You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Trajectory Tracking of AR DroneDocument10 pagesTrajectory Tracking of AR DroneIvan Alexis Manning LuckNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Pictrainer2 40Document1 pagePictrainer2 40Christopper Alvarado SolanoNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 74LS74 DatasheetDocument6 pages74LS74 DatasheetBram Ba BambNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Manual Pic18f4550 MicrochipDocument438 pagesManual Pic18f4550 MicrochipcacasecacacasecaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Intro to Communication Systems Ch 1 Multiple ChoiceDocument160 pagesIntro to Communication Systems Ch 1 Multiple Choicecathy100% (2)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Verb Tenses ExercisesDocument10 pagesVerb Tenses ExercisesIsabela PugaNo ratings yet
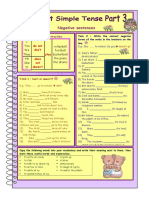
- Present Simple Tense Negative Sentences 3 Pages 6 Different Tasks With Key With Vocabulary CornerDocument5 pagesPresent Simple Tense Negative Sentences 3 Pages 6 Different Tasks With Key With Vocabulary CornerDina Ines Estupiñan SolanoNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Neuwirth - Musical Temperaments (Vienna, 1997) PDFDocument75 pagesNeuwirth - Musical Temperaments (Vienna, 1997) PDFhsimond9052No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Ecee 513 - Module 5Document18 pagesEcee 513 - Module 5Jonnel PabicoNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- DRF1301 1000V 15A 30MHz MOSFET Push-Pull Hybrid DriverDocument4 pagesDRF1301 1000V 15A 30MHz MOSFET Push-Pull Hybrid DriverAddy JayaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Friday Night Lights 5x13 - AlwaysDocument56 pagesFriday Night Lights 5x13 - Alwaysfil24No ratings yet
- Read The Following Passages and Answer The Questions Given BelowDocument6 pagesRead The Following Passages and Answer The Questions Given Belowmagesh kannanNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- HCD DP700Document88 pagesHCD DP700César MurilloNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Fashion OrientationDocument17 pagesFashion OrientationSam BanerjeeNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Stagnoli - Hercules 240v Control BoardDocument8 pagesStagnoli - Hercules 240v Control BoardMohamed TatasNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- BIHAR-Staff-Selection-Commission-Lists-Candidates-Rejected-Due-to-Challan-MismatchDocument31 pagesBIHAR-Staff-Selection-Commission-Lists-Candidates-Rejected-Due-to-Challan-Mismatchkumarrahul1234No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- AMOR AMOR Saxophone - TénorDocument1 pageAMOR AMOR Saxophone - TénorAnonymous njY7RyD97No ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Keyboard PhysicsDocument10 pagesKeyboard PhysicsJemuelVillonNo ratings yet
- Dynamic Loudspeaker Principle in Under 40Document46 pagesDynamic Loudspeaker Principle in Under 40rameelapradeothNo ratings yet
- CXA60 Issue 1.2 (April 2020)Document57 pagesCXA60 Issue 1.2 (April 2020)marceloNo ratings yet
- About Lami-Lami-WPS OfficeDocument3 pagesAbout Lami-Lami-WPS OfficeMuzically InspiredNo ratings yet
- "Mulu Ratama Hari Magata" National StatementDocument42 pages"Mulu Ratama Hari Magata" National StatementAda Derana100% (1)
- Pride and Prejudice For 1.1Document132 pagesPride and Prejudice For 1.1eatdirt1100% (3)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Wie Die Zeit VergingDocument11 pagesWie Die Zeit VergingViktoriaNo ratings yet
- Humss 1Document19 pagesHumss 1leizelNo ratings yet
- 30 Day Guitar & Wellness ChallengeDocument5 pages30 Day Guitar & Wellness ChallengeBhagat ChawlaNo ratings yet
- Chordu Guitar Chords Ensamble Tejedora Manabita Expresarte Música Chordsheet Id GiY7U7AjCaYDocument3 pagesChordu Guitar Chords Ensamble Tejedora Manabita Expresarte Música Chordsheet Id GiY7U7AjCaYAngelita;3 Neko:3No ratings yet
- Impressionist Music Era (1875-1925Document17 pagesImpressionist Music Era (1875-1925DolfiParthaHutagalungNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Over The Rainbow Wonderful World On Ukulele by Israël K. - UkuTabsDocument1 pageOver The Rainbow Wonderful World On Ukulele by Israël K. - UkuTabslepaulzNo ratings yet
- Dreaming of Other - CarpentariaDocument31 pagesDreaming of Other - CarpentariarewandnNo ratings yet
- San Marino 500 Manual 01Document9 pagesSan Marino 500 Manual 01Krishna DhageNo ratings yet
- A Beginner Guide To Using MotoTrbo CPSDocument9 pagesA Beginner Guide To Using MotoTrbo CPSAchmad Arizki KosasihNo ratings yet
- Birdland: Moderately Fast Jazz RockDocument3 pagesBirdland: Moderately Fast Jazz RockHollós DávidNo ratings yet
- Music-9 SLM Q1 W3-4 M3-4 V1.0-CC-releasedDocument27 pagesMusic-9 SLM Q1 W3-4 M3-4 V1.0-CC-releasedVj AleserNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)