You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Expand IDS Company's Network: I. ProblemsDocument8 pagesExpand IDS Company's Network: I. Problemshqthang19952602No ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Review For Midterm TestDocument1 pageReview For Midterm Testhqthang19952602No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Seminar Rubrics - How To Assess Process Tasks?: What Is A Rubric?Document2 pagesSeminar Rubrics - How To Assess Process Tasks?: What Is A Rubric?hqthang19952602No ratings yet
- Problems 1 2Document5 pagesProblems 1 2hqthang19952602No ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Adequate Set of Connectives: Lila KariDocument30 pagesAdequate Set of Connectives: Lila KariSilver BulletNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Solution For All Problems in Chapter 9Document3 pagesSolution For All Problems in Chapter 9hqthang199526020% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Business Pre Intermediate Unit 1 Students BookDocument13 pagesThe Business Pre Intermediate Unit 1 Students Bookpivapivapiva100% (3)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Market Survey On Copper PDFDocument210 pagesMarket Survey On Copper PDFmujib uddin siddiquiNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Demystifying VPN'S: A White Paper Created by Mohit MadhokDocument7 pagesDemystifying VPN'S: A White Paper Created by Mohit Madhokkirangs029No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Full Forms Related Tto MobileDocument2 pagesFull Forms Related Tto MobileAKSHAJ BAJAJNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Waterproof JSN-SR04T Ultrasonic Distance Sensor With Arduino TutorialDocument33 pagesWaterproof JSN-SR04T Ultrasonic Distance Sensor With Arduino TutorialPreethi ShinyNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- ZXSDR UniRAN FDD-LTE Base Station (V3.10.20) Radio Parameter ReferenceDocument505 pagesZXSDR UniRAN FDD-LTE Base Station (V3.10.20) Radio Parameter Referencedinzo ccsiNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Pro Avl Asia November December 2023Document106 pagesPro Avl Asia November December 2023palashNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- CISCO-7 Data Link LayerDocument27 pagesCISCO-7 Data Link LayerPraveen KumarNo ratings yet
- Touchwin Connection ManualDocument146 pagesTouchwin Connection Manualfiras husseinNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Pre-Labs: (EE-455) Electrical Power System ProtectionDocument4 pagesPre-Labs: (EE-455) Electrical Power System ProtectionJurair SaqibNo ratings yet
- ThinkPad L460 Platform SpecificationsDocument1 pageThinkPad L460 Platform SpecificationsAket LohiaNo ratings yet
- Hard Rev Limiter 1.2Document15 pagesHard Rev Limiter 1.2riccardoNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- EEG Backgnd HistoryDocument5 pagesEEG Backgnd Historyzelin99No ratings yet
- FMX 004 DatasheetDocument2 pagesFMX 004 DatasheetHuy HeinekenNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- GSM Based Vending MachineDocument7 pagesGSM Based Vending Machinejcara4309100% (1)
- Relays TerminologyDocument1 pageRelays TerminologyJavid SalamovNo ratings yet
- Use of Multimeter Text EjerciciosDocument5 pagesUse of Multimeter Text EjerciciosWilliamNo ratings yet
- Raspberry Pi Internship PresentationDocument2 pagesRaspberry Pi Internship PresentationJitendra SonawaneNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Mxa710 Spec Sheet Letter enDocument2 pagesMxa710 Spec Sheet Letter enBobNo ratings yet
- Huawei Mobily WiMAX LTE (Samar 707649)Document78 pagesHuawei Mobily WiMAX LTE (Samar 707649)Nasir Iqbal100% (1)
- TDS 5054BDocument35 pagesTDS 5054BIlya KhaitNo ratings yet
- Avaya QuotationDocument4 pagesAvaya QuotationBITL TechnologyNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- SMS 4 Synthesis and DFTDocument40 pagesSMS 4 Synthesis and DFTanu100% (1)
- A5 Microelectronic Systems 5 Nyquist ADDocument25 pagesA5 Microelectronic Systems 5 Nyquist ADKoldodeRostovNo ratings yet
- Cmos Sequential CircuitsDocument33 pagesCmos Sequential Circuitslachuns123No ratings yet
- Duogen Product Bulletin PDFDocument2 pagesDuogen Product Bulletin PDFAnonymous VNu3ODGavNo ratings yet
- Micom 631 Technical ManualDocument532 pagesMicom 631 Technical ManualRuel De Villa100% (4)
- NV Jetson Agx Xavier Developer Kit User GuideDocument23 pagesNV Jetson Agx Xavier Developer Kit User GuideLuboš ŘehounekNo ratings yet
- Fundamentals of Mechatronics Short CourseDocument3 pagesFundamentals of Mechatronics Short CourseAamir Hasan KhanNo ratings yet
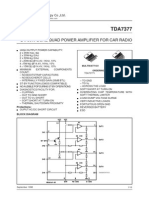
- 2 X 3 W Dual/Quad Power Amplifier For Car Radio: ProtectionsDocument10 pages2 X 3 W Dual/Quad Power Amplifier For Car Radio: ProtectionsJosé VidalNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)