You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Load Tables - Capacity Charts - Selective (VERY GOOD) PDFDocument10 pagesLoad Tables - Capacity Charts - Selective (VERY GOOD) PDFsarbiniNo ratings yet
- Infrastructure Design Report - G1!1!41Document41 pagesInfrastructure Design Report - G1!1!41Hafizul ZaidanNo ratings yet
- Construction Crystal PerliteDocument8 pagesConstruction Crystal PerlitenandanaNo ratings yet
- KZCO AllcatalogDocument76 pagesKZCO AllcatalogJaime SuaNo ratings yet
- Topics Problem Set 6 - Hydraulics 3rd Term AY 2020-2021Document1 pageTopics Problem Set 6 - Hydraulics 3rd Term AY 2020-2021Mr. Mark B.No ratings yet
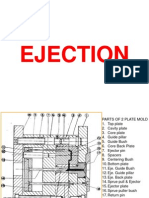
- Engine PartsDocument28 pagesEngine PartsBrandiece 'Dee Dee' Berry100% (1)
- Studies On Chemical Resistance of Low Water/cement Ratio ConcretesDocument10 pagesStudies On Chemical Resistance of Low Water/cement Ratio ConcretesMaziar MehravarNo ratings yet
- 04 FORM Personal Daily Report HSEDocument4 pages04 FORM Personal Daily Report HSEArga Sakti YusnandarNo ratings yet
- AGRU-Technical-Butt WeldingDocument4 pagesAGRU-Technical-Butt Weldingrenne_mujicaNo ratings yet
- Boq G+0Document44 pagesBoq G+0elias workuNo ratings yet
- Coorporate Office BuildingDocument35 pagesCoorporate Office BuildingSivaiNo ratings yet
- Caterpillar Disassembly and Assembly Transmission 950g and 962g Wheel LoaderDocument20 pagesCaterpillar Disassembly and Assembly Transmission 950g and 962g Wheel Loaderpatrick100% (40)
- Squares Urban Spaces in Europe PDFDocument312 pagesSquares Urban Spaces in Europe PDFBianca ElenaNo ratings yet
- Static and Cyclic Properties of Clay Subgrade Stabilised With Rice Husk Ash and Portland Slag CementDocument12 pagesStatic and Cyclic Properties of Clay Subgrade Stabilised With Rice Husk Ash and Portland Slag CementAndrea RinconNo ratings yet
- Vibration PPV EstimationDocument8 pagesVibration PPV EstimationJensen TanNo ratings yet
- PP-R and PP-RCT Pipe Systems: Hot and Cold Water Systems and Heating ApplicationsDocument24 pagesPP-R and PP-RCT Pipe Systems: Hot and Cold Water Systems and Heating ApplicationsKwadwo Siaw-MarfoNo ratings yet
- MOS For Construction of Bridge - 042 Updated at PIC-I-T - 7062Document27 pagesMOS For Construction of Bridge - 042 Updated at PIC-I-T - 7062Najmul QamarNo ratings yet
- LP Solidstart I-Joists Residential Construction: Canadian (LSD) Technical GuideDocument28 pagesLP Solidstart I-Joists Residential Construction: Canadian (LSD) Technical GuidepghasaeiNo ratings yet
- Plastic-Insulated Winding Wires: Norddeutsche Seekabelwerke GMBH & Co. KGDocument6 pagesPlastic-Insulated Winding Wires: Norddeutsche Seekabelwerke GMBH & Co. KGcesar007chNo ratings yet
- Jana Jagriti Basic SchoolDocument16 pagesJana Jagriti Basic Schoolrajendra moktanNo ratings yet
- Zap Diy Old School Cable Kit Guide v1Document6 pagesZap Diy Old School Cable Kit Guide v1asdfhwegaNo ratings yet
- Job Advert - ServicemanDocument2 pagesJob Advert - ServicemanJoseph buluguNo ratings yet
- K EjectionDocument21 pagesK EjectionAmolPagdalNo ratings yet
- High-Workability Concrete High-Workability ConcreteDocument43 pagesHigh-Workability Concrete High-Workability ConcreteF Azam Khan AyonNo ratings yet
- Dream House Writing StrategiesDocument26 pagesDream House Writing StrategiesAngela MariaNo ratings yet
- Concrete Formwork For Tunnel LiningDocument58 pagesConcrete Formwork For Tunnel LiningAlejandro Castañón0% (1)
- STRATCO Slats DIY Guide PDFDocument2 pagesSTRATCO Slats DIY Guide PDF112160rbcNo ratings yet
- ExamDocument18 pagesExamMark MamaradloNo ratings yet
- Braced FrameDocument2 pagesBraced FrameRicha ShahNo ratings yet
- Pipe Is 3601Document5 pagesPipe Is 3601Tarun VermaNo ratings yet