You might also like
- Wen-Jing ZHANG, Li-Mao ZHANG, Xian-Guo WU and Yang LIUDocument6 pagesWen-Jing ZHANG, Li-Mao ZHANG, Xian-Guo WU and Yang LIUShafie ZubierNo ratings yet
- The Definite Integral of The Product Of: Linear FunctionsDocument7 pagesThe Definite Integral of The Product Of: Linear FunctionsCool KarthikNo ratings yet
- Applying Exterior Differential Calculus To Economics: A Presentation and Some New ResultsDocument30 pagesApplying Exterior Differential Calculus To Economics: A Presentation and Some New ResultsEbunu Octavia OlisehNo ratings yet
- Wavelets and Image Compression: A Guide to Multiresolution Analysis and Its ApplicationsDocument20 pagesWavelets and Image Compression: A Guide to Multiresolution Analysis and Its ApplicationsAshish PandeyNo ratings yet
- Andersson Djehiche - AMO 2011Document16 pagesAndersson Djehiche - AMO 2011artemischen0606No ratings yet
- Image Registration TechniquesDocument10 pagesImage Registration TechniquesSagar NerellaNo ratings yet
- Local Linear Conditional Cumulative Distribution Function With Mixing DataDocument19 pagesLocal Linear Conditional Cumulative Distribution Function With Mixing Dataالشمس اشرقتNo ratings yet
- Aos 2067Document23 pagesAos 2067Karen PessoaNo ratings yet
- Sobel Erosion Dilation ExamplesDocument37 pagesSobel Erosion Dilation ExampleszeeshanNo ratings yet
- Boolean Expression Based On Hypergraphs With AlgorithmDocument20 pagesBoolean Expression Based On Hypergraphs With AlgorithmScience DirectNo ratings yet
- Stochastic Processes HomeworkDocument8 pagesStochastic Processes Homeworkcfzgiuilf100% (1)
- Estimation of Time-Varying Par in STAT Models - Bertsimas Et - Al. (1999) - PUBDocument21 pagesEstimation of Time-Varying Par in STAT Models - Bertsimas Et - Al. (1999) - PUBWaisak Purnomo HNo ratings yet
- Fukusawa Martingale ExpansionsDocument21 pagesFukusawa Martingale ExpansionsRamesh KadambiNo ratings yet
- A numerical test verifies Heisenberg's uncertainty principle for a near-Gaussian wave packet in an infinite square wellDocument10 pagesA numerical test verifies Heisenberg's uncertainty principle for a near-Gaussian wave packet in an infinite square wellCuong TranNo ratings yet
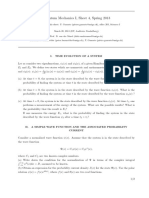
- Quantum Mechanics I, Sheet 4, Spring 2013: I. Time Evolution of A SystemDocument2 pagesQuantum Mechanics I, Sheet 4, Spring 2013: I. Time Evolution of A SystemB ToureNo ratings yet
- Quantum Particle Swarm Optimization For ElectromagneticsDocument27 pagesQuantum Particle Swarm Optimization For ElectromagneticsbababhoNo ratings yet
- Viscous Fluid FlowDocument48 pagesViscous Fluid FlowTrym Erik Nielsen100% (1)
- Inference of Generalized Pareto Parameters Under Joint Two Sample Progressive Type - II Censoring SchemeDocument12 pagesInference of Generalized Pareto Parameters Under Joint Two Sample Progressive Type - II Censoring Schemeehab aliNo ratings yet
- Improved Estimators of Tail Index and Extreme Quantiles Under Dependence SerialsDocument21 pagesImproved Estimators of Tail Index and Extreme Quantiles Under Dependence SerialsHugo BrangoNo ratings yet
- Risk and Duality in Multidimensions: Bart Lomiej B Laszczyszyn Karl SigmanDocument29 pagesRisk and Duality in Multidimensions: Bart Lomiej B Laszczyszyn Karl SigmanpostscriptNo ratings yet
- I Nternational Journal of Computational Engineering Research (Ijceronline - Com) Vol. 2 Issue. 7Document7 pagesI Nternational Journal of Computational Engineering Research (Ijceronline - Com) Vol. 2 Issue. 7International Journal of computational Engineering research (IJCER)No ratings yet
- Problem Set 1 "Working With The Solow Model"Document26 pagesProblem Set 1 "Working With The Solow Model"keyyongparkNo ratings yet
- Monte Carlo Techniques: 32.1. Sampling The Uniform DistributionDocument7 pagesMonte Carlo Techniques: 32.1. Sampling The Uniform DistributionHuu PhuocNo ratings yet
- Module01 PDFDocument3 pagesModule01 PDFEmman Joshua BustoNo ratings yet
- Mean Reversion Versus Random Walk in Oil and Natural Gas PricesDocument10 pagesMean Reversion Versus Random Walk in Oil and Natural Gas PricesPedro GerrardNo ratings yet
- A Two Parameter Distribution Obtained byDocument15 pagesA Two Parameter Distribution Obtained byc122003No ratings yet
- B671-672 Supplemental Notes 2 Hypergeometric, Binomial, Poisson and Multinomial Random Variables and Borel SetsDocument13 pagesB671-672 Supplemental Notes 2 Hypergeometric, Binomial, Poisson and Multinomial Random Variables and Borel SetsDesmond SeahNo ratings yet
- Linear Convolution Using GUIDocument19 pagesLinear Convolution Using GUIRamya R Mallya0% (1)
- Economics 202 Pset 1Document4 pagesEconomics 202 Pset 1Richard PillNo ratings yet
- Manuscript SigmaDocument10 pagesManuscript SigmaYiğit ErpakNo ratings yet
- On The Glivenko-Cantelli Problem in Stochastic Programming: Mixed-Integer Linear RecourseDocument12 pagesOn The Glivenko-Cantelli Problem in Stochastic Programming: Mixed-Integer Linear RecourseNathalie Jamett GuillierNo ratings yet
- Lyapunov Stability Analysis of Mass-Spring System with FrictionDocument27 pagesLyapunov Stability Analysis of Mass-Spring System with FrictionGrecia GarciaNo ratings yet
- 188-Article Text-852-3-10-20221111Document13 pages188-Article Text-852-3-10-20221111YC ChanNo ratings yet
- Wang 2012Document15 pagesWang 2012Wang RickyNo ratings yet
- L23 - Postulates of QMDocument24 pagesL23 - Postulates of QMdomagix470No ratings yet
- 1 s2.0 S0304414918301418 MainDocument44 pages1 s2.0 S0304414918301418 MainMahendra PerdanaNo ratings yet
- Technical Note On The Estimation of Forward and Zero Coupon Yield Curves As Applied To Italian Euromarket RatesDocument3 pagesTechnical Note On The Estimation of Forward and Zero Coupon Yield Curves As Applied To Italian Euromarket RatesPedro FernandezNo ratings yet
- ACFrOgCMX8s4TNMIypTS-sGajrvoRmTIGGs7j018QP_hSLYDnoi79LD8gsU-WUsRovrl-BxT33_A18ETvpqYqpTcbOX-6FWuwiVdq2at6Ztpnkws_gxcfLPRfdXO58N9cv8wZaQX6pLbFX8WazNrDocument19 pagesACFrOgCMX8s4TNMIypTS-sGajrvoRmTIGGs7j018QP_hSLYDnoi79LD8gsU-WUsRovrl-BxT33_A18ETvpqYqpTcbOX-6FWuwiVdq2at6Ztpnkws_gxcfLPRfdXO58N9cv8wZaQX6pLbFX8WazNrIRINA ALEXANDRA GeorgescuNo ratings yet
- Metrology Ad Measuremet Systems: Index 330930, ISS 0860-8229 WWW - Metrology.pg - Gda.plDocument12 pagesMetrology Ad Measuremet Systems: Index 330930, ISS 0860-8229 WWW - Metrology.pg - Gda.plSiddharthNo ratings yet
- C P - PH 354: Omputational HysicsDocument14 pagesC P - PH 354: Omputational HysicsAthira GopalNo ratings yet
- Aliyu JamesDocument9 pagesAliyu JamesMICHAEL BRANDON CHANDRANo ratings yet
- Bellman, Lee - Functional Equations in Dynamic ProgrammingDocument18 pagesBellman, Lee - Functional Equations in Dynamic ProgrammingYermakov Vadim IvanovichNo ratings yet
- Report Project Linear Algebra - Group 7 - Cc11Document20 pagesReport Project Linear Algebra - Group 7 - Cc11Trương Cao ThiệnNo ratings yet
- Optimal Control of Serial Production SystemsDocument42 pagesOptimal Control of Serial Production SystemsDidier HuntjensNo ratings yet
- Closed Form Solutions To Generalized Logistic-Type Nonautonomous SystemsDocument12 pagesClosed Form Solutions To Generalized Logistic-Type Nonautonomous SystemsLuis Alberto FuentesNo ratings yet
- Solution To Problem 87-6 : The Entropy of A Poisson DistributionDocument5 pagesSolution To Problem 87-6 : The Entropy of A Poisson DistributionSameeraBharadwajaHNo ratings yet
- Nonlinear Dynamics in Coevolution of Economic and Environmental SystemsDocument9 pagesNonlinear Dynamics in Coevolution of Economic and Environmental SystemsvenkatgramNo ratings yet
- 1 The SCHR Odinger Equation: Potential StepDocument7 pages1 The SCHR Odinger Equation: Potential StepHalloMannNo ratings yet
- Maths Notes ExplainedDocument40 pagesMaths Notes ExplainedRachel FangNo ratings yet
- Solution Techniques for Periodic Control Problems in Production PlanningDocument26 pagesSolution Techniques for Periodic Control Problems in Production PlanningxatataNo ratings yet
- SGFilter - A Stand-Alone Implementation of The Savitzky-Golay Smoothing FilterDocument42 pagesSGFilter - A Stand-Alone Implementation of The Savitzky-Golay Smoothing FilterFredrik JonssonNo ratings yet
- Liz SweetDocument27 pagesLiz SweetssfofoNo ratings yet
- Mean-Variance Portfolio Optimal Problem Under Concave Transaction CostDocument12 pagesMean-Variance Portfolio Optimal Problem Under Concave Transaction CostKarol SevillaNo ratings yet
- Runge Kutta AlgorithmDocument3 pagesRunge Kutta AlgorithmRodrigo AbdoNo ratings yet
- 2021 Book Tach Part7 PaperportfolioDocument8 pages2021 Book Tach Part7 PaperportfolioKhang Trương TuấnNo ratings yet
- Micro-Chaos in Digital Control: Summary. in This Paper We Analyze A Model For The Effect of Digital Control On OneDocument34 pagesMicro-Chaos in Digital Control: Summary. in This Paper We Analyze A Model For The Effect of Digital Control On OneGeorge HallerNo ratings yet
- Particle Filter TutorialDocument8 pagesParticle Filter TutorialTanmay NathNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- ?vfvcdtyvz - F - XV - Z - Uvcdtyczwev - Cvzyvuvdd73: Cva'Ce?'"%Document14 pages?vfvcdtyvz - F - XV - Z - Uvcdtyczwev - Cvzyvuvdd73: Cva'Ce?'"%postscriptNo ratings yet
- Wenke Discex00Document15 pagesWenke Discex00postscriptNo ratings yet
- PatentsDocument9 pagesPatentspostscript100% (1)
- Scalable, Tax Evasion-Free Anonymous InvestingDocument8 pagesScalable, Tax Evasion-Free Anonymous InvestingpostscriptNo ratings yet
- It2 Fact SheetDocument2 pagesIt2 Fact SheetpostscriptNo ratings yet
- TestsecDocument5 pagesTestsecpostscriptNo ratings yet
- EdcDocument25 pagesEdcpostscriptNo ratings yet
- PRPR 0118Document6 pagesPRPR 0118postscriptNo ratings yet
- Solution To Mock Midterm 2: 1 Allais-Baumol-Tobin ModelDocument4 pagesSolution To Mock Midterm 2: 1 Allais-Baumol-Tobin ModelpostscriptNo ratings yet
- Is Lumpy Investment Relevant For The Business Cycle?Document31 pagesIs Lumpy Investment Relevant For The Business Cycle?postscriptNo ratings yet
- Approximating Prices of Bonds With Log - Normal Interest RateDocument17 pagesApproximating Prices of Bonds With Log - Normal Interest RatepostscriptNo ratings yet
- Encouraging Cooperative Solution of Mathematics ProblemsDocument9 pagesEncouraging Cooperative Solution of Mathematics ProblemspostscriptNo ratings yet
- C M S 2004 International Press Vol. 2, No. 1, Pp. 137-144: Omm. Ath. CIDocument8 pagesC M S 2004 International Press Vol. 2, No. 1, Pp. 137-144: Omm. Ath. CIpostscriptNo ratings yet
- 20 AmortDocument7 pages20 AmortpostscriptNo ratings yet
- Improving Dense Packings of Equal Disks in A Square: N N M M N NDocument9 pagesImproving Dense Packings of Equal Disks in A Square: N N M M N NpostscriptNo ratings yet
- PaperDocument4 pagesPaperpostscriptNo ratings yet
- Lec 6Document6 pagesLec 6postscriptNo ratings yet
- SnackenDocument9 pagesSnackenpostscriptNo ratings yet
- HagjoycombesDocument12 pagesHagjoycombespostscriptNo ratings yet
- Hagjoy 10 CMPDocument31 pagesHagjoy 10 CMPpostscriptNo ratings yet
- ZengerDocument38 pagesZengerpostscriptNo ratings yet
- CVDocument12 pagesCVpostscriptNo ratings yet
- LM 02Document12 pagesLM 02postscriptNo ratings yet
- Chip To Kapton Bonding Procedur1Document4 pagesChip To Kapton Bonding Procedur1postscriptNo ratings yet
- NM Ad'S Statement of Disclosure: Mrose - Iesg@dbc - Mtview.ca - UsDocument13 pagesNM Ad'S Statement of Disclosure: Mrose - Iesg@dbc - Mtview.ca - UspostscriptNo ratings yet
- Srikant SlidesDocument27 pagesSrikant SlidespostscriptNo ratings yet
- Gaining Confidence in Mathematics: Instructional Technology For GirlsDocument8 pagesGaining Confidence in Mathematics: Instructional Technology For GirlspostscriptNo ratings yet
- BrnoDocument35 pagesBrnopostscriptNo ratings yet
- Corporate Hedging: What, Why and How?Document48 pagesCorporate Hedging: What, Why and How?postscriptNo ratings yet
- Net NeutralityDocument19 pagesNet Neutralitypostscript100% (1)
- 1.0sg Equations and Inequalities - Study GuideDocument1 page1.0sg Equations and Inequalities - Study Guiderad58No ratings yet
- Class Record (Science 9) S.Y. 2020-2021Document8 pagesClass Record (Science 9) S.Y. 2020-2021Wilmar EspinosaNo ratings yet
- 2009 - Mazars Insight Ifrs 5 enDocument36 pages2009 - Mazars Insight Ifrs 5 enSahar FekihNo ratings yet
- Bachelor Thesis MaritimeDocument43 pagesBachelor Thesis MaritimeMiriam PedersenNo ratings yet
- PHY3201Document3 pagesPHY3201Ting Woei LuenNo ratings yet
- Kawai MP7 Owner's ManualDocument148 pagesKawai MP7 Owner's ManualMiloNo ratings yet
- Chapter 21 I Variations ENHANCEDocument21 pagesChapter 21 I Variations ENHANCENorazah AhmadNo ratings yet
- Buwis ButilDocument2 pagesBuwis ButilHelbert Agluba PaatNo ratings yet
- Generator Honda EP2500CX1Document50 pagesGenerator Honda EP2500CX1Syamsul Bahry HarahapNo ratings yet
- The Law of DemandDocument13 pagesThe Law of DemandAngelique MancillaNo ratings yet
- Between Empire and GlobalizationDocument5 pagesBetween Empire and Globalizationazert yuiopNo ratings yet
- Respiratory Protection RequirementsDocument35 pagesRespiratory Protection RequirementsNehemiah Cervantes100% (3)
- Quantum Dot PDFDocument22 pagesQuantum Dot PDFALI ASHRAFNo ratings yet
- Flood Risk AssessmentDocument167 pagesFlood Risk AssessmentElenne Mendoza Mortel EvoraNo ratings yet
- Glover U Business Plan 2022 DigitalDocument25 pagesGlover U Business Plan 2022 DigitalJustin CarruthNo ratings yet
- Ali, B.H., Al Wabel, N., Blunden, G., 2005Document8 pagesAli, B.H., Al Wabel, N., Blunden, G., 2005Herzan MarjawanNo ratings yet
- Developmental Screening Using The: Philippine Early Childhood Development ChecklistDocument30 pagesDevelopmental Screening Using The: Philippine Early Childhood Development ChecklistGene BonBonNo ratings yet
- American Cows in Antarctica R. ByrdDocument28 pagesAmerican Cows in Antarctica R. ByrdBlaze CNo ratings yet
- 40 Business Book SummariesDocument196 pages40 Business Book SummariesAnshuman SrivastavaNo ratings yet
- Channel Emotions into FlowDocument2 pagesChannel Emotions into Flowmaxalves77No ratings yet
- 1 HeterogenitasDocument46 pages1 HeterogenitasRani JuliariniNo ratings yet
- You Said It's Called Supreme Mathematics RightDocument2 pagesYou Said It's Called Supreme Mathematics RightAuMatu89% (9)
- Its Raining Idioms A Figurative Language ActivityDocument11 pagesIts Raining Idioms A Figurative Language ActivityTyrone MoogNo ratings yet
- House (Sometimes Known As House, M.D.) Is An American TelevisionDocument17 pagesHouse (Sometimes Known As House, M.D.) Is An American Televisionpichi94No ratings yet
- Philosophy of Online Facilitation and LearningDocument5 pagesPhilosophy of Online Facilitation and LearningStefanieNo ratings yet
- Overcoming ChallengesDocument28 pagesOvercoming ChallengesDeutsche Mark CuynoNo ratings yet
- Saht 740 GCPDocument112 pagesSaht 740 GCPJulio SurqueNo ratings yet
- Deviz 12 KW Cu Invertor de 15 KWDocument2 pagesDeviz 12 KW Cu Invertor de 15 KWcontscribdNo ratings yet
- Knowing God Intimately Joyce Meyer Christiandiet - Com .NGDocument343 pagesKnowing God Intimately Joyce Meyer Christiandiet - Com .NGadriana mariaNo ratings yet