You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- L100w6-Gey Parts ManualDocument28 pagesL100w6-Gey Parts ManualFlavio MedranoNo ratings yet
- 6ch-Wute Parts ManualDocument100 pages6ch-Wute Parts ManualFlavio MedranoNo ratings yet
- Shielding RF Components at The Package LeveDocument12 pagesShielding RF Components at The Package LeveSebastian ReguanNo ratings yet
- Salesforce Naming ConventionsDocument25 pagesSalesforce Naming ConventionsRamNo ratings yet
- V158ti 180ti 222ti - Ad158ti 180ti 222tiDocument185 pagesV158ti 180ti 222ti - Ad158ti 180ti 222tiFlavio MedranoNo ratings yet
- What Is PETDocument7 pagesWhat Is PETAza_AzlinAizri_2765No ratings yet
- Iso 3601 1 2012Document13 pagesIso 3601 1 2012Emiliya EmiliyaNo ratings yet
- Introduction To Production and Operations ManagementDocument17 pagesIntroduction To Production and Operations ManagementSyed M. Fakharullah KazmiNo ratings yet
- SAP Business OneDocument8 pagesSAP Business OneCrave InfotechNo ratings yet
- Pooltrading Advance mb242 21Document2 pagesPooltrading Advance mb242 21Flavio MedranoNo ratings yet
- MITSUBISHI GENSET MGS1400B-60Hz-480vDocument4 pagesMITSUBISHI GENSET MGS1400B-60Hz-480vFlavio MedranoNo ratings yet
- MITSUBISHI GENSET MGS2000B-50Hz-380VDocument4 pagesMITSUBISHI GENSET MGS2000B-50Hz-380VFlavio MedranoNo ratings yet
- 2022 YANMAR-Promo Catalogus - LRDocument40 pages2022 YANMAR-Promo Catalogus - LRFlavio MedranoNo ratings yet
- PS820-830 CodingDocument1 pagePS820-830 CodingFlavio MedranoNo ratings yet
- Catalog of Diesel EngineDocument6 pagesCatalog of Diesel EngineFlavio MedranoNo ratings yet
- 6LPA Series - : Stp2 / STCDocument2 pages6LPA Series - : Stp2 / STCFlavio MedranoNo ratings yet
- Catalog of Diesel GeneratorDocument6 pagesCatalog of Diesel GeneratorFlavio MedranoNo ratings yet
- Parts Catalog: 0CB10-M61201ENDocument25 pagesParts Catalog: 0CB10-M61201ENFlavio MedranoNo ratings yet
- 4LHA Series - : HTP / DTP / STPDocument2 pages4LHA Series - : HTP / DTP / STPFlavio MedranoNo ratings yet
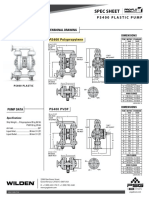
- Spec Sheet: Ps400 Plastic Pump 38 MM (1-1/2") Pump Maximum Flow Rate: 458 LPM (121 GPM)Document2 pagesSpec Sheet: Ps400 Plastic Pump 38 MM (1-1/2") Pump Maximum Flow Rate: 458 LPM (121 GPM)Flavio MedranoNo ratings yet
- Petroleum 8: 2" X 2" Self Priming Centrifugal PumpDocument7 pagesPetroleum 8: 2" X 2" Self Priming Centrifugal PumpFlavio MedranoNo ratings yet
- Diesel Engines For Alamarin-Jet 180 - 185 Rev3-6Document4 pagesDiesel Engines For Alamarin-Jet 180 - 185 Rev3-6Flavio MedranoNo ratings yet
- Diesel Engines For Alamarin-Jet 288-285 Rev7-4Document7 pagesDiesel Engines For Alamarin-Jet 288-285 Rev7-4Flavio MedranoNo ratings yet
- Diesel Engines For Alamarin-Jet 245 Rev.3.3Document5 pagesDiesel Engines For Alamarin-Jet 245 Rev.3.3Flavio MedranoNo ratings yet
- Selection Tables VETUS-YANMAR 2019 EN LandscapeDocument4 pagesSelection Tables VETUS-YANMAR 2019 EN LandscapeFlavio MedranoNo ratings yet
- Diesel Engines For Alamarin-Jet 160 Rev 3-2Document2 pagesDiesel Engines For Alamarin-Jet 160 Rev 3-2Flavio MedranoNo ratings yet
- Carter Products Jet Bandsaw Guide Conversion Kit Installation InstructionsDocument2 pagesCarter Products Jet Bandsaw Guide Conversion Kit Installation Instructionstravis_gant3547No ratings yet
- Strima TWB 06 PDFDocument1 pageStrima TWB 06 PDFaleksandra_krzn5246No ratings yet
- 11g Partitioning Features Part2Document4 pages11g Partitioning Features Part2Ashok ThiyagarajanNo ratings yet
- Wilderness 1500 X Study Plans Complete A 4Document29 pagesWilderness 1500 X Study Plans Complete A 4Anonymous eiCiKcVkNo ratings yet
- A33CEDocument4 pagesA33CEfausstrollNo ratings yet
- CHALLANGES of Organizational DesignDocument30 pagesCHALLANGES of Organizational DesignRabia Yasmeen100% (1)
- Autodesk 04-10-2011Document336 pagesAutodesk 04-10-2011Vladimir ShulinNo ratings yet
- Eaton Fuller Heavy-Duty Transmissions TRDR0400: Driver InstructionsDocument24 pagesEaton Fuller Heavy-Duty Transmissions TRDR0400: Driver InstructionsGeorge BuitragoNo ratings yet
- GlobalSample Pakistan ExportDocument6 pagesGlobalSample Pakistan ExportFarhan WahidNo ratings yet
- ISO 9001 - ISO 14001 - ISO 27001 Online Training - AdviseraDocument18 pagesISO 9001 - ISO 14001 - ISO 27001 Online Training - AdviseramnamkyNo ratings yet
- Kartal Urban DesignDocument73 pagesKartal Urban DesignkanipakNo ratings yet
- Tvs Project ReportDocument38 pagesTvs Project ReportAnkit Dubey100% (1)
- Marketingul MobileDocument8 pagesMarketingul MobileIuliana DimaNo ratings yet
- TITAN REPORT FinalDocument38 pagesTITAN REPORT FinalSiddharth Bagai100% (1)
- Planning & Scheduling of Residential Building Using MS ProjectDocument7 pagesPlanning & Scheduling of Residential Building Using MS ProjectLordgie AgtucaNo ratings yet
- MX2 Multi Function Manual en 201010Document463 pagesMX2 Multi Function Manual en 201010gori-rNo ratings yet
- ConneCtor PDA 2001 Data (Segmentation)Document24 pagesConneCtor PDA 2001 Data (Segmentation)Vivek AnandanNo ratings yet
- MM Standard ConfigurationDocument156 pagesMM Standard ConfigurationSUBHOJIT BANERJEENo ratings yet
- BADM 2301 Spring 2014 Lab 5Document19 pagesBADM 2301 Spring 2014 Lab 5chanyoung4951No ratings yet
- SIL Methodology: A Methodology For SIL Verification in Accordance With IEC 61508 and IEC 61511 RequirementsDocument24 pagesSIL Methodology: A Methodology For SIL Verification in Accordance With IEC 61508 and IEC 61511 Requirementsmdfaheem786No ratings yet
- Objectives: Sujith Sam Email: Mob Bangalore:+91 8553039459Document2 pagesObjectives: Sujith Sam Email: Mob Bangalore:+91 8553039459SAIBINNo ratings yet
- QMS DeclarationDocument3 pagesQMS DeclarationMuhammad Saqib AsifNo ratings yet
- Peram Sreenivasulu Reddy: M.C.A Form Velenkanni Institute of Computer Science, Nellore Under S.V.U WithDocument3 pagesPeram Sreenivasulu Reddy: M.C.A Form Velenkanni Institute of Computer Science, Nellore Under S.V.U WithperamsrinivasuluNo ratings yet