You might also like
- Fitness Based Mutation in Artificial Bee Colony Algorithm: Sanjay Singh Vibhakar Pathak, PH.DDocument5 pagesFitness Based Mutation in Artificial Bee Colony Algorithm: Sanjay Singh Vibhakar Pathak, PH.DNurul Fahrizatul RohmahNo ratings yet
- Research ArticleDocument15 pagesResearch Articleikram boucettaNo ratings yet
- Chun Feng2014Document9 pagesChun Feng2014Chakib BenmhamedNo ratings yet
- A Hybrid Bat Algorithm With Natural Inspired Algorithms For Continuous Optimization ProblemDocument8 pagesA Hybrid Bat Algorithm With Natural Inspired Algorithms For Continuous Optimization ProblemDebapriya MitraNo ratings yet
- An Adaptive Particle Swarm Optimization Algorithm Based On Cat MapDocument8 pagesAn Adaptive Particle Swarm Optimization Algorithm Based On Cat MapmenguemengueNo ratings yet
- Handling Constraints in Particle Swarm Optimization Using A Small Population SizeDocument11 pagesHandling Constraints in Particle Swarm Optimization Using A Small Population Sizedebasishmee5808No ratings yet
- BBA: A Binary Bat Algorithm For Feature Selection: Abstract-Feature Selection Aims To Find The Most ImportantDocument7 pagesBBA: A Binary Bat Algorithm For Feature Selection: Abstract-Feature Selection Aims To Find The Most ImportantfalalemNo ratings yet
- Karaboga 2014Document12 pagesKaraboga 2014m_hanineNo ratings yet
- A Hybrid Algorithm Based On Cuckoo Search and Differential Evolution For Numerical OptimizationDocument8 pagesA Hybrid Algorithm Based On Cuckoo Search and Differential Evolution For Numerical OptimizationrasminojNo ratings yet
- Application of PSO, Artificial Bee Colony and Bacterial Foraging Optimization Algorithms To Economic Load Dispatch: An AnalysisDocument4 pagesApplication of PSO, Artificial Bee Colony and Bacterial Foraging Optimization Algorithms To Economic Load Dispatch: An AnalysispragatinareshNo ratings yet
- JCST Paper PDFDocument17 pagesJCST Paper PDFRobin CookNo ratings yet
- Design of Linear and Circular Antenna Arrays Using Cuckoo Optimization AlgorithmDocument11 pagesDesign of Linear and Circular Antenna Arrays Using Cuckoo Optimization AlgorithmMatthew AlexanderNo ratings yet
- Nature-Inspired Cuckoo Search Algorithm For Side Lobe Suppression in A Symmetric Linear Antenna ArrayDocument10 pagesNature-Inspired Cuckoo Search Algorithm For Side Lobe Suppression in A Symmetric Linear Antenna ArrayJagabar SathikNo ratings yet
- HoneyDocument5 pagesHoneyJ Arun AunNo ratings yet
- 13-12-22 - (Inderscience) Comparison of Bald Eagle Search (BES) Algorithm Paper - RebuttalDocument14 pages13-12-22 - (Inderscience) Comparison of Bald Eagle Search (BES) Algorithm Paper - RebuttalGanapati Girish KamatNo ratings yet
- Hybrid Ant Colony-Genetic Algorithm (GAAPI) For Global Continuous OptimizationDocument12 pagesHybrid Ant Colony-Genetic Algorithm (GAAPI) For Global Continuous OptimizationRaghul RamasamyNo ratings yet
- A New Design Method Based On Artificial Bee Colony Algorithm For Digital IIR FiltersDocument21 pagesA New Design Method Based On Artificial Bee Colony Algorithm For Digital IIR FiltersIlham LuthfiNo ratings yet
- Evaluation The Efficiency of Artificial Bee Colony and The Firefly Algorithm in Solving The Continuous Optimization ProblemDocument13 pagesEvaluation The Efficiency of Artificial Bee Colony and The Firefly Algorithm in Solving The Continuous Optimization ProblemAnonymous lVQ83F8mCNo ratings yet
- Analysis of Cuckoo Search Efficiency: Carlos Eduardo M. Barbosa Germano C. VasconcelosDocument8 pagesAnalysis of Cuckoo Search Efficiency: Carlos Eduardo M. Barbosa Germano C. VasconcelosDavid StuartNo ratings yet
- Drop Wave FunctionDocument8 pagesDrop Wave Functionmelo_gemelo3348No ratings yet
- An Analysis of The Search Mechanisms of The Bees AlgorithmDocument38 pagesAn Analysis of The Search Mechanisms of The Bees Algorithmalmanea.lamiaNo ratings yet
- Applying Data Clustering Feature To Speed Up Ant CDocument8 pagesApplying Data Clustering Feature To Speed Up Ant CUsman AshrafNo ratings yet
- TSWJ2014 824196Document10 pagesTSWJ2014 824196alejandragonzalezrozo1No ratings yet
- A Hybrid Artificial Bee Colony Algorithmic Approach For Classification Using Neural NetworksDocument24 pagesA Hybrid Artificial Bee Colony Algorithmic Approach For Classification Using Neural NetworksVishnu DeepakNo ratings yet
- One ColumnDocument25 pagesOne ColumnVENKATESH KUMAR CNo ratings yet
- A Cellular Genetic Algorithm For Multiobjective OptimizationDocument12 pagesA Cellular Genetic Algorithm For Multiobjective Optimizationrogeriocosta37No ratings yet
- 465-Full Paper (With Author Names and Affiliations, Etc.) - 3431-1!10!20211003Document12 pages465-Full Paper (With Author Names and Affiliations, Etc.) - 3431-1!10!20211003adlinefreedaNo ratings yet
- A Modified Particle Swarm Optimization For Optimal Power FlowDocument7 pagesA Modified Particle Swarm Optimization For Optimal Power Flowsatti849No ratings yet
- BBA A Binary Bat Algorithm For Feature S20160528-5925-Tvv15j-With-Cover-Page-V2Document8 pagesBBA A Binary Bat Algorithm For Feature S20160528-5925-Tvv15j-With-Cover-Page-V2Harsh SonawaneNo ratings yet
- Optimal Scheduling of Generation Using ANFIS: T Sobhanbabu, DR T.Gowri Manohar, P.Dinakar Prasad ReddyDocument5 pagesOptimal Scheduling of Generation Using ANFIS: T Sobhanbabu, DR T.Gowri Manohar, P.Dinakar Prasad ReddyMir JamalNo ratings yet
- Csit42217 PDFDocument11 pagesCsit42217 PDFmkrishnadNo ratings yet
- Applied Mathematics and ComputationDocument19 pagesApplied Mathematics and ComputationchandreshgovindNo ratings yet
- Afshar 2008Document23 pagesAfshar 2008بلقاسم جلاليNo ratings yet
- A Hybrid Approach For Design of Stable Adaptive Fuzzy Controllers Employing Lyapunov Theory and Particle Swarm OptimizationDocument14 pagesA Hybrid Approach For Design of Stable Adaptive Fuzzy Controllers Employing Lyapunov Theory and Particle Swarm OptimizationGhantaSingh007No ratings yet
- Speech Signal Enhancement Algorithams Implementation Using Neural Netwoks and Fuzzy Logic PrinciplesDocument7 pagesSpeech Signal Enhancement Algorithams Implementation Using Neural Netwoks and Fuzzy Logic PrinciplesPidikiti Surendra BabuNo ratings yet
- Final ManuscriptDocument15 pagesFinal ManuscriptGanapati Girish KamatNo ratings yet
- Research Article: Parallel Swarms Oriented Particle Swarm OptimizationDocument8 pagesResearch Article: Parallel Swarms Oriented Particle Swarm Optimizationmarcio pivelloNo ratings yet
- DocHighly Optimized Energy Saving Protocol For Flying Ad-Hoc NetworkDocument15 pagesDocHighly Optimized Energy Saving Protocol For Flying Ad-Hoc NetworkIJRASETPublicationsNo ratings yet
- Spiral Array Design With Particle Swarm Optimization: Rilin Chen, Pengxiao Teng, Yichun YangDocument4 pagesSpiral Array Design With Particle Swarm Optimization: Rilin Chen, Pengxiao Teng, Yichun YangVinay KothapallyNo ratings yet
- An Enhanced Hybridized Artificial Bee Colony Algorithm For Optimization ProblemsDocument8 pagesAn Enhanced Hybridized Artificial Bee Colony Algorithm For Optimization ProblemsIAES IJAINo ratings yet
- Journal of Electromagnetic Analysis and ApplicationsDocument7 pagesJournal of Electromagnetic Analysis and Applicationskrishnagaurav90No ratings yet
- Bat Algorithm in Discrete Optimization: A Review of Recent ApplicationsDocument10 pagesBat Algorithm in Discrete Optimization: A Review of Recent ApplicationsHadjer mNo ratings yet
- Icai08 NN MengDocument7 pagesIcai08 NN MengRafael CruzNo ratings yet
- Optimizing The Sensor Deployment Strategy For Large-Scale Internet of Things (IoT) Using Artificial Bee ColonyDocument6 pagesOptimizing The Sensor Deployment Strategy For Large-Scale Internet of Things (IoT) Using Artificial Bee ColonyHemanth S.NNo ratings yet
- Journal of Computer Applications - WWW - Jcaksrce.org - Volume 4 Issue 2Document5 pagesJournal of Computer Applications - WWW - Jcaksrce.org - Volume 4 Issue 2Journal of Computer ApplicationsNo ratings yet
- Modified Bat Algorithm With Cauchy Mutation and Elite Opposition-Based LearningDocument6 pagesModified Bat Algorithm With Cauchy Mutation and Elite Opposition-Based LearningNayan BhattacharyaNo ratings yet
- Genetic Algorithms: 4.1 Quick OverviewDocument12 pagesGenetic Algorithms: 4.1 Quick Overviewseunnuga93No ratings yet
- Accepted Manuscript: 10.1016/j.ins.2018.02.025Document24 pagesAccepted Manuscript: 10.1016/j.ins.2018.02.025Jawad ul HassanNo ratings yet
- My PSODocument14 pagesMy PSOjensi_ramakrishnanNo ratings yet
- Block Matching Algorithm For Motion Estimation Based On Artificial Bee Colony (ABC)Document22 pagesBlock Matching Algorithm For Motion Estimation Based On Artificial Bee Colony (ABC)Nurul Fahrizatul RohmahNo ratings yet
- Abc PaperDocument6 pagesAbc PaperVandana RathoreNo ratings yet
- DankienDocument18 pagesDankiendoantranuyennhiNo ratings yet
- 5W1HDocument2 pages5W1HMarcelo Geraldo TeixeiraNo ratings yet
- Bee ColonyDocument7 pagesBee ColonyLupu CiprianNo ratings yet
- Association Rule Mining Using Self Adaptive Particle Swarm OptimizationDocument5 pagesAssociation Rule Mining Using Self Adaptive Particle Swarm OptimizationAnonymous TxPyX8cNo ratings yet
- TLSAPSODocument22 pagesTLSAPSOAndy SyaputraNo ratings yet
- Hybrid Differential Evolution and Enhanced Particle Swarm Optimisation Technique For Design of Reconfigurable Phased Antenna ArraysDocument8 pagesHybrid Differential Evolution and Enhanced Particle Swarm Optimisation Technique For Design of Reconfigurable Phased Antenna ArraysYogesh SharmaNo ratings yet
- On The Optimum Scenarios For Single Row Equidistant Facility Layout ProblemDocument14 pagesOn The Optimum Scenarios For Single Row Equidistant Facility Layout ProblemSHROUQ GAMALNo ratings yet
- KP For RamDocument23 pagesKP For RamMonu NarwarNo ratings yet
- Strategic Cost AnalysisDocument24 pagesStrategic Cost AnalysisBusiness Expert Press100% (10)
- (English (Auto-Generated) ) Intraday Trading On Nifty (2nd September, 2021) 8 Lakhs Profit Shreyas Bandi Trade Ideas Live (DownSub - Com)Document41 pages(English (Auto-Generated) ) Intraday Trading On Nifty (2nd September, 2021) 8 Lakhs Profit Shreyas Bandi Trade Ideas Live (DownSub - Com)YaaroNo ratings yet
- Anaximenes of MiletusDocument4 pagesAnaximenes of MiletusRosel Gonzalo-AquinoNo ratings yet
- Chapter 15 - Leukocyte Migration and Inflammation - The IS Relies Upon The Continual Circulation of Leukocytes Through The BodyDocument12 pagesChapter 15 - Leukocyte Migration and Inflammation - The IS Relies Upon The Continual Circulation of Leukocytes Through The BodyEmad ManniNo ratings yet
- Mecanica MD - AZG-UDocument29 pagesMecanica MD - AZG-UStefanoViganóNo ratings yet
- Wearable BiosensorsDocument16 pagesWearable BiosensorsShreehari Haridasan100% (1)
- 2017 Reviving Tribal Tattoo TraditionsDocument3 pages2017 Reviving Tribal Tattoo Traditions高權梁No ratings yet
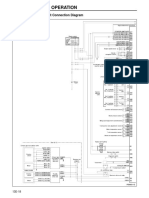
- Structure and Operation: 3. Electronic Control Unit Connection DiagramDocument16 pagesStructure and Operation: 3. Electronic Control Unit Connection DiagramAung Hlaing Min MyanmarNo ratings yet
- Yanmar Graafmachines SV17 PDFDocument10 pagesYanmar Graafmachines SV17 PDFAleksandar PetkovicNo ratings yet
- Lubricants - McMaster-CarrDocument8 pagesLubricants - McMaster-CarrjeanyoperNo ratings yet
- Book - Sefer Yetzira - Book of Creation - Free KabbalahDocument3 pagesBook - Sefer Yetzira - Book of Creation - Free KabbalahJoshuaNo ratings yet
- 12 ĀnurũpyenaDocument7 pages12 ĀnurũpyenashuklahouseNo ratings yet
- Is There Any Way To Download The Whole Package of Asphalt 8 Airborne So That I Can Install It On Any Android Device Without An Internet Connection - QuoraDocument4 pagesIs There Any Way To Download The Whole Package of Asphalt 8 Airborne So That I Can Install It On Any Android Device Without An Internet Connection - QuoraMounir2105No ratings yet
- Secondary GeographyDocument127 pagesSecondary GeographyAbcdNo ratings yet
- 6000 Most Common Korean Words - For All TOPIK Levels PDFDocument232 pages6000 Most Common Korean Words - For All TOPIK Levels PDFZac67% (3)
- Accommodating Expansion of Brickwork: Technical Notes 18ADocument13 pagesAccommodating Expansion of Brickwork: Technical Notes 18AWissam AlameddineNo ratings yet
- Concession Project List Excel 02-Aug-2019Document15 pagesConcession Project List Excel 02-Aug-2019Vishal BansalNo ratings yet
- The First-Fourth Books of The HitopadésaDocument116 pagesThe First-Fourth Books of The HitopadésaMiguel RosaNo ratings yet
- Critique of Violence - Walter BenjaminDocument14 pagesCritique of Violence - Walter BenjaminKazım AteşNo ratings yet
- H&M Case Study AssignmentDocument7 pagesH&M Case Study AssignmentwqvyakNo ratings yet
- An Introduction To EFTDocument24 pagesAn Introduction To EFTkunjammuNo ratings yet
- St. Louis College of Bulanao: Title/Topic Technical English I Introduction To Police Report WritingDocument41 pagesSt. Louis College of Bulanao: Title/Topic Technical English I Introduction To Police Report WritingNovelyn LumboyNo ratings yet
- Alignment Technique - The Steam TurbineDocument2 pagesAlignment Technique - The Steam TurbineRajeswar KulanjiNo ratings yet
- MLAB 3 - BoilerDocument3 pagesMLAB 3 - BoilerReden LopezNo ratings yet
- ASME Geometric Dimension Ing and Tolerance Professional CertificationDocument20 pagesASME Geometric Dimension Ing and Tolerance Professional CertificationPaul Anthony Red60% (5)
- 141 ISACA NACACS Auditing IT Projects Audit ProgramDocument86 pages141 ISACA NACACS Auditing IT Projects Audit Programkautaliya100% (6)
- Module 14-Area ComputationsDocument5 pagesModule 14-Area ComputationsGerovic Parinas50% (2)
- SOL-Logarithm, Surds and IndicesDocument12 pagesSOL-Logarithm, Surds and Indicesdevli falduNo ratings yet
- Union Metal SemiconductorDocument4 pagesUnion Metal SemiconductorskinhugoNo ratings yet