You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (843)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Solutions Manual For Fundamentals of Structural Analysis 5th Edition by Leet Ibsn 0073398004Document82 pagesSolutions Manual For Fundamentals of Structural Analysis 5th Edition by Leet Ibsn 0073398004Jewfred LicenNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Clean Cut Trainning ManualDocument205 pagesClean Cut Trainning ManualPETROPATH FLUIDS INDIA PVT. LTD.No ratings yet
- This Study Resource Was: 2.7-6 Energy Balance On A Flow System With A Pump and Heat Exchanger. WaterDocument7 pagesThis Study Resource Was: 2.7-6 Energy Balance On A Flow System With A Pump and Heat Exchanger. Waterqwer50% (2)
- Craftsman Table SawDocument40 pagesCraftsman Table SawdrdaverobertsNo ratings yet
- NES 362 Type and Production Testing of Mechanical Equipment Category 3Document36 pagesNES 362 Type and Production Testing of Mechanical Equipment Category 3JEORJENo ratings yet
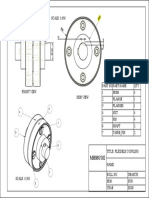
- Flexible Coupling 2Document1 pageFlexible Coupling 2fahimhubNo ratings yet
- Nadeem Tours & Travels: Address B/102, Sunrock Complex, Naya Nagar, Mira Road (E), THANE-401107. Mob. 8655828272Document1 pageNadeem Tours & Travels: Address B/102, Sunrock Complex, Naya Nagar, Mira Road (E), THANE-401107. Mob. 8655828272fahimhubNo ratings yet
- Mechanical Engineering PHD Thesis Topics (1) Research Topics PDFDocument7 pagesMechanical Engineering PHD Thesis Topics (1) Research Topics PDFfahimhubNo ratings yet
- Machine and Tool Offsets PDFDocument3 pagesMachine and Tool Offsets PDFfahimhub100% (1)
- Oil GasDocument1 pageOil GasfahimhubNo ratings yet
- Boeing Case StudyDocument5 pagesBoeing Case StudyBatukada VerínNo ratings yet
- NeboshDocument2 pagesNeboshven1959No ratings yet
- Z-Transforms 286201741Document26 pagesZ-Transforms 286201741fahimhubNo ratings yet
- MON TUE: Automobile Engineering DepartmentDocument1 pageMON TUE: Automobile Engineering DepartmentfahimhubNo ratings yet
- Resume: Waghoo Tarique Ahmed AashiqueDocument3 pagesResume: Waghoo Tarique Ahmed AashiquefahimhubNo ratings yet
- Wentloog, Cardiff: Archaeological Watching BriefDocument19 pagesWentloog, Cardiff: Archaeological Watching BriefThe Glamorgan-Gwent Archaeological Trust LtdNo ratings yet
- EBS Roadmap PDFDocument83 pagesEBS Roadmap PDFAbdul Qadir ShariefNo ratings yet
- Engineering Fundamentals For Piping Pipelines ASME B31 1577476940Document1 pageEngineering Fundamentals For Piping Pipelines ASME B31 1577476940AliNo ratings yet
- PYTHON PANDAS Cheat SheetDocument2 pagesPYTHON PANDAS Cheat SheetIndri Dayanah AyulaniNo ratings yet
- 3352 PDFDocument6 pages3352 PDFMSNo ratings yet
- Hot Work PTWDocument2 pagesHot Work PTWHSSE AL THAIL GROUPNo ratings yet
- Matlab CoderDocument5 pagesMatlab CoderxacdinhdiNo ratings yet
- Eigenfunctions of LTI SystemDocument13 pagesEigenfunctions of LTI SystemVihang DholakiyaNo ratings yet
- Take Home Quizz - Exec HMDocument5 pagesTake Home Quizz - Exec HMbeshfrend'z0% (1)
- Toshiba Tecra M9 and Tecra A9: Two New Laptop With Santa Rosa UnveiledDocument11 pagesToshiba Tecra M9 and Tecra A9: Two New Laptop With Santa Rosa UnveiledocchityaNo ratings yet
- C36 Combi Full ManualDocument52 pagesC36 Combi Full ManualEricHeatNo ratings yet
- Vacuum Casting Systems H-5800-0110-03-A enDocument16 pagesVacuum Casting Systems H-5800-0110-03-A ensaravananNo ratings yet
- Prepared By: STUDENT NAME ID NUMBERDocument75 pagesPrepared By: STUDENT NAME ID NUMBERSiraj MohammedNo ratings yet
- Computer Animation: Course OrientationDocument10 pagesComputer Animation: Course Orientationayhel geronaNo ratings yet
- Gallium Nitride Materials TechnologyDocument8 pagesGallium Nitride Materials TechnologySubodh JohriNo ratings yet
- Mud LoggingDocument7 pagesMud Loggingjose.rejasNo ratings yet
- TM-9-2320-280-20-3 HMMWV Unit Maintnance Vol 3Document1,151 pagesTM-9-2320-280-20-3 HMMWV Unit Maintnance Vol 3AUGieDogie1100% (5)
- Application of 60 HZ Rated Medium Voltage Vacuum Circuit Breaker at 50 HZ PDFDocument2 pagesApplication of 60 HZ Rated Medium Voltage Vacuum Circuit Breaker at 50 HZ PDFtobyNo ratings yet
- Brochure2Folds Optima WRAC 112012Document2 pagesBrochure2Folds Optima WRAC 112012railen17No ratings yet
- Super Heterodyne Receiver-A: ST NDDocument3 pagesSuper Heterodyne Receiver-A: ST NDEunice Jane Bolgado-DoctorNo ratings yet
- MSME CertificateDocument1 pageMSME Certificateavadhut gadeNo ratings yet
- Intra Applycom PrintDocument3 pagesIntra Applycom PrintMohd HanisNo ratings yet
- Mosquito Magnet Pioneer InstructionsDocument9 pagesMosquito Magnet Pioneer InstructionsGman1234No ratings yet
- MS DocDocument627 pagesMS DocSajjadAliNo ratings yet
- LS MCB & RCD CatalogDocument56 pagesLS MCB & RCD Catalogkmleongmy100% (1)