You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- PART 1. Microscopy 1. HeadDocument5 pagesPART 1. Microscopy 1. HeadAlea LinksNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Nikon E400 ManualDocument44 pagesNikon E400 ManualluroguitaNo ratings yet
- ML 155 PDFDocument2 pagesML 155 PDFBuwana luhurNo ratings yet
- GAMES - 67 - 1985 - September No Ads PDFDocument53 pagesGAMES - 67 - 1985 - September No Ads PDFRodrigo RiveraNo ratings yet
- Buehler - Equipment PDFDocument54 pagesBuehler - Equipment PDFArnold CoavasNo ratings yet
- Lab 454 Practical 1Document18 pagesLab 454 Practical 1Najihah OmarNo ratings yet
- Kenneth RomeroDocument4 pagesKenneth RomeroKenneth RomeroNo ratings yet
- Importance of Wearing Anti-Radiation Eyeglass in Today'S New NormalDocument3 pagesImportance of Wearing Anti-Radiation Eyeglass in Today'S New NormalJewel Anne Ruiz TecsonNo ratings yet
- Ministry of Interior Project: Inspection / Test Sheet CCTV System EW-01BDocument3 pagesMinistry of Interior Project: Inspection / Test Sheet CCTV System EW-01BPERVEZ AHMAD KHANNo ratings yet
- B1, Topic 1.1 Student Practical: Observation of Cells Under A MicroscopeDocument5 pagesB1, Topic 1.1 Student Practical: Observation of Cells Under A MicroscopeFatimah MNo ratings yet
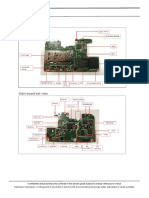
- Level 3 Repair: Main Board Top ViewDocument20 pagesLevel 3 Repair: Main Board Top ViewRicardo LopezNo ratings yet
- ldt5 0Document24 pagesldt5 0p2342No ratings yet
- Practical 2 ProcedureDocument2 pagesPractical 2 Procedurehieu tranNo ratings yet
- Peanut Butter Lips ReviewDocument2 pagesPeanut Butter Lips ReviewNicole ForberNo ratings yet
- ExposureDocument20 pagesExposureAlfieNo ratings yet
- ALMERO, Sophia Jessica A. - Session 3 ActivityDocument2 pagesALMERO, Sophia Jessica A. - Session 3 ActivitySophia AlmeroNo ratings yet
- SD6C430I-HC Datasheet 20170104Document3 pagesSD6C430I-HC Datasheet 20170104Esmeralda PonceNo ratings yet
- Sperian - Vision Screener - I400 - Brochure PDFDocument6 pagesSperian - Vision Screener - I400 - Brochure PDFNathalia ZamarraNo ratings yet
- A PhotographDocument7 pagesA PhotographYashikaNo ratings yet
- Đề số 5 - TCA PDFDocument6 pagesĐề số 5 - TCA PDFphanducNo ratings yet
- Damisch Five NotesDocument3 pagesDamisch Five Notesella daniNo ratings yet
- Infrared Photography ApplicationsDocument3 pagesInfrared Photography ApplicationsKaren PañoNo ratings yet
- Optometrist GR II QPDocument16 pagesOptometrist GR II QPAnees VpNo ratings yet
- SN 2Document2 pagesSN 2ELYA MAISARAH BINTI MAZLAN MoeNo ratings yet
- ELE492 - ELE492 - Image Process Lecture Notes 6Document25 pagesELE492 - ELE492 - Image Process Lecture Notes 6ozllmtknNo ratings yet
- Specifications of Hikvision DS-2CE16D0T-IRP CCTV CameraDocument1 pageSpecifications of Hikvision DS-2CE16D0T-IRP CCTV Camerasecurekart0% (1)
- Visual Language in Cinematography Is A Rich and Complex Topic That Encompasses A Wide Range of Techniques and Elements Used by Filmmakers To Convey MeaningDocument6 pagesVisual Language in Cinematography Is A Rich and Complex Topic That Encompasses A Wide Range of Techniques and Elements Used by Filmmakers To Convey Meaningcorrespondent484No ratings yet
- HIKVISION Integrated Security Solutions - 20221110Document1 pageHIKVISION Integrated Security Solutions - 20221110patrishiNo ratings yet
- CataractDocument38 pagesCataractruhulcoc1No ratings yet
- Your EyesDocument71 pagesYour EyessdgouseNo ratings yet