You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- An137 - Lithium Ion Battery Charger Using c8051f300Document36 pagesAn137 - Lithium Ion Battery Charger Using c8051f300oakkar7No ratings yet
- 00001825A USB Power DesignDocument20 pages00001825A USB Power Designoakkar7No ratings yet
- Adaptive Echo Cancellation AnalysisDocument98 pagesAdaptive Echo Cancellation Analysisoakkar7No ratings yet
- 8686 Faceplate DatasheetDocument2 pages8686 Faceplate Datasheetoakkar7No ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
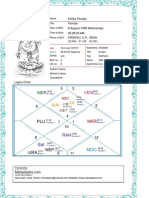
- Kritika Pandey (Kaushambi)Document15 pagesKritika Pandey (Kaushambi)nishink9No ratings yet
- Understanding Work Conditioning and Work Hardening Programs For A Successful RTW 3 13 2014 NovaCare PDFDocument37 pagesUnderstanding Work Conditioning and Work Hardening Programs For A Successful RTW 3 13 2014 NovaCare PDFSitiSarah0% (1)
- SCIENCE and EDUCATION A NEW DIMENSION HUMANITIES and SOCIAL SCIENCE Issue 223Document93 pagesSCIENCE and EDUCATION A NEW DIMENSION HUMANITIES and SOCIAL SCIENCE Issue 223seanewdimNo ratings yet
- Quantification of Organic Acids by HPLCDocument5 pagesQuantification of Organic Acids by HPLCLee HaronNo ratings yet
- Answers To Case Application Ch1-8Document13 pagesAnswers To Case Application Ch1-8553601750% (2)
- C#Document3 pagesC#Dung RieuNo ratings yet
- Human BehaviorDocument14 pagesHuman BehaviorJay Ann AguilarNo ratings yet
- External Conditions Imposed On The GroupDocument8 pagesExternal Conditions Imposed On The GroupPrakriti GoelNo ratings yet
- OP5142 User Manual-ADocument40 pagesOP5142 User Manual-AJignesh MakwanaNo ratings yet
- Applying COCOMO II - A Case StudyDocument57 pagesApplying COCOMO II - A Case StudyMeghraj SapkotaNo ratings yet
- Introduction To Marketing ManagementDocument24 pagesIntroduction To Marketing ManagementDrRuchi GargNo ratings yet
- Mom MF-1Document79 pagesMom MF-1AnbuNo ratings yet
- What Is SAP Reconciliation Account - ERProofDocument10 pagesWhat Is SAP Reconciliation Account - ERProofShailesh SuranaNo ratings yet
- Mock 1 Practice PaperDocument27 pagesMock 1 Practice PaperSupriti SarkerNo ratings yet
- Final Introduction To Community Based Management PowerpointDocument36 pagesFinal Introduction To Community Based Management PowerpointJazmine AlgerNo ratings yet
- 3412 Timing CalibrationDocument4 pages3412 Timing CalibrationHrvoje Škarica100% (3)
- TPS - Quick AssessmentDocument2 pagesTPS - Quick AssessmentcssIllinois100% (1)
- Action Research 2019Document26 pagesAction Research 2019Gerlynne SegadorNo ratings yet
- Space Lab 1Document4 pagesSpace Lab 1kael kwanNo ratings yet
- CEBM Levels of Evidence Introduction 2.1Document3 pagesCEBM Levels of Evidence Introduction 2.1Anida SaNiia BecKzNo ratings yet
- Unit 18 Part IDocument23 pagesUnit 18 Part IJorge FrancoNo ratings yet
- Appsc Vro Vra Syllbi51234Document2 pagesAppsc Vro Vra Syllbi51234Mani MalliNo ratings yet
- MedigpsDocument8 pagesMedigpsAlex HillNo ratings yet
- 2046 Def Scriptie Dennis Wessing PDFDocument170 pages2046 Def Scriptie Dennis Wessing PDFRK CISANo ratings yet
- Nlaa Siam.2010Document1 pageNlaa Siam.2010YesicaAquinoNo ratings yet
- Walpole Ch01Document31 pagesWalpole Ch01Fadi MahfouzNo ratings yet
- Maximum Remaining - CodeChefDocument3 pagesMaximum Remaining - CodeChefShubhi SinghNo ratings yet
- The ChE As Sherlock Holmes Investigating Process IncidentsDocument7 pagesThe ChE As Sherlock Holmes Investigating Process IncidentsCamilo MoraNo ratings yet
- Cover Page and CertificateDocument34 pagesCover Page and CertificateSello HlabeliNo ratings yet
- PF Chang's Health Inspection 6-21-19Document2 pagesPF Chang's Health Inspection 6-21-19Jimmy BentleyNo ratings yet