International Journal of Electronics and JOURNAL Communication Engineering & Technology (IJECET), ISSN 0976 INTERNATIONAL OF ELECTRONICS AND
D 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 5, September October (2013), IAEME
COMMUNICATION ENGINEERING & TECHNOLOGY (IJECET)
ISSN 0976 6464(Print) ISSN 0976 6472(Online) Volume 4, Issue 5, September October, 2013, pp. 218-224 IAEME: www.iaeme.com/ijecet.asp Journal Impact Factor (2013): 5.8896 (Calculated by GISI) www.jifactor.com
IJECET
IAEME
SELF ACCELERATED SMART PARTICLE SWARM OPTIMIZATION FOR NON LINEAR PROGRAMMING PROBLEMS
Anuradha L. Borkar1
1
Electronics and Telecommunication Dept. M S S S College of Engineering and Technology, Jalna, Maharashtra, India
ABSTRACT This paper presents Self Accelerated Smart Particle Swarm Optimization (SASPSO) for nonlinear programming problems (NLP). In SASPSO, the positions of particle are updated by pbest (Personal or local best) and gbest (Global best). The main advantages of SASPSO are that it doesnt require velocity equation. In addition, it does not require any additional parameter like acceleration coefficients and inertia weight as in case other PSO algorithms. Momentum factor is introduced in SASPSO which can prevent particles from out of defined region without checking the validity of positions at every iterations result in saving of computational cost. During the initial stages of the experimentation, the step size will be large and during the final stage of the experimentation, the step size is reduced to smaller value. The SASPSO is tested on global optimization problems such as Nonlinear Programming Problems (NLP). The results are compared with the Genetic Algorithm (GA). The results of SASPSO are good in terms of are accuracy of optimal solution and generations as compared GA. It also gives large number of possible optimal solutions as compared GA. Keywords: gbest(Global best), Nonlinear programming problems (NLP), pbest (Personal or local best), Self Accelerated Smart Particle Swarm Optimization (SASPSO). I. INTRODUCTION
Most of the real life problems occurring in the field of science and engineering may be modeled as Nonlinear programming (NLP), unimodal or multimodal optimization problems. Nonlinear programming is the process of solving a system of equalities and inequalities over a set of unknown real variables, along with an objective function to be maximized or minimized, where some of the constraints or the objective functions are nonlinear. No general algorithms exist for solving nonlinear programming problems. However for problems with certain suitable structures, efficient algorithms have been developed. It is possible to convert the given NLP into one in which these structures become visible.
218
International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 5, September October (2013), IAEME
Nonlinear programming problems, unimodal or multimodal problems are generally considered more difficult to solve as there exists several local and global optima. Effective optimization of nonlinear programming problems, multi-dimensional and multimodal function with faster convergence and good quality of solution is a challenging task. The high computational cost and demands for improving accuracy of global optima of nonlinear programming problems and multimodal functions have forced the researchers to develop efficient optimization techniques in terms of new, modified or hybrid soft computing techniques. John Holland conceived Genetic Algorithm (GA) in the mid 1970s [1]. GA is inspired by the principles of genetic evolution and mimics the reproduction behavior observed in biological populations. GA suffers from premature convergence when an individual that is fit than others at early stages dominates on the reproduction process leading to a local optimum convergence rather than a more thorough search that could have lead to a global optimum [1]. GA has been extensively applied to solve complex design optimization problems due its capability to handle constrain functions without requiring gradient information [1]. But the limitation of getting trapped in local minima and three step procedures of GA [1-2] such as selection, crossover and mutation increase the computational time and thus forced the researchers to search for more efficient optimization techniques. Particle Swarm Optimization (PSO) is a population-based optimization method developed by Eberhart and Kennedy in 1995. This method is inspired by social behavior of bird flocking or fish schooling. It can efficiently handle problems like nonlinear, unimodal and multimodal function optimizations [3]. . Compared to GA, PSO is easy to implement and converge faster with less memory requirement [4]. However, unlike GA, PSO has no evolution operators such as crossover and mutation. The new variants of PSO are proposed for faster convergence and better quality of optimum solution like Supervisor-Student Model in Particle Swarm Optimization (SSM-PSO) [5], Linear Decreasing Weight Particle Swarm Optimization (LDW-PSO) [6], Gregarious Particle Swarm Optimization (GPSO) [7], Global and Local Best Particle Swarm Optimization (GLBestPSO)[8] and Emotional Particle Swarm Optimization (EPSO)[9]. The author proposed Self Accelerated Smart Particle Swarm Optimization (SASPSO) for nonlinear programming problems (NLP). The rest of the paper is organized in four fold. The section II depicts the review of original Particle Swarm Optimization (PSO). The section III depicts the proposed method. In section IV, experimental results on nonlinear programming problems (NLP).by proposed method and other published techniques are presented. Section V comprises of conclusion. II REVIEW OF PARTICLE SWARM OPTIMIZATION
The original framework of PSO is designed by Kennedy and Eberhart in 1995. There fore, it is known as standard PSO [3]. PSO follows the optimization process by means of personal or local best (pi), global best (pg), particle position or displacement (X) and particle velocity (V). For each particle, at the current time step, a record is kept for the position, velocity, and the best position found in the search space. Each particle memorizes its previous velocity and the previous best position and uses them in its movements [3]. The velocities (V) of the particles are limited in [Vmin Vmax] D. If V is smaller than Vmin then V is set to Vmin or Xmin. If V greater than Vmax then V is set to Vmax or Xmax. Since the original version of PSO lacks velocity control mechanism, it has a poor ability to search at a fine grain. The two updating fundamental equations in a PSO are velocity and position equations, which are expressed as Eq. (1) and (2).
219
International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 5, September October (2013), IAEME
V id (t + 1) = V id ( t ) + c1 r1 d ( t ) ( p id ( t ) X id ( t )) + c 2 r2 d (t ) ( p gd (t ) X id ( t ))
(1) (2)
X id (t + 1) = X id (t ) +V id (t + 1)
Where, t= Current iteration or generation. i = Particle Number. d= Dimensions. Vid(t) = Velocity of i-th particle for d-dimension at iteration t. Xid (t) = Position of i-th particle for d-dimension at iteration t. c1 and c2= Acceleration constants. r1d (t) and r2d (t) = Random values [0 1] for d- dimension at iteration t. pid (t)= Personal or local best of i-th particle for d-dimension at iteration t. pgd (t) = Global best for d-dimension at iteration t.
The right side of Eq. (1) consists of three parts. The first part of equation is the previous velocity of the particle. The second part is the cognition (self-knowledge) or memory, which represents that the particle is attracted by its own previous best position and moving toward to it. The third part is the social (social knowledge) or cooperation, which represents that the particle is attracted by the best position so far in population and moving towards to it. There are restrictions among these three parts and can be used to determine the major performance of the algorithm. III SELF ACCELERATED SMART PARTICLE SWARM OPTIMIZATION (SASPSO)
The standard PSO suffers from following disadvantages. 1. 2. 3. 4. The swarm may prematurely converge when some poor particles attract the other particles or due to local optima or bad initialization It has problem dependent performance. No single parameter settings exists which can be applied to all problems. It requires tuning of parameters like c1, c2, w, iterations and swarm size Increasing the value of inertia weight w, increases the speed of the particles resulting in more global search and less local search. Decreasing the inertia weight slows down the speed of the particle resulting in more local search and less global search.
So to avoid the disadvantage of standard PSO, the author proposed a Self Accelerated Smart Particle Swarm Optimization (SASPSO). In SASPSO, the positions of particle are updated by pbest (Personal or local best) and gbest (Global best particle positions) as expressed in Eq. (3). The main advantages of SASPSO are that it doesnt require velocity equation. In addition, it does not require any additional parameter like acceleration coefficients and inertia weight as the case in other PSO algorithms. Momentum factor can prevent particles from out of defined region without checking the validity of positions at every iterations result in saving of computational cost. Xi(t+1)= Xi(t)+Mc*rand((Xi(t)- (gbest- pbesit))+( gbest-- pbesit)*rand) Where, t= Current iteration or generation. i = Particle Number. Xi (t) = Position of i-th particle for d-dimension at iteration t.
220
(3)
International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 5, September October (2013), IAEME
r1 and r2 = Random values [0 1] at iteration t. pbesit = Personal or local best of i-th particle at iteration t. Gbest = Global best at iteration t. Mc= Momentum Factor During the initial stages of the experimentation, the step size will be large and thus the positions of particles are away from the global best position. During the final stage of the experimentation, the step size is reduced to smaller value. Momentum factor can prevent particles from out of defined region without checking the validity of positions at every iterations result in saving of computational cost. IV EXPERIMENTAL RESULTS AND DISCUSSIONS
The Four Quadratic Programming Problems [10] as shown in Table 1 are used to validate performance of the Self Accelerated Smart Particle Swarm Optimization. The authors are considered both maximization and minimization functions to test efficiency of the SASPSO. The first and second problems are minimization problem and third and fourth problem is maximization problem. The solution by using Beales method [10] for each Quadratic Programming problem is presented in Table 1. The equation along with the constraints is given to the program. The objective function which is to be minimized or maximized is the fitness function. In SASPSO, population is taken as double vector with size 20. The value of momentum factor is chosen as 0.005 that will results in not escaping the global optima. The stopping criterion of the SASPSO is taken as error value of 0.1. If the error value is equal to or less than 0.1 then the SASPSO is stopped. The number of trials is taken as 10. The number of generations required and solutions for Quadratic Programming problem by using GA and SASPSO is presented in Table 2. For first and second NLP problems SASPSO is required less number of generations as compared GA and the accuracy of solutions by SASPSO which is better than GA. For third and fourth NLP problems SASPSO is required less number of generations as compared GA and the accuracy of solutions by SASPSO is 100 and which is better than GA. But the SASPSO is producing same solution for maximization problem. The Fig 1 shows number of generations required for each NLP problems by GA and SASPSO. As seen from results the SASPSO requires less number of computations as compared to GA improves the quality of optima . The presented method is suitable for optimization of Quadratic Programming problem, unimodal and multimodal functions. Table 1. Quadratic Programming Problems solved Equation With Constraints Beales method Min Z= X1*2+ X2^2 X1=2 SUB: X1+ X2>=4 X2=2 2 X1+ X2>=5 X1, X2 >=0 Z=8 Min Z=183-44 X1-42 X2+8 X1^2-12 X1 X2^2 X1=3.8 SUB: 2 X1+ X2<=10 X2=2.4 X1, X2>=10 Z=19 Max Z= 2 X1+3 X2 X1=2 SUB: X1^2+ X2^2<=20 X2=4 X1 X2<=8 Z=16 X1, X2>=0 Max 2 X1+2 X2-2 X2^2 X1=2 SUB : X1+4X2<=4 X2=0 X1+ X2<=2 Z=4
221
Eq No 1
International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 5, September October (2013), IAEME
Table 2. Comparison of Quadratic Programming Problems solved by using GA and SASPSO
Eq No Solution by GA[10] X1 1.90715 2.15473 2.05038 1 2.14182 2.01181 X2 2.09287 1.84527 1.94965 1.8582 1.98821 Gen. [10] 4 4 4 4 4 Optimize using GA[10] 8.01732 8.04788 8.00519 8.0403 8.00038 Accu racy [10] 100 100 100 100 100 Solution by SASPSO X1 X2 1.95539 2.04873 1.95916 1.95270 1.95688 1.96214 1.95293 1.95116 1.94477 1.95201 3.81998 3.80427 3.79966 3.79831 3.80224 2.36005 2.39102 2.40058 2.40337 2.39492 5 6 4 8 7 19.002 19.00247 19.00061 19.00035 19.0042 100 100 100 100 100 1.95908 3.81169 3.80799 3.81026 3.79655 3.81848 3.82026 3.80526 3.79655 3.80526 2.09653 1.99 1.91904 1.72685 1.9912 3.81583 4.00379 4.039 4.12527 4.00436 5 3 4 5 5 15.64055 15.99137 15.95508 15.82953 15.99548 97.75 99.94 99.71 98.93 99.97 3.82048 2.00526 2.00526 2.00526 2.00526 2.00526 2.00526 2.00526 2.00526 2.00526 1.95734 1.97025 1.86849 1.94342 1.89092 0.04266 0.02975 0.13161 0.05658 0.10902 3 3 3 3 3 3.99635 3.99823 3.9975 3.9936 3.9761 99.9 99.95 99.93 99.93 99.4 2.00526 2.00500 2.00500 2.00500 2.00500 2.00500 2.00500 2.00500 2.00500 2.00500 2.00500 2.05151 2.04818 2.05713 2.05779 2.05772 2.05428 2.05895 2.06040 2.05079 2.36760 2.37445 2.37094 2.39886 2.35490 2.35451 2.3736 2.39886 2.37368 2.35260 4.00526 4.00526 4.00526 4.00526 4.00526 4.00526 4.00526 4.00526 4.00526 4.00526 0.00100 0.00100 0.00100 0.00100 0.00100 0.00100 0.00100 0.00100 0.00100 0.00100 Gen. Optimize using SASPSO 8.00208 8.00470 8.00081 8.06115 8.08449 8.00048 8.02708 8.02144 8.00555 8.00377 19.00165 19.00714 19.00020 19.00018 19.00029 19.00793 19.00008 19.00048 19.00108 19.09185 16.02632 16.02632 16.02632 16.02632 16.02632 16.02632 16.02632 16.02632 16.02632 16.02632 4.01300 4.01300 4.01300 4.01300 4.01300 4.01300 4.01300 4.01300 4.01300 4.01300 Accuracy 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100 100
3 3 3 3 3 3 3 3 3 3 3 3 3 4 6 7 6 7 5 7 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2
222
International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 5, September October (2013), IAEME
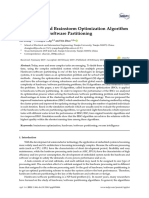
Comparision of Number of Generations required by PSO and SASPSO
Number of Generations 7 6 5 4 3 2 1 0 1 2 3 4 Equation Number
PSO SASPSO
Fig. 1. Number of Generations Required by PSO and SASPSO
V.
CONCLUSION
The author introduced Self Accelerated Smart Particle Swarm Optimization (SASPSO) to optimize difficult nonlinear programming problems (NLP) with fast convergence and better accuracy.. The main advantages of SASPSO are that it doesnt require velocity equation. In addition, it does not require any additional parameter like acceleration coefficients and inertia weight as in case other PSO algorithms. Momentum factor is introduced in SASPSO which can prevent particles from out of defined region without checking the validity of positions at every iterations result in saving of computational cost. Using SASPSO, we get large combinations of values of decision variables satisfying all the given constraints in very short time. The results of SASPSO are good in terms of are accuracy of optimal solution with less number of generations as compared GA. The proposed technique is more efficient for improving the quality of global optima of Nonlinear programming problems (NLP), unimodal and multimodal functions with less computational requirement and better accuracy. VI. [1] [2] [3] [4] [5] REFERENCES Boeringer D.W., Werner D.H., Particle swarm optimization versus genetic algorithms for phased array synthesis, IEEE Transactions Antennas Propagation, 52(3), 2004, 771779. Eberhart R.C., Shi Y.: Comparison between genetic algorithm and particle swarm optimization, In proc. IEEE Int. Conf. Computt., Anchorage, AK, 1998, 611-616. Kennedy J. and Eberhart R.C., Particle Swarm Optimization Proc York: IEEE International conference on neural networks, Springer-Verlag 1995, Piscataway; 4, 1985, 1942-1948. Shi Y.H. And Eberhart R.C., Parameter Selection in Particle Swarm Optimization Annual Conference on Evolutionary Computation, 1999, 101-106. Liu Yu, Zheng Qin, and Xingshi He., Supervisor-Student Model in Particle Swarm Optimization, IEEE Congress on Evolutionary Computation, 2004 (CEC 2004), 1, 2004, 542-547. Shi Y. and Eberhart R.C., A modified particle swarm optimizer, Proceedings of the IEEE Congress on Evolutionary Computation (CEC 1998), Piscataway, NI., 1998, pp.69-73.
223
[6]
International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 5, September October (2013), IAEME
[7] [8]
[9]
[10]
[11]
[12]
[13]
Pasupuleti Srinivas and Roberto Bhattiti, The Gregarious Particle Swarm Optimizer (G-PSO), GECCO 2006, Seattle, Washington, USA, 2006. Arumugam M. Senthil, Rao M. V. C., Chandramohan Aarthi, A new and improved version of particle swarm optimization algorithm with global-local best parameters, Journal of Knowledge and Information System (KAIS), Springer. 16(3), 2008, 324-350 Yang Ge,Rubo Zhang,: An Emotional Particle Swarm Optimization Algorithm, Advances in Natural Computation, Lecture notes in Computer Science, Springer-Verlag, Berlin, Germany, 3612, 2005,.553-561 P.S. Revenkar, Smita Kasar, Abhilasha Mishra, Optimization of Non Linear Programming Problems using non traditional method: Genetic Algorithms, International conference and work shop on emerging trends in technology, ACM newyork, ny, USA, 2010, 1002-2002. Chandramouli.H, Dr. Somashekhar C Desai, K S Jagadeesh and Kashyap D Dhruve, Elephant Swarm Optimization for Wireless Sensor Networks A Cross Layer Mechanism, International Journal of Computer Engineering & Technology (IJCET), Volume 4, Issue 2, 2013, pp. 45 - 60, ISSN Print: 0976 6367, ISSN Online: 0976 6375. R. Arivoli and Dr. I. A. Chidambaram, Multi-Objective Particle Swarm Optimization Based Load-Frequency Control of a Two-Area Power System with Smes Inter Connected using Ac-Dc Tie-Lines, International Journal of Electrical Engineering & Technology (IJEET), Volume 3, Issue 1, 2012, pp. 1 - 20, ISSN Print : 0976-6545, ISSN Online: 0976-6553. A.Sri Rama Chandra Murty and M. Surendra Prasad Babu, Implementation of Particle Swarm Optimization (Pso) Algorithm on Potato Expert System, International Journal of Computer Engineering & Technology (IJCET), Volume 4, Issue 4, 2013, pp. 82 - 90, ISSN Print: 0976 6367, ISSN Online: 0976 6375.
224
You might also like
- Association Rule Mining Using Self Adaptive Particle Swarm OptimizationDocument5 pagesAssociation Rule Mining Using Self Adaptive Particle Swarm OptimizationAnonymous TxPyX8cNo ratings yet
- Particle Swarm OptimizationDocument17 pagesParticle Swarm OptimizationMitul Kumar AhirwalNo ratings yet
- 10 1016@j Engappai 2020 103771Document19 pages10 1016@j Engappai 2020 103771Chakib BenmhamedNo ratings yet
- Differential Evolution Using A Neighborhood-Based Mutation OperatorDocument42 pagesDifferential Evolution Using A Neighborhood-Based Mutation OperatorYogesh SharmaNo ratings yet
- Design Optimization by Using Particle Swarm Optimization in Matlab and Apdl in AnsysDocument10 pagesDesign Optimization by Using Particle Swarm Optimization in Matlab and Apdl in AnsysBakkiya RajNo ratings yet
- Workflow Scheduling in Cloud Computing Environment by Combining Particle Swarm Optimization and Grey Wolf OptimizationDocument10 pagesWorkflow Scheduling in Cloud Computing Environment by Combining Particle Swarm Optimization and Grey Wolf OptimizationAnonymous Gl4IRRjzNNo ratings yet
- Optimal Scheduling of Generation Using ANFIS: T Sobhanbabu, DR T.Gowri Manohar, P.Dinakar Prasad ReddyDocument5 pagesOptimal Scheduling of Generation Using ANFIS: T Sobhanbabu, DR T.Gowri Manohar, P.Dinakar Prasad ReddyMir JamalNo ratings yet
- PCX - Report (Pso Latest)Document14 pagesPCX - Report (Pso Latest)adil khanNo ratings yet
- Ijesat 2012 02 01 15Document9 pagesIjesat 2012 02 01 15Ijesat JournalNo ratings yet
- Ijecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)Document14 pagesIjecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)IAEME PublicationNo ratings yet
- Particle Swarm Optimization Algorithm For The Traveling Salesman ProblemDocument23 pagesParticle Swarm Optimization Algorithm For The Traveling Salesman ProblemArisho DewiNo ratings yet
- I JSC 040201Document15 pagesI JSC 040201ijscNo ratings yet
- Article PSO GADocument6 pagesArticle PSO GAAmrou AkroutiNo ratings yet
- A Review of Particle Swarm Optimization (Pso) AlgorithmDocument26 pagesA Review of Particle Swarm Optimization (Pso) AlgorithmIAEME PublicationNo ratings yet
- Video Compression by Memetic AlgorithmDocument4 pagesVideo Compression by Memetic AlgorithmEditor IJACSANo ratings yet
- Particle Swarm Optimization (PSO) Algorithm: Parameters Effect and AnalysisDocument9 pagesParticle Swarm Optimization (PSO) Algorithm: Parameters Effect and AnalysisShosho ElgharablyNo ratings yet
- Radius Particle Swarm Optimization: Mana Anantathanavit Mud-Armeen MunlinDocument5 pagesRadius Particle Swarm Optimization: Mana Anantathanavit Mud-Armeen MunlinJoel CarpenterNo ratings yet
- Logic2010 PDFDocument14 pagesLogic2010 PDFTesfaye Utopia UtopiaNo ratings yet
- Paper-4 Review of Particle Swarm OptimizationDocument12 pagesPaper-4 Review of Particle Swarm OptimizationRachel WheelerNo ratings yet
- 18BIT0467 18BIT0473 Paper Under HEMALATHA SDocument15 pages18BIT0467 18BIT0473 Paper Under HEMALATHA StasriNo ratings yet
- Comparison of Genetic Algorithm and Particle Swarm OptimizationDocument6 pagesComparison of Genetic Algorithm and Particle Swarm OptimizationMikemekanicsNo ratings yet
- Comparison Between Genetic Algorithms and Particle Swarm OptimizationDocument2 pagesComparison Between Genetic Algorithms and Particle Swarm OptimizationGNANAPRAKASHNo ratings yet
- Particle Swarm OptimizationDocument8 pagesParticle Swarm OptimizationverilogcourseteamNo ratings yet
- Microblaze Based Multi-Processor Implementation of Regrouping Particle Swarm Optimization AlgorithmDocument7 pagesMicroblaze Based Multi-Processor Implementation of Regrouping Particle Swarm Optimization AlgorithmJoelNo ratings yet
- A Pair-Wise Bare Bones Particle Swarm Optimization Algorithm For Nonlinear FunctionsDocument9 pagesA Pair-Wise Bare Bones Particle Swarm Optimization Algorithm For Nonlinear FunctionsCyz RobertNo ratings yet
- Javid Rad 2017Document82 pagesJavid Rad 2017Chakib BenmhamedNo ratings yet
- Pgagenplan (Ieee Trans) 2Document8 pagesPgagenplan (Ieee Trans) 2bhumaniNo ratings yet
- PSO Algorithm With Self Tuned Parameter For Efficient Routing in VLSI DesignDocument4 pagesPSO Algorithm With Self Tuned Parameter For Efficient Routing in VLSI Designsudipta2580No ratings yet
- Monkey Search Algorithm For ECE Components PartitiDocument7 pagesMonkey Search Algorithm For ECE Components PartitiAlNo ratings yet
- The International Journal of Engineering and Science (The IJES)Document7 pagesThe International Journal of Engineering and Science (The IJES)theijesNo ratings yet
- A Novel Face Recognition Algorithm For Distinguishing Faces With Various AnglesDocument5 pagesA Novel Face Recognition Algorithm For Distinguishing Faces With Various Anglestjvg1991No ratings yet
- Ijecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)Document6 pagesIjecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)IAEME PublicationNo ratings yet
- First Springer PaperDocument19 pagesFirst Springer PaperMauricio Moyano CastilloNo ratings yet
- Economic Load Dispatch Using Particle Swarm Optimization: Volume 2, Issue 4, April 2013Document10 pagesEconomic Load Dispatch Using Particle Swarm Optimization: Volume 2, Issue 4, April 2013International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Particle Swarm Optimization Algorithm For Mixed Variable Nonlinear ProblemsDocument14 pagesA Particle Swarm Optimization Algorithm For Mixed Variable Nonlinear ProblemsAhmed WestministerNo ratings yet
- Optimum Coordination of Overcurrent Relays Using SADE AlgorithmDocument10 pagesOptimum Coordination of Overcurrent Relays Using SADE AlgorithmJamile_P_NNo ratings yet
- Research Article: An Improved Method of Particle Swarm Optimization For Path Planning of Mobile RobotDocument12 pagesResearch Article: An Improved Method of Particle Swarm Optimization For Path Planning of Mobile Robotmarcio pivelloNo ratings yet
- Pso LitDocument7 pagesPso Litadil khanNo ratings yet
- Ga Vs LseDocument6 pagesGa Vs LseSachin SadanandanNo ratings yet
- Study of Optimal Mutation Factor For Genetic Algorithm (GA)Document4 pagesStudy of Optimal Mutation Factor For Genetic Algorithm (GA)editorijaiemNo ratings yet
- Online Sparse Gaussian Process (GP) Regression Model For Human Motion TrackingDocument6 pagesOnline Sparse Gaussian Process (GP) Regression Model For Human Motion TrackingIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Differential Evolution Using A Neighborhood-Based PDFDocument28 pagesDifferential Evolution Using A Neighborhood-Based PDFYogesh SharmaNo ratings yet
- Application of Particle Swarm Optimization For Economic Load Dispatch and Loss ReductionDocument5 pagesApplication of Particle Swarm Optimization For Economic Load Dispatch and Loss ReductionSal ExcelNo ratings yet
- A Simple Hybrid Particle Swarm OptimizationDocument11 pagesA Simple Hybrid Particle Swarm OptimizationMary MorseNo ratings yet
- SPE-176468-MS A Self-Adaptive Surrogate-Assisted Evolutionary Algorithm For Well Placement Optimization ProblemsDocument16 pagesSPE-176468-MS A Self-Adaptive Surrogate-Assisted Evolutionary Algorithm For Well Placement Optimization ProblemsMarcos SilvaNo ratings yet
- A Hybrid Approach of Genetic Algorithm and Particle Swarm Technique To Software Test Case GenerationDocument7 pagesA Hybrid Approach of Genetic Algorithm and Particle Swarm Technique To Software Test Case GenerationArdhito PrimatamaNo ratings yet
- Structural Optimization Using Evolutionary Algorithms PDFDocument19 pagesStructural Optimization Using Evolutionary Algorithms PDFAyad SlabyNo ratings yet
- Chapter 11 Object-Oriented DesignDocument45 pagesChapter 11 Object-Oriented DesignNgoc Q N QuachNo ratings yet
- V47i01 PDFDocument38 pagesV47i01 PDFzibunansNo ratings yet
- A Dynamic Global and Local Combined Particle Swarm Optimization AlgorithmDocument8 pagesA Dynamic Global and Local Combined Particle Swarm Optimization AlgorithmSopan Ram TambekarNo ratings yet
- Flexible Job-Shop Scheduling With TRIBES-PSO ApproachDocument9 pagesFlexible Job-Shop Scheduling With TRIBES-PSO ApproachJournal of ComputingNo ratings yet
- Generalized Swarm Intelligence Algorithms With Domain-Specific HeuristicsDocument9 pagesGeneralized Swarm Intelligence Algorithms With Domain-Specific HeuristicsIAES IJAINo ratings yet
- A New Hybrid Binary Particle Swarm Optimization Algorithm For Multidimensional Knapsack ProblemDocument7 pagesA New Hybrid Binary Particle Swarm Optimization Algorithm For Multidimensional Knapsack ProblemAmalina ZakariaNo ratings yet
- Research MethodologyDocument13 pagesResearch Methodologyamitcrathod4193No ratings yet
- Particle Swarm Optimization of Neural Network Architectures and WeightsDocument4 pagesParticle Swarm Optimization of Neural Network Architectures and WeightsgalaxystarNo ratings yet
- Applied Sciences: Using Improved Brainstorm Optimization Algorithm For Hardware/Software PartitioningDocument17 pagesApplied Sciences: Using Improved Brainstorm Optimization Algorithm For Hardware/Software PartitioningValentin MotocNo ratings yet
- A Simplex Method-Based Social Spider Optimization Algorithm For Clustering AnalysisDocument28 pagesA Simplex Method-Based Social Spider Optimization Algorithm For Clustering AnalysisVivi AnNo ratings yet
- Multi-Objective Optimization using Artificial Intelligence TechniquesFrom EverandMulti-Objective Optimization using Artificial Intelligence TechniquesNo ratings yet
- Determinants Affecting The User's Intention To Use Mobile Banking ApplicationsDocument8 pagesDeterminants Affecting The User's Intention To Use Mobile Banking ApplicationsIAEME PublicationNo ratings yet
- Impact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesDocument10 pagesImpact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesIAEME PublicationNo ratings yet
- Gandhi On Non-Violent PoliceDocument8 pagesGandhi On Non-Violent PoliceIAEME PublicationNo ratings yet
- Voice Based Atm For Visually Impaired Using ArduinoDocument7 pagesVoice Based Atm For Visually Impaired Using ArduinoIAEME PublicationNo ratings yet
- Modeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyDocument14 pagesModeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyIAEME PublicationNo ratings yet
- Broad Unexposed Skills of Transgender EntrepreneursDocument8 pagesBroad Unexposed Skills of Transgender EntrepreneursIAEME PublicationNo ratings yet
- A Study On The Reasons For Transgender To Become EntrepreneursDocument7 pagesA Study On The Reasons For Transgender To Become EntrepreneursIAEME PublicationNo ratings yet
- Analyse The User Predilection On Gpay and Phonepe For Digital TransactionsDocument7 pagesAnalyse The User Predilection On Gpay and Phonepe For Digital TransactionsIAEME PublicationNo ratings yet
- Visualising Aging Parents & Their Close Carers Life Journey in Aging EconomyDocument4 pagesVisualising Aging Parents & Their Close Carers Life Journey in Aging EconomyIAEME PublicationNo ratings yet
- Attrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesDocument15 pagesAttrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesIAEME PublicationNo ratings yet
- Influence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiDocument16 pagesInfluence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiIAEME PublicationNo ratings yet
- A Multiple - Channel Queuing Models On Fuzzy EnvironmentDocument13 pagesA Multiple - Channel Queuing Models On Fuzzy EnvironmentIAEME PublicationNo ratings yet
- A Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurDocument7 pagesA Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurIAEME PublicationNo ratings yet
- A Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaDocument9 pagesA Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaIAEME PublicationNo ratings yet
- Role of Social Entrepreneurship in Rural Development of India - Problems and ChallengesDocument18 pagesRole of Social Entrepreneurship in Rural Development of India - Problems and ChallengesIAEME PublicationNo ratings yet
- A Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiDocument16 pagesA Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiIAEME PublicationNo ratings yet
- Optimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsDocument13 pagesOptimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsIAEME PublicationNo ratings yet
- Dealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsDocument8 pagesDealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsIAEME PublicationNo ratings yet
- Financial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelDocument9 pagesFinancial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelIAEME PublicationNo ratings yet
- Various Fuzzy Numbers and Their Various Ranking ApproachesDocument10 pagesVarious Fuzzy Numbers and Their Various Ranking ApproachesIAEME PublicationNo ratings yet
- EXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESDocument9 pagesEXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESIAEME PublicationNo ratings yet
- A Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksDocument10 pagesA Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksIAEME PublicationNo ratings yet
- Application of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDDocument19 pagesApplication of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDIAEME PublicationNo ratings yet
- Moderating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorDocument7 pagesModerating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorIAEME PublicationNo ratings yet
- A Review of Particle Swarm Optimization (Pso) AlgorithmDocument26 pagesA Review of Particle Swarm Optimization (Pso) AlgorithmIAEME PublicationNo ratings yet
- Quality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceDocument7 pagesQuality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceIAEME PublicationNo ratings yet
- Knowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentDocument8 pagesKnowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentIAEME PublicationNo ratings yet
- Analysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsDocument13 pagesAnalysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsIAEME PublicationNo ratings yet
- Analysis On Machine Cell Recognition and Detaching From Neural SystemsDocument9 pagesAnalysis On Machine Cell Recognition and Detaching From Neural SystemsIAEME PublicationNo ratings yet
- Prediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsDocument13 pagesPrediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsIAEME PublicationNo ratings yet
- HYDRAULICSDocument15 pagesHYDRAULICSHoney ApariceNo ratings yet
- Influences of Le Corbusier and Louis I Kahn in IndiaDocument10 pagesInfluences of Le Corbusier and Louis I Kahn in IndiaRashi Chugh88% (8)
- Fire Warden Training: Richard Hagger - ConsultantDocument61 pagesFire Warden Training: Richard Hagger - ConsultantRichard Hagger100% (2)
- Computing Test StatisticDocument8 pagesComputing Test StatisticFranklin BenitezNo ratings yet
- Pile Foundations - Design, Construction and Testing Guide: What Is A Pile Foundation?Document3 pagesPile Foundations - Design, Construction and Testing Guide: What Is A Pile Foundation?Ashis MingalaNo ratings yet
- AccountingDocument45 pagesAccountingAfia ZaheenNo ratings yet
- Chap1 Organizational Behavior 2020Document52 pagesChap1 Organizational Behavior 2020DarshanNo ratings yet
- The Problem of Authenticity or External CriticismDocument30 pagesThe Problem of Authenticity or External CriticismKen StarNo ratings yet
- Catalog of Replacement Parts: Model D300 Series MixersDocument24 pagesCatalog of Replacement Parts: Model D300 Series Mixersanto starlinNo ratings yet
- Hot Water Atmospheric BOILERDocument3 pagesHot Water Atmospheric BOILERcarlossandovalhdzNo ratings yet
- USGSPP610 Gold Districts United StatesDocument291 pagesUSGSPP610 Gold Districts United StatesDave VW100% (1)
- M16a3 Upper SpecsDocument1 pageM16a3 Upper SpecsMosinNo ratings yet
- MBSImP Assignment RubricDocument3 pagesMBSImP Assignment RubricmahdislpNo ratings yet
- WESCAM MX-15-0503AA-SpecDocument2 pagesWESCAM MX-15-0503AA-SpecAIT FARIDNo ratings yet
- Online Medical Delivery ServiceDocument10 pagesOnline Medical Delivery ServiceYESHUDAS JIVTODENo ratings yet
- Lesson - TrendsDocument26 pagesLesson - TrendsLloydNo ratings yet
- Synopsis Format-Practice SchoolDocument4 pagesSynopsis Format-Practice SchoolArjun GoyalNo ratings yet
- Qualitative Study On Stress Among Nurses Working at Private Sector, in Suburban KolkataDocument9 pagesQualitative Study On Stress Among Nurses Working at Private Sector, in Suburban KolkataSandra RNo ratings yet
- Electrical Circuits 2 AssignmentDocument5 pagesElectrical Circuits 2 Assignmentangelo dedicatoriaNo ratings yet
- Getachew Final EditedDocument76 pagesGetachew Final EditedDesalegn DgaNo ratings yet
- Introduction To Discourse Analysis PDFDocument20 pagesIntroduction To Discourse Analysis PDFShobade Christianah Temitope100% (1)
- Glenbard East Lesson PlanDocument8 pagesGlenbard East Lesson Planapi-608726850No ratings yet
- Lesson Plan - The V LanguageDocument4 pagesLesson Plan - The V LanguageLê Thị Ái NhiNo ratings yet
- BiometricsDocument10 pagesBiometricsKrishna Murthy PNo ratings yet
- Deber Modelación de AguasDocument2 pagesDeber Modelación de AguasLiz VillamarNo ratings yet
- Denso Mitsubishi L200 Common Rail PDFDocument53 pagesDenso Mitsubishi L200 Common Rail PDFAlex Renne Chambi100% (8)
- Valtra A114 HitechDocument31 pagesValtra A114 Hitechhicev32274No ratings yet
- Data Privacy Notice TemplateDocument1 pageData Privacy Notice TemplateangeloNo ratings yet
- Republic of The Philippines Social Security System MemberDocument1 pageRepublic of The Philippines Social Security System MemberreyNo ratings yet
- Thesis Correction RanjitDocument3 pagesThesis Correction Ranjitranjit makajuNo ratings yet