You might also like
- Clinical Biomechanics - Mechanical Concepts and TermsDocument30 pagesClinical Biomechanics - Mechanical Concepts and Termsmihaela_moldova9128No ratings yet
- Clinical Biomechanics - Basic Factors of Biodynamics and Joint StabilityDocument28 pagesClinical Biomechanics - Basic Factors of Biodynamics and Joint Stabilitymihaela_moldova9128No ratings yet
- Clinical Gait Analysis: Temporal Spatial Parameters and the Gait CycleDocument8 pagesClinical Gait Analysis: Temporal Spatial Parameters and the Gait Cyclemihaela_moldova9128No ratings yet
- Clinical Biomechanics - Body Alignment, Posture, and GaitDocument53 pagesClinical Biomechanics - Body Alignment, Posture, and Gaitmihaela_moldova91280% (1)
- Book - Anthrop and Biomechanics ch14-1 PDFDocument61 pagesBook - Anthrop and Biomechanics ch14-1 PDFmihaela_moldova9128No ratings yet
- Book - Anthrop and Biomechanics ch14-1 PDFDocument61 pagesBook - Anthrop and Biomechanics ch14-1 PDFmihaela_moldova9128No ratings yet
- Prosthetics Lower Limb Catalogue 2012Document292 pagesProsthetics Lower Limb Catalogue 2012mihaela_moldova9128No ratings yet
- Rehabilitation Robotics KrebbsDocument32 pagesRehabilitation Robotics Krebbsmihaela_moldova9128No ratings yet
- ElectrogoniometerDocument4 pagesElectrogoniometermihaela_moldova9128No ratings yet
- Machine Shop Manual PDFDocument86 pagesMachine Shop Manual PDFTrix Gaimo100% (2)
- Guideline For Rehabilitation Lower Limb AmputeesDocument166 pagesGuideline For Rehabilitation Lower Limb Amputeesmihaela_moldova9128100% (1)
- Atlas of Limb Prosthetics - O&P Virtual LibraryDocument600 pagesAtlas of Limb Prosthetics - O&P Virtual Librarymihaela_moldova912867% (3)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Of Course 1 - Dossier de Revisions ConfinementDocument5 pagesOf Course 1 - Dossier de Revisions ConfinementCamNo ratings yet
- Rate Constant Determination 2Document8 pagesRate Constant Determination 2Divya UpadhyayNo ratings yet
- Aam April 2023Document198 pagesAam April 2023Adhitya DewantaraNo ratings yet
- Marketing 5 0Document23 pagesMarketing 5 0gmusicestudioNo ratings yet
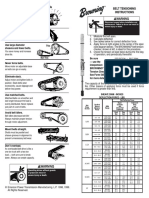
- Browning Belt Tension GaugeDocument2 pagesBrowning Belt Tension GaugeJasperken2xNo ratings yet
- Akbh PSK (V), TRBH As Y: AdhimokṣADocument8 pagesAkbh PSK (V), TRBH As Y: AdhimokṣA张晓亮No ratings yet
- Common Carrier RulingDocument4 pagesCommon Carrier RulingChic PabalanNo ratings yet
- Bathymetry and Its Applications PDFDocument158 pagesBathymetry and Its Applications PDFArseni MaximNo ratings yet
- Ahmed Ali Alshehri Mobile 00966-508-217284 Address: P.O.Box 70132 Zipcode:31952 Riyadh Street, Al-Khobar, Saudi ArabiaDocument9 pagesAhmed Ali Alshehri Mobile 00966-508-217284 Address: P.O.Box 70132 Zipcode:31952 Riyadh Street, Al-Khobar, Saudi ArabiaShah KhalidNo ratings yet
- Booklet English 2016Document17 pagesBooklet English 2016Noranita ZakariaNo ratings yet
- ISO 14000 - WikipediaDocument5 pagesISO 14000 - WikipediaalexokorieNo ratings yet
- GypsumDocument79 pagesGypsumMansi GirotraNo ratings yet
- DesignDocument2 pagesDesignAmr AbdalhNo ratings yet
- Alaina W - Food Project ReflectionDocument1 pageAlaina W - Food Project Reflectionapi-438601399No ratings yet
- Water Spray Nozzle: Fire Fighting Equipment Data SheetDocument7 pagesWater Spray Nozzle: Fire Fighting Equipment Data SheetJosef MadronaNo ratings yet
- Global Resort List by Country (38 charactersDocument51 pagesGlobal Resort List by Country (38 charactersMaulik ShahNo ratings yet
- 4.2 - Traditional Double-Walled HapaDocument25 pages4.2 - Traditional Double-Walled HapaThakur VeeruNo ratings yet
- EVS Complete Notes PDFDocument148 pagesEVS Complete Notes PDFrevantrajkpdh2002No ratings yet
- Solvent Extraction: Please Submit Question 4 For MarkingDocument3 pagesSolvent Extraction: Please Submit Question 4 For MarkingThembi Matebula100% (1)
- Matrox DSX Le4Document76 pagesMatrox DSX Le4doc docNo ratings yet
- Definisi, Karakteristik dan Contoh Aplikasi SIGDocument28 pagesDefinisi, Karakteristik dan Contoh Aplikasi SIGtoyota taaNo ratings yet
- 9th Mole Concept and Problems Based On PDFDocument2 pages9th Mole Concept and Problems Based On PDFMintu KhanNo ratings yet
- Assignment 12Document7 pagesAssignment 12Anonymous mqIqN5zNo ratings yet
- White Lies - Core RulebookDocument136 pagesWhite Lies - Core RulebookThiago AlmeidaNo ratings yet
- Zooniverse Book 2022Document28 pagesZooniverse Book 2022Dr Pankaj DhussaNo ratings yet
- Impex Kitchen Appliances PDFDocument4 pagesImpex Kitchen Appliances PDFqwqw11No ratings yet
- GREEN AIR CONDITIONER Mechanical Presentation TopicsDocument9 pagesGREEN AIR CONDITIONER Mechanical Presentation TopicsCerin91No ratings yet
- What Is The Kingdom of GodDocument10 pagesWhat Is The Kingdom of GodSunil ChelladuraiNo ratings yet
- Care of Unconscious Nursing LessonDocument7 pagesCare of Unconscious Nursing LessonYendrembam Taruni90% (10)
- Fi & EiDocument3 pagesFi & EiPrasanna S Kulkarni100% (1)