You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- First Science Encyclopedia (PDFDrive)Document138 pagesFirst Science Encyclopedia (PDFDrive)KAYALVIZHI A/P KUNASEGARAN Moe100% (6)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- EMI Filter DesignDocument320 pagesEMI Filter Designusmancheema81100% (6)
- TyroliaDocument89 pagesTyroliadramljak760167% (3)
- 5e Lesson Plan - Freezing and MeltingDocument7 pages5e Lesson Plan - Freezing and Meltingapi-253494496100% (3)
- Purposive Communication Mid-Term Departmental ExamDocument4 pagesPurposive Communication Mid-Term Departmental ExamFerdinand Pinon90% (20)
- Hass - VN Astm c1693Document7 pagesHass - VN Astm c1693الملك فاروقNo ratings yet
- 4 - MTD 2015 Volume 1 ResmiresDocument9 pages4 - MTD 2015 Volume 1 Resmiresdaniel rezmiresNo ratings yet
- SOLUTION TO DESCRIBE THE INTERNAL KINEMATICS IN BALL BEARINGS WITH 4 TO 6 CONTACT POINTS. Rezmires Daniel EtcDocument2 pagesSOLUTION TO DESCRIBE THE INTERNAL KINEMATICS IN BALL BEARINGS WITH 4 TO 6 CONTACT POINTS. Rezmires Daniel Etcdaniel rezmiresNo ratings yet
- Rima Spa - Eng - Electronic - V2010 - OkDocument66 pagesRima Spa - Eng - Electronic - V2010 - Okdaniel rezmiresNo ratings yet
- Qed - Sirca - RIMA - Presentation - Inventica 2010 - IasiDocument5 pagesQed - Sirca - RIMA - Presentation - Inventica 2010 - Iasidaniel rezmiresNo ratings yet
- Free Angle of MissalignmentDocument4 pagesFree Angle of Missalignmentdaniel rezmiresNo ratings yet
- Slewing Rings Bearing Lubrication and MaintenanceDocument8 pagesSlewing Rings Bearing Lubrication and Maintenancedaniel rezmiresNo ratings yet
- The Load Distribution in Double Row Spherical Roller Bearings and Spherical Roller Bearings Systems in The Static CaseDocument12 pagesThe Load Distribution in Double Row Spherical Roller Bearings and Spherical Roller Bearings Systems in The Static Casedaniel rezmiresNo ratings yet
- The Radial and Axial Stiffnesses of Spherical Roller Bearing SystemDocument10 pagesThe Radial and Axial Stiffnesses of Spherical Roller Bearing Systemdaniel rezmiresNo ratings yet
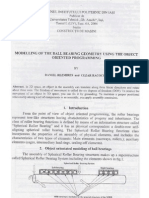
- Modelling The Ball Bearing Geometry Using The Object Oriented ProgrammingDocument6 pagesModelling The Ball Bearing Geometry Using The Object Oriented Programmingdaniel rezmiresNo ratings yet
- Hertzian and Non Hertzian Contact Analisys in Ball BearingsDocument4 pagesHertzian and Non Hertzian Contact Analisys in Ball Bearingsdaniel rezmiresNo ratings yet
- The Diametral Clearance Repartition in Single Row Ball Barings With 2, 3 or 4 Point ContactDocument5 pagesThe Diametral Clearance Repartition in Single Row Ball Barings With 2, 3 or 4 Point Contactdaniel rezmires100% (1)
- Sirca - Eng - Electronic - V2010-Ok Slewing Rings Bearing Catalogue Bearing ManufacturerDocument66 pagesSirca - Eng - Electronic - V2010-Ok Slewing Rings Bearing Catalogue Bearing Manufacturerdaniel rezmiresNo ratings yet
- Assignment 3 Business IntelligenceDocument4 pagesAssignment 3 Business IntelligencerebornphenNo ratings yet
- Soft-Start Circuits For LDO Linear RegulatorsDocument4 pagesSoft-Start Circuits For LDO Linear RegulatorsCharles FarhleyNo ratings yet
- Space Law - Common HeritageDocument33 pagesSpace Law - Common HeritageBailey SandersNo ratings yet
- Divorce MeenakshiDocument1 pageDivorce MeenakshiMeenakshi ThakurNo ratings yet
- Project FileDocument60 pagesProject FilesalmanNo ratings yet
- ch1 MathsDocument3 pagesch1 MathsgesNo ratings yet
- Supplier Evaluation 1Document6 pagesSupplier Evaluation 133286762No ratings yet
- Life Skills: Giving PresentationsDocument2 pagesLife Skills: Giving PresentationsВіта МоскаленкоNo ratings yet
- LED Flasher Circuit PPT PresentationDocument6 pagesLED Flasher Circuit PPT PresentationBharath100% (1)
- Benefit Speech TherapyDocument4 pagesBenefit Speech TherapyMoewardi KmkkNo ratings yet
- SD - Brunox (R) Epoxy Spray (NZ) 1Document10 pagesSD - Brunox (R) Epoxy Spray (NZ) 1uNo ratings yet
- Scada Pack 4000Document111 pagesScada Pack 4000Juan LuisNo ratings yet
- A Systematic Review of K-Means Algorithm Improvement Research For Data ClusteringDocument31 pagesA Systematic Review of K-Means Algorithm Improvement Research For Data ClusteringEdwardNo ratings yet
- THSISES Updated 27-02-2024Document75 pagesTHSISES Updated 27-02-2024Abiola segunNo ratings yet
- Chapter 1: Introduction To Engineering EconomyDocument9 pagesChapter 1: Introduction To Engineering EconomyFirdaus JamsanNo ratings yet
- The Effect of Dividend Policy On Stock Price: Evidence From The Indian MarketDocument9 pagesThe Effect of Dividend Policy On Stock Price: Evidence From The Indian MarketWilson SimbaNo ratings yet
- Competency Based Learning MethodDocument22 pagesCompetency Based Learning MethodFrank Michael Jacla75% (4)
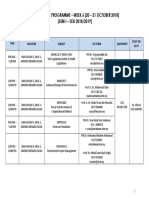
- Timetable For Offshore Programme - Week 6 (20 - 21 October 2018) (SEM I - SESI 2018/2019)Document6 pagesTimetable For Offshore Programme - Week 6 (20 - 21 October 2018) (SEM I - SESI 2018/2019)Mohd Kazi Abd RahmanNo ratings yet
- VCTDS-01042 Models Y1 BV-1 RA-Blanketing Regulator-EnDocument6 pagesVCTDS-01042 Models Y1 BV-1 RA-Blanketing Regulator-EnvipinNo ratings yet
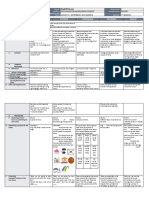
- DLL - English 5 - Q1 - W2Document9 pagesDLL - English 5 - Q1 - W2Mary Joe S. MericueloNo ratings yet
- Vapourizer PhysicsDocument68 pagesVapourizer Physicssamrox54100% (2)
- Chapter 4Document29 pagesChapter 4Jelan AlanoNo ratings yet
- First Monthly Long Quiz English 10 A. Directions:Put A Check Mark (An "X" Mark (X) If It Doesn't. Use Another Sheet of PaperDocument3 pagesFirst Monthly Long Quiz English 10 A. Directions:Put A Check Mark (An "X" Mark (X) If It Doesn't. Use Another Sheet of PaperCync KlayNo ratings yet
- DC250 Tech Info SheetsDocument16 pagesDC250 Tech Info SheetsChenna VijayNo ratings yet