConcordanceDocument3 pagesThe KENDALL Coefficient of ConcordanceCynthia Gemino BurgosNo ratings yet
- Parts Manual Bandeja M8Document27 pagesParts Manual Bandeja M8pabloNo ratings yet
- Physical Properties Interactive Word Wall Labels: Teks 4.5ADocument12 pagesPhysical Properties Interactive Word Wall Labels: Teks 4.5AAyman HomedanNo ratings yet
- FX3U-32MT-6AI2AO使用手册 backup.zh-CN.enDocument14 pagesFX3U-32MT-6AI2AO使用手册 backup.zh-CN.enTrieeNo ratings yet
- Assignment - 1 Introduction of Machines and Mechanisms: TheoryDocument23 pagesAssignment - 1 Introduction of Machines and Mechanisms: TheoryAman AmanNo ratings yet