You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- MAE546 Lecture 3Document15 pagesMAE546 Lecture 3Shivan BiradarNo ratings yet
- Time-Continous Stochastic Processes 0. Time Continous Stochastic ProcessesDocument10 pagesTime-Continous Stochastic Processes 0. Time Continous Stochastic ProcessesHuy DuNo ratings yet
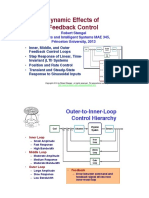
- Feedback Control Loop: Target yDocument37 pagesFeedback Control Loop: Target yozcagNo ratings yet
- LT I Differential Equations: y (T) L (Y (S) ) C(S) R(S) G(S) Q(S) R(S) C(S) Initial Condition PolynomialDocument8 pagesLT I Differential Equations: y (T) L (Y (S) ) C(S) R(S) G(S) Q(S) R(S) C(S) Initial Condition Polynomialbob3173No ratings yet
- Introduction To Discrete Time Systems and The Z TransformDocument93 pagesIntroduction To Discrete Time Systems and The Z TransformRaufzha AnandaNo ratings yet
- Communicati N Systems: Prof. Wonjae ShinDocument33 pagesCommunicati N Systems: Prof. Wonjae Shin이동준No ratings yet
- EL-4701 Modelos de Sistemas: FormularioDocument9 pagesEL-4701 Modelos de Sistemas: FormularioEmmanuel AcostaNo ratings yet
- Digital Filters and z-Transform Frequency AnalysisDocument45 pagesDigital Filters and z-Transform Frequency AnalysisSwathi KalagatlaNo ratings yet
- Control System and Automationmae345lecture7Document17 pagesControl System and Automationmae345lecture7JOHNNo ratings yet
- Lecture 10Document8 pagesLecture 10EdutamNo ratings yet
- Signals and Systems FormulasDocument3 pagesSignals and Systems FormulasKPRBTNo ratings yet
- Communication IITN Review1Document28 pagesCommunication IITN Review1Pankaj MeenaNo ratings yet
- Video Segment: ControlDocument14 pagesVideo Segment: ControliavramovNo ratings yet
- Linear System Theory and Design: Taesam KangDocument42 pagesLinear System Theory and Design: Taesam KangFiriceNguyenNo ratings yet
- Laplace TransformationDocument10 pagesLaplace TransformationAhasan UllaNo ratings yet
- Modeling and classification of disturbances in control systemsDocument47 pagesModeling and classification of disturbances in control systemsวินัย เมธาวิทิตNo ratings yet
- LAPLACE TRANSFORM CIRCUIT ANALYSISDocument56 pagesLAPLACE TRANSFORM CIRCUIT ANALYSISSando CrisiasaNo ratings yet
- S To Chas Tic ProcessesDocument16 pagesS To Chas Tic ProcessesSeham RaheelNo ratings yet
- Spectral factorization of random processesDocument24 pagesSpectral factorization of random processesSamson ImmanuelNo ratings yet
- Unit 6: 1. Explain The Classification of Random Process With Neat Sketches. AnsDocument12 pagesUnit 6: 1. Explain The Classification of Random Process With Neat Sketches. Anssrinivas0% (1)
- Z TransformDocument22 pagesZ TransformcivaasNo ratings yet
- Digital Control Systems z-Transform AnalysisDocument22 pagesDigital Control Systems z-Transform Analysisvignanaraj100% (1)
- Calculus BookletDocument6 pagesCalculus Bookletangie81No ratings yet
- Eee2035F Exam Signals and Systems I: University of Cape Town Department of Electrical EngineeringDocument3 pagesEee2035F Exam Signals and Systems I: University of Cape Town Department of Electrical EngineeringRubia IftikharNo ratings yet
- Dynamic ExcitationsDocument23 pagesDynamic ExcitationsRaquel CarmonaNo ratings yet
- Signals and Systems Using Matlab Chapter 5 - Frequency Analysis: The Fourier TransformDocument25 pagesSignals and Systems Using Matlab Chapter 5 - Frequency Analysis: The Fourier TransformDiluNo ratings yet
- Modern Control Lec2Document19 pagesModern Control Lec2Saad FaruquiNo ratings yet
- I-1 DSP Review - 2007Document30 pagesI-1 DSP Review - 2007maxxtorr723No ratings yet
- Fourier Transform TablesDocument9 pagesFourier Transform TablesOrder17No ratings yet
- Introduction To Simulation - Lecture 16: Methods For Computing Periodic Steady-State - Part IIDocument32 pagesIntroduction To Simulation - Lecture 16: Methods For Computing Periodic Steady-State - Part IIHenrique Mariano AmaralNo ratings yet
- Sampling and ReconstructionDocument21 pagesSampling and ReconstructionLuis Miguel BarrenoNo ratings yet
- Ch. 1: Review of ProbabilityDocument19 pagesCh. 1: Review of ProbabilityKyusang ParkNo ratings yet
- Control Systems Lab - SC4070: DR - Ir. Alessandro AbateDocument39 pagesControl Systems Lab - SC4070: DR - Ir. Alessandro AbatemakroumNo ratings yet
- State Space Description of A Dynamic System: 1. Linear CaseDocument8 pagesState Space Description of A Dynamic System: 1. Linear CaseAnonymous N2c1CpNo ratings yet
- Zarchan-Lecture Kalman Filter9Document104 pagesZarchan-Lecture Kalman Filter9larasmoyoNo ratings yet
- ECE 414 Tutorial 1: Review: Random Process Fourier Transform OuetasoDocument16 pagesECE 414 Tutorial 1: Review: Random Process Fourier Transform OuetasosaiknaramNo ratings yet
- ELG4152L305Document33 pagesELG4152L305Rahul GalaNo ratings yet
- Discrete-Time Signals and SystemsDocument111 pagesDiscrete-Time Signals and Systemsduraivel_anNo ratings yet
- Maths for Petroleum Engineering EssentialsDocument73 pagesMaths for Petroleum Engineering EssentialsadobiNo ratings yet
- Fourier Analysis for Image and Video ProcessingDocument17 pagesFourier Analysis for Image and Video ProcessingarrowzyNo ratings yet
- Ec2 4Document40 pagesEc2 4masudul9islamNo ratings yet
- Base ExcitationDocument24 pagesBase ExcitationBenjamin VazquezNo ratings yet
- Expected Values Expected Values: Alberto SuárezDocument6 pagesExpected Values Expected Values: Alberto SuárezVladimiro Ibañez QuispeNo ratings yet
- Curve sketching and analysisDocument3 pagesCurve sketching and analysisZach FergerNo ratings yet
- Discrete Signals and SystemsDocument111 pagesDiscrete Signals and SystemsharivarahiNo ratings yet
- Derivatives Formula Sheet CondensedDocument1 pageDerivatives Formula Sheet CondensedintegralCALCNo ratings yet
- 1 Random Processes: " " Is Considered An Important Background To Communication StudyDocument239 pages1 Random Processes: " " Is Considered An Important Background To Communication StudyPretty FibberNo ratings yet
- Frequency Response of Lsi SystemsDocument30 pagesFrequency Response of Lsi SystemsAbhilash GhanoreNo ratings yet
- The Convolution Integral: D T H X T H T X T yDocument39 pagesThe Convolution Integral: D T H X T H T X T yshahriaraustNo ratings yet
- Linearization and Stability in SimulinkDocument5 pagesLinearization and Stability in SimulinkPhạm Ngọc HòaNo ratings yet
- Ee263 Ps1 SolDocument11 pagesEe263 Ps1 SolMorokot AngelaNo ratings yet
- Lab Report #2: KeywordsDocument8 pagesLab Report #2: KeywordsIjaz AhmadNo ratings yet
- Bayes Filter Reminder: Bel (X P (X Bel (XDocument26 pagesBayes Filter Reminder: Bel (X P (X Bel (XTaimoor ShakeelNo ratings yet
- Signals and Systems Using Matlab Chapter 6 - Application of Laplace Analysis To ControlDocument22 pagesSignals and Systems Using Matlab Chapter 6 - Application of Laplace Analysis To ControlDiluNo ratings yet
- KOM 3781 - Discrete-Time Control Systems Sampled SignalsDocument38 pagesKOM 3781 - Discrete-Time Control Systems Sampled SignalsFatih CanbolatNo ratings yet
- Lecture # 4: Communication SystemsDocument17 pagesLecture # 4: Communication SystemsKhalid MajeedNo ratings yet
- Chapter 4Document39 pagesChapter 4Joseph IbrahimNo ratings yet
- Control Conferences in 2021Document8 pagesControl Conferences in 2021Shivan BiradarNo ratings yet
- Data Driven ControlDocument6 pagesData Driven ControlShivan BiradarNo ratings yet
- Basic Preparation For PHDDocument11 pagesBasic Preparation For PHDShivan BiradarNo ratings yet
- ObservationsDocument1 pageObservationsShivan BiradarNo ratings yet
- Ashtavakra Gita - Sanskrit Text With English Transliteration & TranslationDocument142 pagesAshtavakra Gita - Sanskrit Text With English Transliteration & TranslationJyoti Dwivedi100% (3)
- Mle 090Document1 pageMle 090Shivan BiradarNo ratings yet
- Morressier Poster Template PowerPointDocument1 pageMorressier Poster Template PowerPointShivan BiradarNo ratings yet
- Ieee Contingency GrantDocument1 pageIeee Contingency GrantShivan BiradarNo ratings yet
- Kalman FilterDocument1 pageKalman FilterShivan BiradarNo ratings yet
- Limiter DataDocument7 pagesLimiter DataShivan BiradarNo ratings yet
- Mle 090Document1 pageMle 090Shivan BiradarNo ratings yet
- Lecture - 01 - Introduction & MotivationDocument21 pagesLecture - 01 - Introduction & MotivationShivan BiradarNo ratings yet
- 2003 Bailliere PaciniDocument18 pages2003 Bailliere PaciniShivan BiradarNo ratings yet
- Maximum Likelihood Estimation (MLE) : Type Equation Here.000Document15 pagesMaximum Likelihood Estimation (MLE) : Type Equation Here.000Shivan BiradarNo ratings yet
- Matlab QuestionsDocument3 pagesMatlab QuestionsShivan BiradarNo ratings yet
- UepDocument4 pagesUepShivan BiradarNo ratings yet
- M. Tech. 1st Semester (PGEE-109) - Energy Management and Audit - 2012Document4 pagesM. Tech. 1st Semester (PGEE-109) - Energy Management and Audit - 2012Shivan BiradarNo ratings yet
- ConsolidatedDocument21 pagesConsolidatedShivan BiradarNo ratings yet
- SFG LCT 5th SemDocument59 pagesSFG LCT 5th SemShivan BiradarNo ratings yet
- A User-Friendly Demonstration of Principal Components Analysis as a Data Reduction MethodDocument39 pagesA User-Friendly Demonstration of Principal Components Analysis as a Data Reduction Methodsteven231191No ratings yet
- Errata ICPACEDocument1 pageErrata ICPACEShivan BiradarNo ratings yet
- Chapter 1 Introduction To Large-Scale SystemsDocument7 pagesChapter 1 Introduction To Large-Scale SystemsShivan BiradarNo ratings yet
- Stability B LDocument14 pagesStability B LShivan BiradarNo ratings yet
- Figure 1-1 Basic Gates: A B C A B C And: C A B Or: C A + BDocument39 pagesFigure 1-1 Basic Gates: A B C A B C And: C A B Or: C A + BbikisahuNo ratings yet
- By Karl J. Åström, Richard E. Klein, and Anders LennartssonDocument22 pagesBy Karl J. Åström, Richard E. Klein, and Anders LennartssonShivan BiradarNo ratings yet
- Robust PID Controllers for Time Delay SystemsDocument6 pagesRobust PID Controllers for Time Delay SystemsShivan BiradarNo ratings yet
- Multiobj HandoutDocument27 pagesMultiobj HandoutShivan BiradarNo ratings yet
- Reviewers CommentDocument1 pageReviewers CommentShivan BiradarNo ratings yet
- Writing An Abstract PDFDocument4 pagesWriting An Abstract PDFroisNo ratings yet
- Wiley - Wooldridge An Introduction To Multi Agent Systems (OCR Guaranteed On Full Book)Document365 pagesWiley - Wooldridge An Introduction To Multi Agent Systems (OCR Guaranteed On Full Book)leor2k367% (3)
- Vapor Pressure Experiment Data AnalysisDocument3 pagesVapor Pressure Experiment Data AnalysisRanaNo ratings yet
- Mohr's Circle Analysis of Rock Failure Under StressDocument26 pagesMohr's Circle Analysis of Rock Failure Under StressNitishNo ratings yet
- UML Modeling and Performance Evaluation of Multithreaded Programs On Dual Core ProcessorDocument10 pagesUML Modeling and Performance Evaluation of Multithreaded Programs On Dual Core ProcessorseravanakumarNo ratings yet
- Documentation For: Bank - MasterDocument6 pagesDocumentation For: Bank - MastervijucoolNo ratings yet
- Psan en Tcd210185ab 20220523 Inst WDocument2 pagesPsan en Tcd210185ab 20220523 Inst Wsinar automationNo ratings yet
- Maintenance Manual: Models 7200/7300/7310 Reach-Fork TrucksDocument441 pagesMaintenance Manual: Models 7200/7300/7310 Reach-Fork TrucksMigue Angel Rodríguez Castro100% (2)
- P0562-Battery Voltage LowDocument7 pagesP0562-Battery Voltage Lowguillermoal539100% (1)
- Software Development Handbook Transforming For The Digital Age PDFDocument75 pagesSoftware Development Handbook Transforming For The Digital Age PDFdreamer4077No ratings yet
- Distillation Is Defined As:: How Does Distillation Work?Document35 pagesDistillation Is Defined As:: How Does Distillation Work?sankalpnambiarNo ratings yet
- PBM and PBZ Crown Techniques ComparedDocument6 pagesPBM and PBZ Crown Techniques ComparedDonanguyenNo ratings yet
- SPE143315-Ultrasound Logging Techniques For The Inspection of Sand Control Screen IntegrityDocument18 pagesSPE143315-Ultrasound Logging Techniques For The Inspection of Sand Control Screen IntegrityYovaraj KarunakaranNo ratings yet
- Evolution of Oilfield BatteriesDocument16 pagesEvolution of Oilfield BatteriesPasquale CutriNo ratings yet
- Manual de TallerDocument252 pagesManual de TallerEdison RodriguezNo ratings yet
- Standing Waves Worksheet SolutionsDocument6 pagesStanding Waves Worksheet SolutionsMaher TrabelsiNo ratings yet
- University Institute of Information Technology: Ouick Learn - MCQDocument53 pagesUniversity Institute of Information Technology: Ouick Learn - MCQvimalNo ratings yet
- Grade CalculatorDocument1 pageGrade CalculatorKHENN ALDIANONo ratings yet
- Applications of The Infrared Thermography in The Energy Audit of Buildings - A ReviewDocument14 pagesApplications of The Infrared Thermography in The Energy Audit of Buildings - A ReviewDian PsdNo ratings yet
- Multisite ErpDocument5 pagesMultisite ErparavindhsekarNo ratings yet
- DP TV Aver 15022 DriversDocument94 pagesDP TV Aver 15022 DriversMohammed Tahver Farooqi QuadriNo ratings yet
- Colorado Passenger Tramway Safety Board Adam Lee Accident ReportDocument28 pagesColorado Passenger Tramway Safety Board Adam Lee Accident ReportMichael_Lee_RobertsNo ratings yet
- Asphalt Institute PresentationDocument43 pagesAsphalt Institute PresentationMax Cedeño De LeónNo ratings yet
- CV Software Engineer Sarika DhingraDocument2 pagesCV Software Engineer Sarika DhingravirenderbishnoiNo ratings yet
- Categoria ApiDocument61 pagesCategoria ApiHector MARTINEZ DEL ANGELNo ratings yet
- Digital Transformation in The Age of The Customer POVDocument12 pagesDigital Transformation in The Age of The Customer POVjasmineNo ratings yet
- GE Lighting Systems Crane Mounted Luminaire Series Spec Sheet 3-81Document2 pagesGE Lighting Systems Crane Mounted Luminaire Series Spec Sheet 3-81Alan MastersNo ratings yet
- 9040 - User ManualDocument236 pages9040 - User ManualWallie Billingsley77% (13)
- Wacker Silres Ren - 60 - Silicone Resin Solution For Medium Solids or High Solids Heat ResistancDocument3 pagesWacker Silres Ren - 60 - Silicone Resin Solution For Medium Solids or High Solids Heat ResistancJameel AhsanNo ratings yet
- IEEE Modeling of Generator Controls For Coordinating Generator Relays Draft 4.0Document65 pagesIEEE Modeling of Generator Controls For Coordinating Generator Relays Draft 4.0Alex PANo ratings yet
- ANSI-IsA 77.13.01-1999 Fossil Fuel Power Plant Steam Turbine Bypass SystemDocument42 pagesANSI-IsA 77.13.01-1999 Fossil Fuel Power Plant Steam Turbine Bypass SystemArzu AkarNo ratings yet
- Technical Information HANSA-FLEX Hose ConnectionsDocument75 pagesTechnical Information HANSA-FLEX Hose ConnectionshorsanicuNo ratings yet