You might also like
- Lect 1 IntroDocument22 pagesLect 1 IntroakozyNo ratings yet
- Introduction To Nonlinear Control Lecture # 1 PreliminariesDocument62 pagesIntroduction To Nonlinear Control Lecture # 1 PreliminariesSaad HayatNo ratings yet
- Notes 220 17 PDFDocument88 pagesNotes 220 17 PDFRobin BrownNo ratings yet
- Nonlinear Systems and Control Lecture # 3 Second-Order SystemsDocument16 pagesNonlinear Systems and Control Lecture # 3 Second-Order SystemsMohtashimAliKazmiNo ratings yet
- Nonlinear Control Theory: Introduction To Dynamical SystemsDocument43 pagesNonlinear Control Theory: Introduction To Dynamical SystemsChernet TugeNo ratings yet
- Manifolds, Vector Fields & Flows: Harry G. KwatnyDocument40 pagesManifolds, Vector Fields & Flows: Harry G. KwatnyChernet TugeNo ratings yet
- CH 1Document16 pagesCH 1SAYED JAVED ALI SHAHNo ratings yet
- James NotesDocument83 pagesJames NotesUmer HuzaifaNo ratings yet
- Dynamical Systems: An LTCC CourseDocument53 pagesDynamical Systems: An LTCC CourseRoy VeseyNo ratings yet
- Nonlinear Systems and Control Lecture # 7 Stability of Equilibrium Points Basic Concepts & LinearizationDocument19 pagesNonlinear Systems and Control Lecture # 7 Stability of Equilibrium Points Basic Concepts & LinearizationNguyen Trong TaiNo ratings yet
- Higher Order Derivatives and Taylor Expansions: ExampleDocument4 pagesHigher Order Derivatives and Taylor Expansions: ExampleNorazrizal Aswad Abdul RahmanNo ratings yet
- Khalil - Nonlinear Systems SlidesDocument628 pagesKhalil - Nonlinear Systems SlidesAndre Gomes88% (8)
- Ds 6Document10 pagesDs 6Giozy OradeaNo ratings yet
- Economics 600: Department of Economics University of MarylandDocument15 pagesEconomics 600: Department of Economics University of MarylandrokhannnNo ratings yet
- Dynamical SystemsDocument98 pagesDynamical Systemscharmingcf100% (1)
- Art Aschenbrenner Van Der Dries 1 PDFDocument33 pagesArt Aschenbrenner Van Der Dries 1 PDFfugaperuNo ratings yet
- Theory of ODE - HuDocument67 pagesTheory of ODE - HuFavio90No ratings yet
- Definition of Natural Logarithm Function: The Fundamental Theorem of Calculus F.T.CDocument5 pagesDefinition of Natural Logarithm Function: The Fundamental Theorem of Calculus F.T.CChirag JainNo ratings yet
- Floquet Theory BasicsDocument3 pagesFloquet Theory BasicsPraneeth KumarNo ratings yet
- Optimality Conditions: Unconstrained Optimization: 1.1 Differentiable ProblemsDocument10 pagesOptimality Conditions: Unconstrained Optimization: 1.1 Differentiable ProblemsmaryNo ratings yet
- The Random Variable Transformation (R.V.T.) : A Method For Computing The 1-p.d.f. Applications To ModellingDocument76 pagesThe Random Variable Transformation (R.V.T.) : A Method For Computing The 1-p.d.f. Applications To ModellingAinhoa AzorinNo ratings yet
- Stationary Points Minima and Maxima Gradient MethodDocument8 pagesStationary Points Minima and Maxima Gradient MethodmanojituuuNo ratings yet
- Unit 17: Taylor Approximation: Math 22ADocument4 pagesUnit 17: Taylor Approximation: Math 22ATahzeeb AhmedNo ratings yet
- Ma1505 CheatDocument4 pagesMa1505 CheatSouseiseki ChromeNo ratings yet
- IB Mathematical Methods II Part 1 of 6 (Cambridge)Document4 pagesIB Mathematical Methods II Part 1 of 6 (Cambridge)ucaptd3No ratings yet
- Lect - 22 KhalilDocument17 pagesLect - 22 KhalilDaniel AmbrizNo ratings yet
- Uniform Continuity of Sinc XDocument8 pagesUniform Continuity of Sinc XOmaar Mustaine RattleheadNo ratings yet
- Lecture6 06Document7 pagesLecture6 06dries siehersmaNo ratings yet
- Information Theory Differential EntropyDocument29 pagesInformation Theory Differential EntropyGaneshkumarmuthurajNo ratings yet
- Fourier Electrical Circuits PDFDocument18 pagesFourier Electrical Circuits PDFCharmaine CuynoNo ratings yet
- 285 Exam3 ReviewProblems 2012 SpringDocument23 pages285 Exam3 ReviewProblems 2012 SpringAnurag SinghNo ratings yet
- Linear Systems: Dr. T. PhaneendraDocument7 pagesLinear Systems: Dr. T. PhaneendraParth VijayNo ratings yet
- Waveequation1 PDFDocument27 pagesWaveequation1 PDFAndrian RussuNo ratings yet
- Nonlinear Control Systems - Lecture 1 - August 23, 2005: Rium Points of The Vector Field, Studying The Stability of TheDocument2 pagesNonlinear Control Systems - Lecture 1 - August 23, 2005: Rium Points of The Vector Field, Studying The Stability of TheMagdy RomanNo ratings yet
- Ejercicios Con Una Formula RaraDocument23 pagesEjercicios Con Una Formula RaraDavid NiceDethNo ratings yet
- Conservation PDFDocument27 pagesConservation PDFCarlos Alberto Dutra Fraga FilhoNo ratings yet
- Distributions and Normal Random VariablesDocument8 pagesDistributions and Normal Random Variablesaurelio.fdezNo ratings yet
- Introduction To The Topology of Continuous Dynamical Systems Andries Smith 1. Continuous General Dynamical SystemsDocument13 pagesIntroduction To The Topology of Continuous Dynamical Systems Andries Smith 1. Continuous General Dynamical SystemsEpic WinNo ratings yet
- Existence Theory and Properties of Solutions: TH (N) (N THDocument24 pagesExistence Theory and Properties of Solutions: TH (N) (N THGeof180No ratings yet
- MIT14 381F13 Lec1 PDFDocument8 pagesMIT14 381F13 Lec1 PDFDevendraReddyPoreddyNo ratings yet
- Lecture 1Document8 pagesLecture 1Chernet TugeNo ratings yet
- Chapter 2 Stationarity, Spectral Theorem, Ergodic Theorem (Lecture On 01-07-2021) - STAT 243 - Stochastic ProcessDocument4 pagesChapter 2 Stationarity, Spectral Theorem, Ergodic Theorem (Lecture On 01-07-2021) - STAT 243 - Stochastic ProcessProf. Madya Dr. Umar Yusuf MadakiNo ratings yet
- Joint Normal RvsDocument4 pagesJoint Normal RvshacktomNo ratings yet
- Multivariable Calculus: Inverse-Implicit Function Theorems: N N M F XDocument11 pagesMultivariable Calculus: Inverse-Implicit Function Theorems: N N M F XSlaven IvanovicNo ratings yet
- Review of Probability TheoryDocument8 pagesReview of Probability Theorygirithik14No ratings yet
- Second Order Partial Derivatives The Hessian Matrix Minima and MaximaDocument12 pagesSecond Order Partial Derivatives The Hessian Matrix Minima and MaximaSyed Wajahat AliNo ratings yet
- Partial DerivativeDocument71 pagesPartial Derivative9898171006No ratings yet
- Mvcalc Notes 2018 v2Document39 pagesMvcalc Notes 2018 v2Matthew LewingtonNo ratings yet
- DsDocument24 pagesDsPop RobertNo ratings yet
- Check Continuity of Functions and Determine DiscontinuitiesDocument3 pagesCheck Continuity of Functions and Determine Discontinuitiesksr131No ratings yet
- Exponential Stability of Nonlinear Time-Varying Differential Equations and ApplicationsDocument13 pagesExponential Stability of Nonlinear Time-Varying Differential Equations and ApplicationsHo Nhat NamNo ratings yet
- Differentiabilitate I+IIDocument64 pagesDifferentiabilitate I+IIVlad BuldurNo ratings yet
- Calculus To First ExamDocument9 pagesCalculus To First ExamSteven WalkerNo ratings yet
- Fourier TheoremDocument8 pagesFourier TheoremGauravNo ratings yet
- 2021 Spring Nonlinear Techniques For Nonlinear Dispersive PDEs 4Document10 pages2021 Spring Nonlinear Techniques For Nonlinear Dispersive PDEs 4chejianglongNo ratings yet
- School of Mathematics and Physics, The University of QueenslandDocument1 pageSchool of Mathematics and Physics, The University of QueenslandVincent LiuNo ratings yet
- DerivativesDocument20 pagesDerivativesWho CaresNo ratings yet
- Limits Formulae Standard Formulae of LimitsDocument5 pagesLimits Formulae Standard Formulae of Limitstesttry13No ratings yet
- Quadratic Mean Differentiability ExampleDocument5 pagesQuadratic Mean Differentiability ExamplemamurtazaNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Part 2.the Fourier TransformDocument38 pagesPart 2.the Fourier TransformChernet TugeNo ratings yet
- Economic Model and Stability in The Sense of LyapunvDocument20 pagesEconomic Model and Stability in The Sense of LyapunvChernet TugeNo ratings yet
- Lecture 8. Linear Systems of Differential EquationsDocument4 pagesLecture 8. Linear Systems of Differential EquationsChernet TugeNo ratings yet
- Some Immunological Test: Presented by Alaa Faeiz Ashwaaq Dyaa Aseel Abd AL-Razaq Supervised by D.FerasDocument33 pagesSome Immunological Test: Presented by Alaa Faeiz Ashwaaq Dyaa Aseel Abd AL-Razaq Supervised by D.FerasChernet TugeNo ratings yet
- Block Diagram Representation2Document74 pagesBlock Diagram Representation2Chernet TugeNo ratings yet
- Peer LearningDocument16 pagesPeer LearningChernet Tuge100% (1)
- L Yap Fun C ConstructDocument3 pagesL Yap Fun C ConstructChernet TugeNo ratings yet
- Kinematic Control of Wheeled Mobile Robots: L. Gracia and J. TorneroDocument10 pagesKinematic Control of Wheeled Mobile Robots: L. Gracia and J. TorneroChernet TugeNo ratings yet
- 19.1 Complex ExponentsDocument2 pages19.1 Complex ExponentsChernet TugeNo ratings yet
- 25.1 Contour IntegralsDocument4 pages25.1 Contour IntegralsChernet TugeNo ratings yet
- Rigid BodyDocument9 pagesRigid BodyChernet TugeNo ratings yet
- Intelligent Simulation of Multibody Dynamics: Space-State and Descriptor Methods in Sequential and Parallel Computing EnvironmentsDocument19 pagesIntelligent Simulation of Multibody Dynamics: Space-State and Descriptor Methods in Sequential and Parallel Computing EnvironmentsChernet TugeNo ratings yet
- A Practical Approach For Motion Planning of Wheeled Mobile RobotsDocument11 pagesA Practical Approach For Motion Planning of Wheeled Mobile RobotsChernet TugeNo ratings yet
- Hilbert-Spaces MATH231B Appendix1of1Document28 pagesHilbert-Spaces MATH231B Appendix1of1Chernet TugeNo ratings yet
- 50 Input Output Practice Questions 1606810110009 OBDocument17 pages50 Input Output Practice Questions 1606810110009 OBJavid QuadirNo ratings yet
- Fire InvestigationDocument126 pagesFire InvestigationAbcede IloiloNo ratings yet
- Midterm BUS510Document8 pagesMidterm BUS510Ramesh KomarapuriNo ratings yet
- Netxknx Opc 3 - 5 - 4 EngDocument93 pagesNetxknx Opc 3 - 5 - 4 Engtai_sao_khong_1307No ratings yet
- High-Strength Stainless Steels With "Microduplex" Structure For Cryogenic ApplicationsDocument3 pagesHigh-Strength Stainless Steels With "Microduplex" Structure For Cryogenic ApplicationsakhileshNo ratings yet
- HSSC G PhysicsDocument78 pagesHSSC G Physicshasnain ghazalaNo ratings yet
- IIEE La Union Harmonics AnalysisDocument128 pagesIIEE La Union Harmonics AnalysisCarlnagum 123456789No ratings yet
- S ParametersDocument29 pagesS ParameterseloiseNo ratings yet
- Numerical Methods in Rock Mechanics - 2002 - International Journal of Rock Mechanics and Mining SciencesDocument19 pagesNumerical Methods in Rock Mechanics - 2002 - International Journal of Rock Mechanics and Mining SciencesAnderson Lincol Condori PaytanNo ratings yet
- Camshaft Recommendation FormDocument3 pagesCamshaft Recommendation Formcrower_scribdNo ratings yet
- Plate Fin Heat ExchangerDocument14 pagesPlate Fin Heat ExchangerTushar PanchalNo ratings yet
- Fatigue Life Prediction - An Overview - ScienceDirect TopicsDocument14 pagesFatigue Life Prediction - An Overview - ScienceDirect TopicsMohamed AlaaElDinNo ratings yet
- Measurement of Earthing Systems: Central Networks Earthing Manual Section E4Document45 pagesMeasurement of Earthing Systems: Central Networks Earthing Manual Section E4ahmed_k7117No ratings yet
- Oracle Database 11g Transparent Data EncryptionDocument40 pagesOracle Database 11g Transparent Data EncryptionYelena BytenskayaNo ratings yet
- CoolebrookDocument31 pagesCoolebrookloganatahnNo ratings yet
- MSC Academic Guide - Admission Test PDFDocument13 pagesMSC Academic Guide - Admission Test PDFTonoy Peter CorrayaNo ratings yet
- Instruction For Lab Practice: 5. No Cancellation of Booked Slot Is Allowed This TimeDocument12 pagesInstruction For Lab Practice: 5. No Cancellation of Booked Slot Is Allowed This Timebalaji817150No ratings yet
- Register Transfer LanguageDocument11 pagesRegister Transfer LanguageShiva IdokNo ratings yet
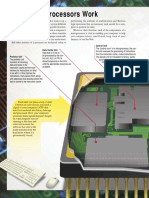
- How Microprocessors Work PDFDocument2 pagesHow Microprocessors Work PDFdanielconstantin4No ratings yet
- JAVA NotesDocument12 pagesJAVA NotesVarun BawaNo ratings yet
- VI. HelicoptersDocument147 pagesVI. HelicopterssreekanthNo ratings yet
- Atmos S 351 - Service ManualDocument40 pagesAtmos S 351 - Service ManualcuetlaxochitlNo ratings yet
- Lab 3 Pre LabDocument3 pagesLab 3 Pre LabMina VoNo ratings yet
- Adjectives 4Document34 pagesAdjectives 4Delia Bolasoc100% (1)
- DTC P1200 Fuel Pump Relay/ECU Circuit MalfunctionDocument4 pagesDTC P1200 Fuel Pump Relay/ECU Circuit MalfunctiononealNo ratings yet
- Cost Center Budget Availability Control - S - 4 HANA 1909Document24 pagesCost Center Budget Availability Control - S - 4 HANA 1909sekhar dattaNo ratings yet
- Concrete Mix DesignDocument11 pagesConcrete Mix DesignV Vinoth Edac100% (1)
- Configuring Routing by Using Routing and Remote AccessDocument31 pagesConfiguring Routing by Using Routing and Remote AccessLacus ClyneNo ratings yet
- Free Computer Fundamentals and Programming in C by Reema TharejaDocument5 pagesFree Computer Fundamentals and Programming in C by Reema TharejaGopi S0% (1)
- SQL1Document13 pagesSQL1Devalla Bhaskar GaneshNo ratings yet