You might also like
- Adaptive Control Design and AnalysisDocument45 pagesAdaptive Control Design and Analysishind90No ratings yet
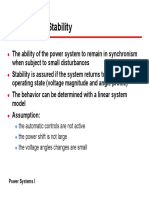
- Steady State Stability PDFDocument12 pagesSteady State Stability PDFAvijit AdhikaryNo ratings yet
- Lecture 17Document21 pagesLecture 17narvan.m31No ratings yet
- Experiment No. 2: A. Aim: B. Software To Be Used: C. Equation To Be UsedDocument3 pagesExperiment No. 2: A. Aim: B. Software To Be Used: C. Equation To Be UsedAditya TiwariNo ratings yet
- FFTDocument28 pagesFFTFan Wang100% (2)
- Laplace Transform ExamplesDocument5 pagesLaplace Transform ExamplesLeonard PhilipNo ratings yet
- Patrick Shin Final ReportDocument42 pagesPatrick Shin Final Reportsumon devNo ratings yet
- Schrodinger FDTDDocument5 pagesSchrodinger FDTDHoussam OubahaNo ratings yet
- Lect 37Document16 pagesLect 37zafrin zaraNo ratings yet
- ECE330 Fall 16 Lecture4 PDFDocument10 pagesECE330 Fall 16 Lecture4 PDFPhùng Đức AnhNo ratings yet
- Chapter 4Document39 pagesChapter 4Joseph IbrahimNo ratings yet
- 99b Statistical FieldsDocument4 pages99b Statistical FieldsGerman ChiappeNo ratings yet
- Stationary Wave EquationDocument9 pagesStationary Wave EquationCamilo Betancourth BolivarNo ratings yet
- Assignment: Small Signal Stability: Task1Document13 pagesAssignment: Small Signal Stability: Task1Nouman ChoudhryNo ratings yet
- MATH4052 - Partial Differential Equations: Wave EquationDocument9 pagesMATH4052 - Partial Differential Equations: Wave EquationJohn ChanNo ratings yet
- Appendix A. The DQ TransformationDocument8 pagesAppendix A. The DQ TransformationtiagokjNo ratings yet
- Lab Report #1: Transient Stability Analysis For Single Machine Infinite Bus Bar Using MATLABDocument5 pagesLab Report #1: Transient Stability Analysis For Single Machine Infinite Bus Bar Using MATLABIjaz AhmadNo ratings yet
- FluidmechanicsDocument62 pagesFluidmechanicsNadiaa AdjoviNo ratings yet
- Lecture - 36: Wave Propagation in Continuum SystemDocument4 pagesLecture - 36: Wave Propagation in Continuum SystemgauthamNo ratings yet
- On The Riemann Hypothesis, Complex Scalings and Logarithmic Time ReversalDocument42 pagesOn The Riemann Hypothesis, Complex Scalings and Logarithmic Time ReversalLAVISH CHHABRANo ratings yet
- Assignment 3Document15 pagesAssignment 3Jofy GeorgeNo ratings yet
- PDE Notes2Document50 pagesPDE Notes2MaheshNo ratings yet
- Simple Harmonic Motion: 8.01 Week 12D1Document23 pagesSimple Harmonic Motion: 8.01 Week 12D1Deepak AwasthiNo ratings yet
- Answers to Selected Exercises from Differential Equations TextbookDocument9 pagesAnswers to Selected Exercises from Differential Equations TextbookbalterNo ratings yet
- Channel Impulse Response and Multipath EffectsDocument13 pagesChannel Impulse Response and Multipath EffectsNguyễn ThắngNo ratings yet
- DampedDocument11 pagesDampedAnkitNo ratings yet
- 63ufrep 13.EC FullSyllabusPaper-II (Solutions)Document42 pages63ufrep 13.EC FullSyllabusPaper-II (Solutions)Saty Prakash YadavNo ratings yet
- Lecture #1 Today's ProgramDocument4 pagesLecture #1 Today's ProgramCainãNo ratings yet
- Study Unit 2Document15 pagesStudy Unit 2Gontse SempaNo ratings yet
- DYNAMIC RESPONSEDocument12 pagesDYNAMIC RESPONSECH20B020 SHUBHAM BAPU SHELKENo ratings yet
- DegeneracyDocument4 pagesDegeneracypradeep khannaNo ratings yet
- Finite Difference Modeling of Acoustic Waves in Matlab: XZT T VXZ XZTDocument19 pagesFinite Difference Modeling of Acoustic Waves in Matlab: XZT T VXZ XZTHajar Ben GaraâNo ratings yet
- Exam Vibrations and NoiseDocument5 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- Lecture 8Document23 pagesLecture 8Jarom SaavedraNo ratings yet
- Frequency Response Analysis: Karl D. Hammond January 2008Document14 pagesFrequency Response Analysis: Karl D. Hammond January 2008Trixie NuylesNo ratings yet
- Lecture # 23: Subject No. PH11003 (Physics of Waves) Duration: 2 HRDocument14 pagesLecture # 23: Subject No. PH11003 (Physics of Waves) Duration: 2 HRdomagix470No ratings yet
- sint_cl05Document4 pagessint_cl05Khhg AgddsNo ratings yet
- Lpde 202Document2 pagesLpde 202mathphys21No ratings yet
- A Short Report On MATLAB Implementation of The Girsanov Transformation For Reliability AnalysisDocument8 pagesA Short Report On MATLAB Implementation of The Girsanov Transformation For Reliability AnalysisYoung EngineerNo ratings yet
- Note 2Document3 pagesNote 2bananafish88No ratings yet
- Mathematical Modeling and Computation in FinanceDocument4 pagesMathematical Modeling and Computation in FinanceĐạo Ninh ViệtNo ratings yet
- Chapter 13Document15 pagesChapter 13nkoreisha7752No ratings yet
- Regularization of Derivatives by Fractional VelocityDocument5 pagesRegularization of Derivatives by Fractional VelocityDimiter ProdanovNo ratings yet
- Lecture 6Document28 pagesLecture 6Jarom SaavedraNo ratings yet
- MA1013 Math Course OverviewDocument2 pagesMA1013 Math Course OverviewKaveesha DinamiduNo ratings yet
- Damped Vibration: Viscous and Coulomb DampingDocument14 pagesDamped Vibration: Viscous and Coulomb DampingEmmanuel KutaniNo ratings yet
- Full Solutions Manual For Engineering Vibration 4Th by Inman 0132871696 PDF Docx Full Chapter ChapterDocument36 pagesFull Solutions Manual For Engineering Vibration 4Th by Inman 0132871696 PDF Docx Full Chapter Chaptercrawlhoggery7htt100% (16)
- Full Download Solutions Manual For Engineering Vibration 4th by Inman 0132871696 PDF Full ChapterDocument36 pagesFull Download Solutions Manual For Engineering Vibration 4th by Inman 0132871696 PDF Full Chapterpolelessfeck8avz100% (16)
- Jackson 6.1 Homework Problem SolutionDocument4 pagesJackson 6.1 Homework Problem SolutionMatheus FagundesNo ratings yet
- Rectifiers, Clippers and Clampers: March 2018Document22 pagesRectifiers, Clippers and Clampers: March 2018الزهور لخدمات الانترنيتNo ratings yet
- Jackson 6.1 Homework Problem SolutionDocument4 pagesJackson 6.1 Homework Problem SolutionJavierNo ratings yet
- Sol 6Document5 pagesSol 6Luis ZambranoNo ratings yet
- Numerical Methods: Marisa Villano, Tom Fagan, Dave Fairburn, Chris Savino, David Goldberg, Daniel RaveDocument44 pagesNumerical Methods: Marisa Villano, Tom Fagan, Dave Fairburn, Chris Savino, David Goldberg, Daniel RavePrajwalNo ratings yet
- Electromechanics of A Solenoid MatlabDocument5 pagesElectromechanics of A Solenoid MatlabsnthejNo ratings yet
- Chapter 10Document21 pagesChapter 10StefanPerendijaNo ratings yet
- Risk measures and models for financial marketsDocument2 pagesRisk measures and models for financial marketsnathanNo ratings yet
- Frequency Domain Analysis of Dynamic Systems: Jos E C. GeromelDocument43 pagesFrequency Domain Analysis of Dynamic Systems: Jos E C. Geromelblister_xbladeNo ratings yet
- AEP 3330 Final - Some EquationsDocument1 pageAEP 3330 Final - Some EquationsJesse ZhangNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Power Factor Improvement Chapter#6Document16 pagesPower Factor Improvement Chapter#6Ijaz AhmadNo ratings yet
- PHEC Innovation Expo 2022 invitationDocument1 pagePHEC Innovation Expo 2022 invitationIjaz Ahmad100% (1)
- Lab Report#03 Load Frequency Control of Single Machine System Single AreaDocument3 pagesLab Report#03 Load Frequency Control of Single Machine System Single AreaIjaz AhmadNo ratings yet
- Lab Report Transient Stability Analysis of Single Machine Infinite Bus (SMIB) SystemDocument3 pagesLab Report Transient Stability Analysis of Single Machine Infinite Bus (SMIB) SystemIjaz AhmadNo ratings yet
- Lab Report #1: Transient Stability Analysis For Single Machine Infinite Bus Bar Using MATLABDocument5 pagesLab Report #1: Transient Stability Analysis For Single Machine Infinite Bus Bar Using MATLABIjaz AhmadNo ratings yet
- Untitled FormDocument3 pagesUntitled FormIjaz AhmadNo ratings yet
- Ali Raza (Rp-17-Ee-407)Document7 pagesAli Raza (Rp-17-Ee-407)Ijaz AhmadNo ratings yet
- Procedure For Ms Admission in FranceDocument4 pagesProcedure For Ms Admission in FranceIjaz AhmadNo ratings yet
- Timetable 6th Sem RP19 (Power)Document1 pageTimetable 6th Sem RP19 (Power)Ijaz AhmadNo ratings yet
- CFP Inmic2022Document1 pageCFP Inmic2022Ijaz AhmadNo ratings yet
- Design electric lifting motor for 500kg bridge craneDocument7 pagesDesign electric lifting motor for 500kg bridge craneIjaz AhmadNo ratings yet
- Sports Gala Points TableDocument1 pageSports Gala Points TableMuhammad YousifNo ratings yet
- Power Electronics-MinDocument73 pagesPower Electronics-MinIjaz AhmadNo ratings yet
- Boost Your Reach with Google AdsDocument1 pageBoost Your Reach with Google AdsIjaz AhmadNo ratings yet
- RP18-EE-427 Mujahid HussainDocument6 pagesRP18-EE-427 Mujahid HussainIjaz AhmadNo ratings yet
- PsyEngAssignmentDocument6 pagesPsyEngAssignmentIjaz AhmadNo ratings yet
- Certificate of Completion: Ralgo Industries IncorporatedDocument6 pagesCertificate of Completion: Ralgo Industries IncorporatedElton EvangelistaNo ratings yet
- (30 Disember) FK Jadual Peperiksaan Akhir Dan Pengawasan Semester 1 Sesi 2022-2023Document3 pages(30 Disember) FK Jadual Peperiksaan Akhir Dan Pengawasan Semester 1 Sesi 2022-2023NazrinNo ratings yet
- Controlled Document Lazy River Manual Provides Technical Specifications, Installation, and Maintenance InstructionsDocument43 pagesControlled Document Lazy River Manual Provides Technical Specifications, Installation, and Maintenance InstructionsLove FebNo ratings yet
- Empowerment Technology Quarter 1 Week 2Document12 pagesEmpowerment Technology Quarter 1 Week 2BananaNo ratings yet
- Principles of Electricity: Cf:o - .JDocument73 pagesPrinciples of Electricity: Cf:o - .JNina GalesteNo ratings yet
- Terraform Azure Cheat SheetDocument2 pagesTerraform Azure Cheat SheetGurnam_Singh_69980% (1)
- Slim Interface Relays: FeaturesDocument122 pagesSlim Interface Relays: FeaturesKyaw Kyaw WinNo ratings yet
- Shakil e Zoitl - 2020 - Towards A Modular Architecture For Industrial HMIsDocument5 pagesShakil e Zoitl - 2020 - Towards A Modular Architecture For Industrial HMIsRodrigo Sanches MianiNo ratings yet
- Object Oriented Programming Project ReportDocument18 pagesObject Oriented Programming Project ReportSarthak Sb100% (1)
- Discrete Mathamethics: Algorithm Makes Google Map PossibleDocument16 pagesDiscrete Mathamethics: Algorithm Makes Google Map Possiblechetan jangirNo ratings yet
- Are Harmonics Still A Problem in Data CentersDocument11 pagesAre Harmonics Still A Problem in Data CentersAnonymous dM4QtbCJ0No ratings yet
- SkyAir R410 Inv Cooling EDMT281537 PDFDocument524 pagesSkyAir R410 Inv Cooling EDMT281537 PDFAnh Thu Mai100% (2)
- SRG 3352Document2 pagesSRG 3352Mohamed SabryNo ratings yet
- S12 Relay: ShoriDocument5 pagesS12 Relay: ShoriY. Leonel MolinaNo ratings yet
- Ebook Business Continuity PlanningDocument14 pagesEbook Business Continuity Planningapi-464002100No ratings yet
- Switch With Ans &explDocument80 pagesSwitch With Ans &explTasleem ArifNo ratings yet
- Las Activities q2Document3 pagesLas Activities q2Anna Jane AdanNo ratings yet
- Description Features: LTC3861 Dual, Multiphase Step-Down Voltage Mode DC/DC Controller With Accurate Current SharingDocument36 pagesDescription Features: LTC3861 Dual, Multiphase Step-Down Voltage Mode DC/DC Controller With Accurate Current SharingrotenolabsNo ratings yet
- The Java TutorialDocument2 pagesThe Java TutorialWemphy AjaaNo ratings yet
- Compiler Design-Short NotesDocument61 pagesCompiler Design-Short Notesambachew tarekegnNo ratings yet
- Cs101 Midterm Solved Paper With ReferenceDocument5 pagesCs101 Midterm Solved Paper With ReferenceAqsa AhsanNo ratings yet
- CH 2 - Op-Amp ApplicationDocument52 pagesCH 2 - Op-Amp Applicationknighthood4all100% (2)
- PT. Falcon Prima Tehnik: Permintaan Pengadaan BarangDocument7 pagesPT. Falcon Prima Tehnik: Permintaan Pengadaan BarangGilang Raka Prima FebriantoNo ratings yet
- International Journal of Multimedia and Ubiquitous EngineeringDocument10 pagesInternational Journal of Multimedia and Ubiquitous EngineeringPeter Osundwa KitekiNo ratings yet
- Unit - IiiDocument41 pagesUnit - IiiJit Agg0% (1)
- Axis Statement Kirandeep KaurDocument2 pagesAxis Statement Kirandeep KaurTanvi DhingraNo ratings yet
- CASS30 Rev 0 - CASS Scheme CertificatesDocument3 pagesCASS30 Rev 0 - CASS Scheme Certificates최재호No ratings yet
- EcoStruxure™ Building Operation - B3624Document2 pagesEcoStruxure™ Building Operation - B3624Walter BarbaNo ratings yet
- WLSTGDocument92 pagesWLSTGevakingsNo ratings yet
- SWR Meter Nv103aDocument1 pageSWR Meter Nv103aRajan KumarNo ratings yet