You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Test On ElectrostaticsDocument4 pagesTest On ElectrostaticsHemendra PrasannaNo ratings yet
- Tan Delta Test - Loss Angle Test - Dissipation Factor Test - Electrical4U PDFDocument10 pagesTan Delta Test - Loss Angle Test - Dissipation Factor Test - Electrical4U PDFDan AndreiNo ratings yet
- 02 IRIS2 - NV - Controller-ENDocument36 pages02 IRIS2 - NV - Controller-ENAhmedNo ratings yet
- Kalka Public School: Holiday HomeworkDocument18 pagesKalka Public School: Holiday HomeworkMohammad UmarNo ratings yet
- MP EM Ass 21: LR, LC, LRC CircuitsDocument16 pagesMP EM Ass 21: LR, LC, LRC CircuitsBlueAstro100% (6)
- Question Bank 1st YearDocument45 pagesQuestion Bank 1st YearAbhishekNo ratings yet
- Design of A Large Area Rectenna For Energy Harvesting Using Ambient RF EnergyDocument24 pagesDesign of A Large Area Rectenna For Energy Harvesting Using Ambient RF EnergyGAUTI2212No ratings yet
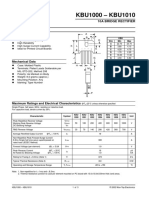
- KBU1000 - KBU1010: FeaturesDocument3 pagesKBU1000 - KBU1010: FeaturesTRUNG Lê ThànhNo ratings yet
- WSC IomDocument36 pagesWSC IomArief100% (2)
- Energy Harvesting Through Dance Floor Using Piezoelectric DeviceDocument5 pagesEnergy Harvesting Through Dance Floor Using Piezoelectric DeviceBelayneh TadesseNo ratings yet
- Intelligent Pressure Transmitter With Control Capability: Operation and Maintenance Instruction / ManualDocument110 pagesIntelligent Pressure Transmitter With Control Capability: Operation and Maintenance Instruction / Manualvembrietto_harsNo ratings yet
- MS 3000 Standard Kit 3 - Technical Data Sheet V 1.0Document3 pagesMS 3000 Standard Kit 3 - Technical Data Sheet V 1.0lxd.hepNo ratings yet
- Lab E1 RLC CircuitDocument11 pagesLab E1 RLC CircuitChing Wai Yong100% (1)
- IC Control Thy - TCA 785Document5 pagesIC Control Thy - TCA 785apriliaa ayuuNo ratings yet
- Chemical Sensors Volume 1: Fundamentals of Sensing Material: General ApproachesDocument74 pagesChemical Sensors Volume 1: Fundamentals of Sensing Material: General ApproachesMomentum Press0% (1)
- Areva Battery MonitorDocument4 pagesAreva Battery MonitorJoseph SumpaicoNo ratings yet
- Capacitance and Inductance of A Parallel Plate Transmission LineDocument2 pagesCapacitance and Inductance of A Parallel Plate Transmission LineBabasrinivas GuduruNo ratings yet
- ch1 Introductiontopq Bev40603Document46 pagesch1 Introductiontopq Bev40603Nur DaniaNo ratings yet
- RC Phase Shift Oscillator Full DerivationDocument12 pagesRC Phase Shift Oscillator Full DerivationPranav Itraj0% (1)
- Magnetiser Range 1 2Document5 pagesMagnetiser Range 1 2api-314773820No ratings yet
- Electric Arc Furnace Power Modeling For STATCOM Controller ApplicationDocument6 pagesElectric Arc Furnace Power Modeling For STATCOM Controller Applicationteektak1No ratings yet
- PAPER 11 EDATool-BasedMethodologyfor ChandrasekarDocument20 pagesPAPER 11 EDATool-BasedMethodologyfor ChandrasekarReynaldo LOERANo ratings yet
- SolutionDPP 3capacitor Kirchhoffs1st2ndLawDocument57 pagesSolutionDPP 3capacitor Kirchhoffs1st2ndLawprachuryaNo ratings yet
- q615 Electrical Electronics and Control EngineeringDocument36 pagesq615 Electrical Electronics and Control Engineeringjustooln2No ratings yet
- Series Resonance Circuits PDFDocument16 pagesSeries Resonance Circuits PDFnpavankNo ratings yet
- AC CircuitsEE 03 01 To EE 03 04 QuestionnaireDocument3 pagesAC CircuitsEE 03 01 To EE 03 04 QuestionnaireCelina RoxasNo ratings yet
- Life ELNA Technical NoteDocument9 pagesLife ELNA Technical NotejohnNo ratings yet
- Safety Precautions in ElectronicsDocument16 pagesSafety Precautions in ElectronicsChezzzzyNo ratings yet
- Capacitance Cheat CodeDocument13 pagesCapacitance Cheat CodeADITYA UPADHYAYNo ratings yet
- (IEEE Format) Design Consideration A Low-Cost Capacitive Sensor For Plantar Pressure Insole - R1Document5 pages(IEEE Format) Design Consideration A Low-Cost Capacitive Sensor For Plantar Pressure Insole - R1WAHYU DWI LESTARINo ratings yet