You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Synchronous Homopolar Machine For High-Speed ApplicationsDocument11 pagesA Synchronous Homopolar Machine For High-Speed ApplicationsiMiklaeNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Multi-Parameter Homotopy Methods For Finding Periodic Solutions of Nonlinear CircuitsDocument4 pagesMulti-Parameter Homotopy Methods For Finding Periodic Solutions of Nonlinear CircuitsiMiklaeNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- On Optimal Programmed PWM Waveforms For DC-DC ConvertersDocument8 pagesOn Optimal Programmed PWM Waveforms For DC-DC ConvertersiMiklaeNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Accelerating Video Cisco Wide Area App & Digital Media Sys (White - Paper - c11-499857)Document8 pagesAccelerating Video Cisco Wide Area App & Digital Media Sys (White - Paper - c11-499857)iMiklaeNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Programmed Pulsewidth Modulated Waveforms For Electromagnetic Interference Mitigation in DC-DC ConvertersDocument10 pagesProgrammed Pulsewidth Modulated Waveforms For Electromagnetic Interference Mitigation in DC-DC ConvertersiMiklaeNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Soft-Switched Square-Wave Half-Bridge DC-DC ConverterDocument8 pagesSoft-Switched Square-Wave Half-Bridge DC-DC ConverteriMiklaeNo ratings yet
- An Integrated Flywheel Energy Storage System With Homopolar Inductor Motor/Generator and High-Frequency DriveDocument16 pagesAn Integrated Flywheel Energy Storage System With Homopolar Inductor Motor/Generator and High-Frequency DriveiMiklaeNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Observers For Flux Estimation in Induction MachinesDocument10 pagesObservers For Flux Estimation in Induction MachinesiMiklaeNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- A Self-Sensing Homopolar Magnetic Bearing: Analysis and Experimental ResultsDocument6 pagesA Self-Sensing Homopolar Magnetic Bearing: Analysis and Experimental ResultsiMiklaeNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Optimum Biasing For Parallel Hybrid Switching-Linear RegulatorsDocument8 pagesOptimum Biasing For Parallel Hybrid Switching-Linear RegulatorsiMiklaeNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Soft-Switched Constant-Frequency Square-Wave Half-Bridge DC-DC ConverterDocument7 pagesA Soft-Switched Constant-Frequency Square-Wave Half-Bridge DC-DC ConverteriMiklaeNo ratings yet
- Models For Induction Machines With Magnetic Saturation of The Main Flux PathDocument11 pagesModels For Induction Machines With Magnetic Saturation of The Main Flux PathiMiklaeNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Microfabrication Process For High-Frequency Power-Conversion TransformersDocument7 pagesMicrofabrication Process For High-Frequency Power-Conversion TransformersiMiklaeNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Measured Performance of A High-Power-Density Microfabricated Transformer in A DC-DC ConverterDocument8 pagesMeasured Performance of A High-Power-Density Microfabricated Transformer in A DC-DC ConverteriMiklaeNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Microfabrication of Transformers and Inductors For High Frequency Power ConversionDocument9 pagesMicrofabrication of Transformers and Inductors For High Frequency Power ConversioniMiklaeNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Models For Induction Machines With Magnetic Saturation of The Main Flux PathDocument9 pagesModels For Induction Machines With Magnetic Saturation of The Main Flux PathiMiklaeNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Control Systems For Induction Machines With Magnetic SaturationDocument11 pagesControl Systems For Induction Machines With Magnetic SaturationiMiklaeNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Microfabrication Process For High-Frequency Power-Conversion TransformersDocument7 pagesMicrofabrication Process For High-Frequency Power-Conversion TransformersiMiklaeNo ratings yet
- Power Supply Rejection For RF Amplifiers: Theory and MeasurementsDocument10 pagesPower Supply Rejection For RF Amplifiers: Theory and MeasurementsiMiklaeNo ratings yet
- Power Supply Rejection For Common-Source Linear RF Amplifiers: Theory and MeasurementsDocument4 pagesPower Supply Rejection For Common-Source Linear RF Amplifiers: Theory and MeasurementsiMiklaeNo ratings yet
- Pulse-Density Modulation For RF Applications: The Radio-Frequency Power Amplifier (RF PA) As A Power ConverterDocument6 pagesPulse-Density Modulation For RF Applications: The Radio-Frequency Power Amplifier (RF PA) As A Power ConverteriMiklaeNo ratings yet
- Optimum Bias Calculation For Parallel Hybrid Switching-Linear RegulatorsDocument6 pagesOptimum Bias Calculation For Parallel Hybrid Switching-Linear RegulatorsiMiklaeNo ratings yet
- Simplified Modelling and Control of A Synchronous Machine With Variable-Speed Six-Step DriveDocument7 pagesSimplified Modelling and Control of A Synchronous Machine With Variable-Speed Six-Step DriveiMiklaeNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- A 2.4GHz, 20dBm Class-D PA With Single-Bit Digital Polar Modulation in 90nm CMOSDocument4 pagesA 2.4GHz, 20dBm Class-D PA With Single-Bit Digital Polar Modulation in 90nm CMOSiMiklaeNo ratings yet
- Design of Microfabricated Transformers and Inductors For High-Frequency Power ConversionDocument11 pagesDesign of Microfabricated Transformers and Inductors For High-Frequency Power ConversioniMiklaeNo ratings yet
- Synthesis of Averaged Circuit Models For Switched Power ConvertersDocument11 pagesSynthesis of Averaged Circuit Models For Switched Power ConvertersiMiklaeNo ratings yet
- Dynamic Phasors in Modeling and Analysis of Unbalanced Polyphase AC MachinesDocument7 pagesDynamic Phasors in Modeling and Analysis of Unbalanced Polyphase AC MachinesiMiklaeNo ratings yet
- Lyapunov-Based Control For Switched Power ConvertersDocument8 pagesLyapunov-Based Control For Switched Power ConvertersiMiklaeNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Justification of The Describing Function Method For Periodically Switched CircuitsDocument4 pagesJustification of The Describing Function Method For Periodically Switched CircuitsiMiklaeNo ratings yet
- Lyapunov-Based Control For Switched Power ConvertersDocument8 pagesLyapunov-Based Control For Switched Power ConvertersiMiklaeNo ratings yet
- GS9216Document1 pageGS9216ziko0% (2)
- Practical Buck Converter DesignDocument97 pagesPractical Buck Converter DesignGerard Francesco ApolinarioNo ratings yet
- An Introducion of PLECSDocument30 pagesAn Introducion of PLECSVoVi Phap DanhNo ratings yet
- 1Document5 pages1Prajnyajit MohantyNo ratings yet
- Yuxin Li Dissertation Version3Document175 pagesYuxin Li Dissertation Version3WokoNo ratings yet
- VC-touch Building GuideDocument19 pagesVC-touch Building GuideRyan PangNo ratings yet
- LM2576Document24 pagesLM2576gemnsterNo ratings yet
- DC DC Converters Lecture Notes Tutorial Problems PDFDocument23 pagesDC DC Converters Lecture Notes Tutorial Problems PDFBreaking BadNo ratings yet
- Ex No:6 Modelling and Simulation of Buck and Boost Converter 10.11.2014Document6 pagesEx No:6 Modelling and Simulation of Buck and Boost Converter 10.11.2014dhineshpNo ratings yet
- Practical and simulation implementation of Bi-directional DC/DC converter controlled by ARDUINO using MATLAB-SIMULINKDocument6 pagesPractical and simulation implementation of Bi-directional DC/DC converter controlled by ARDUINO using MATLAB-SIMULINKĐức VõNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Design and Implementation of Push-Pull Converter Forrgb Led Lighting System-2Document7 pagesDesign and Implementation of Push-Pull Converter Forrgb Led Lighting System-2IAEME PublicationNo ratings yet
- Battery Power Applications Design Guide: Analog and Interface Product SolutionsDocument14 pagesBattery Power Applications Design Guide: Analog and Interface Product SolutionsLester Gonzaga ListonNo ratings yet
- Report On Power Bank For SmartphonesDocument36 pagesReport On Power Bank For SmartphonesMahesh A100% (1)
- Dedf2011 Yablokov Ti PmuDocument30 pagesDedf2011 Yablokov Ti PmupvickyNo ratings yet
- QN3107M6N: General Description Product SummaryDocument5 pagesQN3107M6N: General Description Product SummarylalukurniawanNo ratings yet
- GATE EE Solved Paper For 6th Feb 2016 (Set A)Document36 pagesGATE EE Solved Paper For 6th Feb 2016 (Set A)Team RaagNo ratings yet
- BuckDocument11 pagesBuckKrittapop SaleechanNo ratings yet
- Tiduem 7 ADocument62 pagesTiduem 7 Apawan kumar raiNo ratings yet
- Battery Supplied Arc WelderDocument5 pagesBattery Supplied Arc WelderJuan Galeano100% (1)
- 001-15223 AN2344 Power Management Battery Charger With Cell Balancing and Fuel Gauge Function SupportDocument14 pages001-15223 AN2344 Power Management Battery Charger With Cell Balancing and Fuel Gauge Function SupportCONG TRAN NGOCNo ratings yet
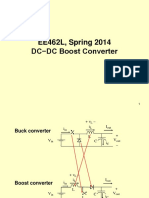
- DC DC Boost ConverterDocument21 pagesDC DC Boost Converterrokbraihan2No ratings yet
- Design and Simulation of Protection System in Switched Mode Power SupplyDocument60 pagesDesign and Simulation of Protection System in Switched Mode Power SupplyFarbod Jz.No ratings yet
- A Current-Fed Parallel Resonant Push-Pull Inverter With A New Cascaded Coil Flux Control For Induction Heating ApplicationsDocument7 pagesA Current-Fed Parallel Resonant Push-Pull Inverter With A New Cascaded Coil Flux Control For Induction Heating ApplicationsLuiz Daniel S. BezerraNo ratings yet
- TD1410 TechcodeDocument15 pagesTD1410 TechcodegrooyoNo ratings yet
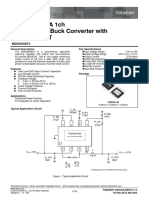
- 4.2V To 18V, 3A 1ch Synchronous Buck Converter With Integrated FETDocument22 pages4.2V To 18V, 3A 1ch Synchronous Buck Converter With Integrated FETDouglas BeltránNo ratings yet
- Design of Various Power Converters Using Circuit Simulator Applet - FalstadDocument2 pagesDesign of Various Power Converters Using Circuit Simulator Applet - FalstadKANNAN MANINo ratings yet
- 00960a PDFDocument20 pages00960a PDFrosaNo ratings yet
- FYP Bus Tracking SystemDocument41 pagesFYP Bus Tracking SystemMuhammad JameelNo ratings yet
- FP 6321Document11 pagesFP 6321Ahmed HussainNo ratings yet
- Buck ConverterDocument46 pagesBuck ConverterSurya PrakashNo ratings yet
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)