You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Anti-Corruption, Grievance Redressal and Whistleblower Protection Act, 2010.Document31 pagesAnti-Corruption, Grievance Redressal and Whistleblower Protection Act, 2010.Jayesh BhedaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Yamaha R1 2009 Service ManualDocument526 pagesYamaha R1 2009 Service ManualV2No ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Iron DomeDocument2 pagesIron DomeV2No ratings yet
- Vibration Is EverythingDocument4 pagesVibration Is EverythinganescuveronicaNo ratings yet
- Russian Weapon SystemDocument49 pagesRussian Weapon SystemV2100% (2)
- Russian Weapon SystemDocument49 pagesRussian Weapon SystemV2100% (2)
- Corrosion SlidesDocument65 pagesCorrosion SlidesAnshul ShuklaNo ratings yet
- Extended-Design and Analysis of A Network Arch BridgeDocument10 pagesExtended-Design and Analysis of A Network Arch BridgehansNo ratings yet
- Pakistans Nuclear Weapons-Proliferation andDocument27 pagesPakistans Nuclear Weapons-Proliferation andV2No ratings yet
- SJPO 2016 General Round - Answer GuideDocument50 pagesSJPO 2016 General Round - Answer GuideZleep100% (1)
- Lecture 7 Inclusions and Pinhole Formation in DIDocument33 pagesLecture 7 Inclusions and Pinhole Formation in DILuis Arturo RamirezNo ratings yet
- Capabilities of Indian, Chinese and Pakistani Long-Range MissileDocument1 pageCapabilities of Indian, Chinese and Pakistani Long-Range MissileV2No ratings yet
- Aeromag AsiaDocument39 pagesAeromag AsiaLobbyist_MyoNo ratings yet
- Floor Guide - LazonaDocument5 pagesFloor Guide - LazonaV2No ratings yet
- Decoding Indias MMRCA DecisionDocument5 pagesDecoding Indias MMRCA DecisionMartin Schweighart MoyaNo ratings yet
- Boiling and The Lei Den Frost EffectDocument4 pagesBoiling and The Lei Den Frost EffectV2No ratings yet
- Todays DayDocument9 pagesTodays DayV2No ratings yet
- Gorgeous Inward Facing Home in Mexico CityDocument18 pagesGorgeous Inward Facing Home in Mexico CityV2No ratings yet
- Robotics and AutomationDocument42 pagesRobotics and AutomationV2100% (2)
- Kim Kardashian - Jingle Ball 2010Document16 pagesKim Kardashian - Jingle Ball 2010V2No ratings yet
- Rihanna at BET StudiosDocument13 pagesRihanna at BET StudiosV2No ratings yet
- Kim Kardashian 2bhappy Jewelry Collection Launch: @youngesterDocument9 pagesKim Kardashian 2bhappy Jewelry Collection Launch: @youngesterV2No ratings yet
- The 5S Methodology As A ToolDocument4 pagesThe 5S Methodology As A ToolV2No ratings yet
- Jennifer Love Hewitt HQDocument7 pagesJennifer Love Hewitt HQV2No ratings yet
- Jennifer Love Hewitt HQDocument7 pagesJennifer Love Hewitt HQV2No ratings yet
- Magnet Connection For PLCDocument5 pagesMagnet Connection For PLCV2No ratings yet
- Hilary Duff in LADocument14 pagesHilary Duff in LAV2No ratings yet
- UCAV Future of Air Warfare Final StandardDocument16 pagesUCAV Future of Air Warfare Final StandardV20% (1)
- Ashley Greene On Her Way To The GymDocument12 pagesAshley Greene On Her Way To The GymV2No ratings yet
- Travel HawanaDocument14 pagesTravel HawanaV2No ratings yet
- Youngester Magazine 30 - October - 2010Document13 pagesYoungester Magazine 30 - October - 2010V2No ratings yet
- Microsoft Word Tips - : How To Print Word Document or Make PDF That Includes A BackgroundDocument18 pagesMicrosoft Word Tips - : How To Print Word Document or Make PDF That Includes A BackgroundV2No ratings yet
- 45 Most Impressive Examples of Sky PhotographyDocument27 pages45 Most Impressive Examples of Sky PhotographyV2No ratings yet
- Diwali - Festival of ColorDocument16 pagesDiwali - Festival of ColorV2No ratings yet
- Concept Engineering: Red Dot Design AwardsDocument20 pagesConcept Engineering: Red Dot Design AwardsV2No ratings yet
- CAD - Model of DiscDocument5 pagesCAD - Model of DiscAshokkumar VelloreNo ratings yet
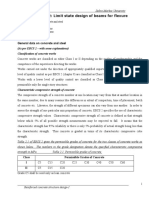
- Chapter 2: Limit State Design of Beams For Flexure: General Data On Concrete and SteelDocument27 pagesChapter 2: Limit State Design of Beams For Flexure: General Data On Concrete and SteelAntenehNo ratings yet
- Steel Connections: ResultsDocument6 pagesSteel Connections: ResultsJay SalasNo ratings yet
- RECIRCULATING LOOP CHILLER LOW PROFILE WEATHER-RESISTANTDocument2 pagesRECIRCULATING LOOP CHILLER LOW PROFILE WEATHER-RESISTANTbioarquitecturaNo ratings yet
- Weld Metal Solidification-1 - Grain StructureDocument51 pagesWeld Metal Solidification-1 - Grain StructureChelekara Subramanian Abhilash Iyer100% (3)
- Liquid Solutions PDFDocument50 pagesLiquid Solutions PDFAniruddha KawadeNo ratings yet
- IMSc Syllabus BIT MESRA PDFDocument83 pagesIMSc Syllabus BIT MESRA PDFGautam DuttaNo ratings yet
- Bhel Gearbox-Product Profile - inDocument20 pagesBhel Gearbox-Product Profile - inKamaldeep GuptaNo ratings yet
- Determination of Lightfastness (According To Iso 12040) 2.3.2.1Document2 pagesDetermination of Lightfastness (According To Iso 12040) 2.3.2.1marinaNo ratings yet
- IntroductionDocument31 pagesIntroductionAhmed FaragallahNo ratings yet
- 420 Stainless Steel DS 201406 PDFDocument3 pages420 Stainless Steel DS 201406 PDFAlexander Saavedra MambuscayNo ratings yet
- Electroanalytical Techniques for Studying Redox ReactionsDocument3 pagesElectroanalytical Techniques for Studying Redox Reactionsjayapandis83No ratings yet
- Vertical Irregularities in StructuresDocument3 pagesVertical Irregularities in StructuresAbhijit SarkarNo ratings yet
- Lecture Sheet PDFDocument65 pagesLecture Sheet PDFFaruk abdullahNo ratings yet
- BeltsDocument1 pageBeltsAngielou SialanaNo ratings yet
- Tuao Vocational and Technical School Senior High School DepartmentDocument9 pagesTuao Vocational and Technical School Senior High School DepartmentMarvelyn Maneclang CatubagNo ratings yet
- LensesDocument13 pagesLenseshelmi_tarmiziNo ratings yet
- EN15242 Ventilation Calculation Air Flow RatesDocument52 pagesEN15242 Ventilation Calculation Air Flow RatesBrandon LowNo ratings yet
- Adama Science and Technology University School of Applied Natural Science Department of Applied MathematicsDocument9 pagesAdama Science and Technology University School of Applied Natural Science Department of Applied MathematicsALEMAYEHUNo ratings yet
- Proof Hi PDFDocument29 pagesProof Hi PDF孙中体No ratings yet
- Critical-State Soil Mechanics For Dummies: Paul W. Mayne, PHD, P.EDocument22 pagesCritical-State Soil Mechanics For Dummies: Paul W. Mayne, PHD, P.ERazi Mahri0% (1)
- Beam Is Code Crackwidth ValidationDocument1 pageBeam Is Code Crackwidth ValidationNirbhayNo ratings yet
- Qip Ice 31 Stirling EnginesDocument20 pagesQip Ice 31 Stirling EnginesChetanPrajapatiNo ratings yet
- Experimental Comparison of Single and Multistage Air Compressor EfficienciesDocument11 pagesExperimental Comparison of Single and Multistage Air Compressor EfficienciesJohn barry CorpuzNo ratings yet
- REHOLOGYDocument20 pagesREHOLOGYGABRIELLA SOUZANo ratings yet