You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- General Dynamics F-16 Fighting Falcon - Wikipedia, The Free EncyclopediaDocument28 pagesGeneral Dynamics F-16 Fighting Falcon - Wikipedia, The Free EncyclopediaJulie MerrillNo ratings yet
- OSCEs For Dentistry Third Edition-With-AnswersDocument365 pagesOSCEs For Dentistry Third Edition-With-AnswersAnkita Arora100% (6)
- Assurance Question Bank 2013 PDFDocument168 pagesAssurance Question Bank 2013 PDFIan RelacionNo ratings yet
- 2022 Consumer Trends ReportDocument29 pages2022 Consumer Trends Reportadelin litan100% (1)
- LP Exemplar in English 9 Verbal and Non VerbalDocument3 pagesLP Exemplar in English 9 Verbal and Non VerbalBaby Lyn Oamil EusebioNo ratings yet
- Applied Parameter Estimation For Chemical Engineers (Chemical Industries) by Peter Englezos (Anexo1)Document21 pagesApplied Parameter Estimation For Chemical Engineers (Chemical Industries) by Peter Englezos (Anexo1)cegarcia0% (1)
- Salario en Informatica 2010Document0 pagesSalario en Informatica 2010cegarciaNo ratings yet
- CPP Reference SheetDocument1 pageCPP Reference SheetAlfred FredNo ratings yet
- Colección de Libros de SkillsoftDocument4 pagesColección de Libros de SkillsoftcegarciaNo ratings yet
- Plastics TechnologyDocument10 pagesPlastics TechnologyaaandinNo ratings yet
- B 0112005007Document3 pagesB 0112005007researchinventyNo ratings yet
- 1501.applied Parameter Estimation For Chemical Engineers (Chemical Industries) by Peter Englezos (Cap18)Document38 pages1501.applied Parameter Estimation For Chemical Engineers (Chemical Industries) by Peter Englezos (Cap18)cegarciaNo ratings yet
- AntChapter1 PDFDocument8 pagesAntChapter1 PDFferi0kurniawan-1No ratings yet
- How To Study in College (10 Tips)Document7 pagesHow To Study in College (10 Tips)cegarcia0% (1)
- Engineers (Chemical Industries) by Peter Englezos (Cap 17)Document31 pagesEngineers (Chemical Industries) by Peter Englezos (Cap 17)cegarciaNo ratings yet
- Computing As EngineeringDocument17 pagesComputing As EngineeringcegarciaNo ratings yet
- Cap 16Document37 pagesCap 16rarunr1No ratings yet
- Other Nonlinear Regression Methods For Algebraic ModelsDocument17 pagesOther Nonlinear Regression Methods For Algebraic ModelscegarciaNo ratings yet
- Engineers (Chemical Industries) by Peter Englezos (Cap 15)Document17 pagesEngineers (Chemical Industries) by Peter Englezos (Cap 15)cegarciaNo ratings yet
- Ingeniería QuímicaDocument12 pagesIngeniería QuímicacegarciaNo ratings yet
- Recursive Parameter Estimation: in This Chapter We Present Very Briefly The Basic Algorithm For Recursive LeastDocument8 pagesRecursive Parameter Estimation: in This Chapter We Present Very Briefly The Basic Algorithm For Recursive Leastrarunr1No ratings yet
- Cap 14Document42 pagesCap 14rarunr1No ratings yet
- Engineers (Chemical Industries) by Peter Englezos (Cap 7)Document18 pagesEngineers (Chemical Industries) by Peter Englezos (Cap 7)cegarciaNo ratings yet
- Engineers (Chemical Industries) by Peter Englezos (Cap 9)Document9 pagesEngineers (Chemical Industries) by Peter Englezos (Cap 9)cegarciaNo ratings yet
- 1501.applied Parameter Estimation For Chemical Engineers (Chemical Industries) by Peter Englezos (Cap 1)Document6 pages1501.applied Parameter Estimation For Chemical Engineers (Chemical Industries) by Peter Englezos (Cap 1)cegarcia0% (1)
- Gauss-Newton Method For Algebraic Models: As Seen in Chapter 2 A Suitable Measure of The Discrepancy Between A ModelDocument18 pagesGauss-Newton Method For Algebraic Models: As Seen in Chapter 2 A Suitable Measure of The Discrepancy Between A ModelcegarciaNo ratings yet
- DK5985 - Ch08engineers (Chemical Industries) by Peter Englezos (Cap 8)Document25 pagesDK5985 - Ch08engineers (Chemical Industries) by Peter Englezos (Cap 8)cegarciaNo ratings yet
- Design of Experiments: There Are Many Books That Address Experimental Design and Present FactoDocument33 pagesDesign of Experiments: There Are Many Books That Address Experimental Design and Present Factorarunr1No ratings yet
- Computation of Parameters in Linear Models - Linear RegressionDocument26 pagesComputation of Parameters in Linear Models - Linear RegressioncegarciaNo ratings yet
- I, Sim-Are You Living in A Computer SimulationDocument47 pagesI, Sim-Are You Living in A Computer SimulationcegarciaNo ratings yet
- Critical Review of Simulation-Based Medical Education Research, 2003-2009Document14 pagesCritical Review of Simulation-Based Medical Education Research, 2003-2009cegarcia100% (1)
- Ejemplo2 de Simulación Con SimNet IIDocument13 pagesEjemplo2 de Simulación Con SimNet IIcegarciaNo ratings yet
- Formulation of The Parameter Estimation: ProblemDocument16 pagesFormulation of The Parameter Estimation: ProblemcegarciaNo ratings yet
- 1814 d01 PDFDocument20 pages1814 d01 PDFteletrabbiesNo ratings yet
- Ej18 DetailsDocument6 pagesEj18 Detailsdaniel FerreiraNo ratings yet
- Iit Ashram: Guj - Board Pattern Test-7Document6 pagesIit Ashram: Guj - Board Pattern Test-7rult007No ratings yet
- Class Record (Science 9) S.Y. 2020-2021Document8 pagesClass Record (Science 9) S.Y. 2020-2021Wilmar EspinosaNo ratings yet
- PDFDocument478 pagesPDFPriyaranjan PradhanNo ratings yet
- Latin Fathers On Spirit PDFDocument20 pagesLatin Fathers On Spirit PDFZakka LabibNo ratings yet
- Accounting for Inventory Valuation Methods Research ProposalDocument66 pagesAccounting for Inventory Valuation Methods Research ProposalAyman Ahmed Cheema100% (1)
- List of NgosDocument97 pagesList of Ngosjaivikpatel11No ratings yet
- DTMF Relay and Interworking On CUBE PDFDocument18 pagesDTMF Relay and Interworking On CUBE PDFEngin KartalNo ratings yet
- Basic Sciences: Home MCQ's DiscussionsDocument10 pagesBasic Sciences: Home MCQ's Discussionsdileep9002392No ratings yet
- Scalable Machine-Learning Algorithms For Big Data Analytics: A Comprehensive ReviewDocument21 pagesScalable Machine-Learning Algorithms For Big Data Analytics: A Comprehensive ReviewvikasbhowateNo ratings yet
- 1 HeterogenitasDocument46 pages1 HeterogenitasRani JuliariniNo ratings yet
- Bringing Class to Mass: L'Oreal's Plénitude Line Struggles in the USDocument36 pagesBringing Class to Mass: L'Oreal's Plénitude Line Struggles in the USLeejat Kumar PradhanNo ratings yet
- Conference Flyer ChosenDocument4 pagesConference Flyer ChosenOluwatobi OgunfoworaNo ratings yet
- Anatomija Za Umetnike PDFDocument4 pagesAnatomija Za Umetnike PDFДанило ВујачићNo ratings yet
- Unit 2 GEC 106Document132 pagesUnit 2 GEC 106fernando.gl559No ratings yet
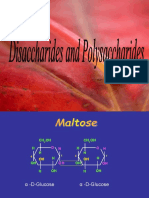
- Disaccharides and PolysaccharidesDocument17 pagesDisaccharides and PolysaccharidesAarthi shreeNo ratings yet
- Papadaki 2017Document7 pagesPapadaki 2017Teresa MataNo ratings yet
- Soften, Soothe, AllowDocument1 pageSoften, Soothe, AllowTatiannaMartinsNo ratings yet
- Spent Caustic Recycle at Farleigh MillDocument9 pagesSpent Caustic Recycle at Farleigh MillyamakunNo ratings yet
- Learning and Teaching in The Clinical EnvironmentDocument4 pagesLearning and Teaching in The Clinical EnvironmentDaniel Alejandro Lozano MorenoNo ratings yet
- Landmark Church School WBSDocument4 pagesLandmark Church School WBSbayoNo ratings yet
- RGB PDFDocument35 pagesRGB PDFGestion Medios Zamba ColorsNo ratings yet
- Rexsteel English72Document10 pagesRexsteel English72Bogie Prastowo MahardhikaNo ratings yet
- Body Condition Scoring of Dairy Cattle A Review - 2 PDFDocument8 pagesBody Condition Scoring of Dairy Cattle A Review - 2 PDFfrankyNo ratings yet