You might also like
- Detailed Lesson Plan in General MathematicsDocument6 pagesDetailed Lesson Plan in General MathematicsAira Jane Irarum78% (18)
- 1992SGSDesignersGuidetoPowerProductsApplicationManual2Ed 1182713547Document1,298 pages1992SGSDesignersGuidetoPowerProductsApplicationManual2Ed 1182713547analog changeNo ratings yet
- Va2 Cloos Martijn 17042012Document136 pagesVa2 Cloos Martijn 17042012Julia PandreaNo ratings yet
- Fredrik ThesisDocument193 pagesFredrik ThesisCostas MoraitisNo ratings yet
- PHD Thesis 1989 Xserra PDFDocument166 pagesPHD Thesis 1989 Xserra PDFjfkNo ratings yet
- Information Theory Course Reader from Stanford UniversityDocument84 pagesInformation Theory Course Reader from Stanford Universityjohnharkin43No ratings yet
- Antennas and Propagation From A Signal Processing Perspective by Thomas Svantesson 2001Document319 pagesAntennas and Propagation From A Signal Processing Perspective by Thomas Svantesson 2001Hizbu KhanNo ratings yet
- 16-17-SERINI DavideDocument133 pages16-17-SERINI DavidesandroNo ratings yet
- Glow Discharge Plasmas in Analytical SpectroscopyFrom EverandGlow Discharge Plasmas in Analytical SpectroscopyR. Kenneth MarcusNo ratings yet
- ReportDocument92 pagesReportanthony.onyishi.242680No ratings yet
- FM Airborne Passive RadarDocument148 pagesFM Airborne Passive RadarPraphul ChandraNo ratings yet
- Glucose Measurement PaperDocument161 pagesGlucose Measurement Papersunny007_mNo ratings yet
- Measuring Noise in The VHF Band and Its Effect On Low SNRDocument187 pagesMeasuring Noise in The VHF Band and Its Effect On Low SNRwaynecard71No ratings yet
- Benstock D 2016 PHD ThesisDocument181 pagesBenstock D 2016 PHD ThesisVitor Soares AntunesNo ratings yet
- Ahmed H. Abdelrahman, Fan Yang, Atef Z. Elsherbeni, Payam Nayeri - Analysis and Design of Transmitarray Antennas-Morgan & Claypool (2017)Document155 pagesAhmed H. Abdelrahman, Fan Yang, Atef Z. Elsherbeni, Payam Nayeri - Analysis and Design of Transmitarray Antennas-Morgan & Claypool (2017)Gazalee Bashir BhatNo ratings yet
- Remote Vital Signs Monitoring Using A Mm-Wave FMCW RadarDocument118 pagesRemote Vital Signs Monitoring Using A Mm-Wave FMCW RadarThomas GuoNo ratings yet
- PSpice For Analog Communications EngineeDocument10 pagesPSpice For Analog Communications EngineeHuyThaiNo ratings yet
- Kalman FilterDocument77 pagesKalman FilterGrip of addiction100% (1)
- From Diffusion Mri To Brain Connectomics: Thèse N 3230 (2005)Document141 pagesFrom Diffusion Mri To Brain Connectomics: Thèse N 3230 (2005)Sihem ZegNo ratings yet
- Acoustic Models For AnalysisDocument128 pagesAcoustic Models For AnalysisNathalia Parra GarzaNo ratings yet
- Experimental PhysicsDocument444 pagesExperimental PhysicsJerome MeccaNo ratings yet
- (D) Antenna Array Signal Processing For Multistatic Radar Systems - Belfiori - 2013Document162 pages(D) Antenna Array Signal Processing For Multistatic Radar Systems - Belfiori - 2013Kayol MayerNo ratings yet
- Research Collection: New Developments in Electrical Resistivity ImagingDocument200 pagesResearch Collection: New Developments in Electrical Resistivity ImagingjaimemanNo ratings yet
- A Comparative Study of Analogue and Digital Mixing TechniquesDocument99 pagesA Comparative Study of Analogue and Digital Mixing TechniquesahifqlmbNo ratings yet
- NUMERICAL METHODS IN QUANTUM MECHANICSDocument101 pagesNUMERICAL METHODS IN QUANTUM MECHANICSAnderson Buarque100% (1)
- THEOREMS AND ALGORITHMS FOR MULTIPLE VIEW GEOMETRY WITH APPLICATIONS TO ELECTRON TOMOGRAPHYDocument160 pagesTHEOREMS AND ALGORITHMS FOR MULTIPLE VIEW GEOMETRY WITH APPLICATIONS TO ELECTRON TOMOGRAPHYPreeti Meena (P19EE205)No ratings yet
- Electromagnetically Induced Transparency and Squeezed LightDocument214 pagesElectromagnetically Induced Transparency and Squeezed LightRado JaNo ratings yet
- CS425 Audio and Speech Processing - Hodgkinson - 2012Document106 pagesCS425 Audio and Speech Processing - Hodgkinson - 2012Dương QuáNo ratings yet
- Brain-Machine Interface - Amir ZjajoDocument176 pagesBrain-Machine Interface - Amir ZjajoRonald Barcia100% (1)
- Dec Aim en ToDocument74 pagesDec Aim en ToThiago CoelhoNo ratings yet
- Device Parameters Characterization With The Use of EBICDocument283 pagesDevice Parameters Characterization With The Use of EBICOka Kurniawan100% (2)
- Introduction To Communication SystemsDocument469 pagesIntroduction To Communication SystemsGuillaume RossiNo ratings yet
- Introduction To Communication Systems PDFDocument469 pagesIntroduction To Communication Systems PDFTessa ZfsdfaNo ratings yet
- Interactive Topological DrawingDocument217 pagesInteractive Topological Drawingew1lNo ratings yet
- phd_ColinDocument182 pagesphd_ColinArjunAswathnarayanNo ratings yet
- Er Feg 21065Document232 pagesEr Feg 21065Kadirou BigstarNo ratings yet
- mq30512 PDFDocument123 pagesmq30512 PDFAzriNo ratings yet
- Modelling of Bang Bang PDDocument141 pagesModelling of Bang Bang PDRakesh KumarNo ratings yet
- Biometric Identification and Verification based on time-frequency analysis of Phonocardiogram SignalDocument50 pagesBiometric Identification and Verification based on time-frequency analysis of Phonocardiogram Signalnetcity143No ratings yet
- 2019 PDFDocument94 pages2019 PDFJonathan Orlando Suarez CardonaNo ratings yet
- Pitch DetectionDocument190 pagesPitch DetectionPedro Pinto100% (1)
- Introduction To Compressive Sensing 2.5Document118 pagesIntroduction To Compressive Sensing 2.5nandhinigirijavksNo ratings yet
- ArminSabanovic MScThesisDocument103 pagesArminSabanovic MScThesishamodaela2ra3mayNo ratings yet
- Main LeusDocument144 pagesMain LeusProfesor SerchNo ratings yet
- Efficient finite element modelling of ultrasound waves in elastic mediaDocument218 pagesEfficient finite element modelling of ultrasound waves in elastic mediaSutanwi LahiriNo ratings yet
- Lab ManualDocument101 pagesLab ManualJayNo ratings yet
- PhDThesis DellElceDocument204 pagesPhDThesis DellElceDiego PinheiroNo ratings yet
- Low Frequency Sound Field Enhancement System For Rectangular Rooms Using Multiple Loudspeakers - AC-phdDocument150 pagesLow Frequency Sound Field Enhancement System For Rectangular Rooms Using Multiple Loudspeakers - AC-phdmewarulesNo ratings yet
- Evolutionary Computation Applied To The Control of Sound SynthesisDocument261 pagesEvolutionary Computation Applied To The Control of Sound SynthesisBobNo ratings yet
- Thesis Bich Ngoc DoDocument72 pagesThesis Bich Ngoc DoMohammadreza RostamNo ratings yet
- Numerical Methods in QMDocument108 pagesNumerical Methods in QMadiaz100% (1)
- Measurement and Modelling of A Free-Space Optical Link and In-Field OFDM ExperimentDocument158 pagesMeasurement and Modelling of A Free-Space Optical Link and In-Field OFDM ExperimentOPTICALMIMOOFDMNo ratings yet
- Zhou Xiangwei 201112 PHDDocument151 pagesZhou Xiangwei 201112 PHDPrasad_kulkarni1No ratings yet
- Topics in Applied PhysicsDocument340 pagesTopics in Applied PhysicscpcdbrNo ratings yet
- Detection of Partial Discharges in Stator Windings of Turbine GeneratorsDocument178 pagesDetection of Partial Discharges in Stator Windings of Turbine GeneratorsStefanos DiamantisNo ratings yet
- Information Theory: Lecture Notes ForDocument193 pagesInformation Theory: Lecture Notes Forts.anirudhaNo ratings yet
- Information Theory and ApplicationsDocument293 pagesInformation Theory and ApplicationsGeorgy ZaidanNo ratings yet
- Exploiting Floating-Gate Transistor-Ozalevli Erhan 200612 PHDDocument139 pagesExploiting Floating-Gate Transistor-Ozalevli Erhan 200612 PHDSergey RosenfeldNo ratings yet
- Thesis PDFDocument159 pagesThesis PDFDivya AhujaNo ratings yet
- Electromagnetic MeasurmentsDocument232 pagesElectromagnetic Measurmentsshahram atashiNo ratings yet
- Intro Comm Systems MadhowDocument457 pagesIntro Comm Systems MadhowVineeth KumarNo ratings yet
- Methodology For The Identification of Critical Communication Networks Links and ComponentsDocument54 pagesMethodology For The Identification of Critical Communication Networks Links and Componentsrash4344No ratings yet
- MSc Music Pass NotificationDocument1 pageMSc Music Pass Notificationrash4344No ratings yet
- RSER Author Checklist TableDocument3 pagesRSER Author Checklist Tablerash4344No ratings yet
- RukusDocument8 pagesRukusrash4344No ratings yet
- 2016 HDR Bangladesh BriefingDocument8 pages2016 HDR Bangladesh Briefingrash4344No ratings yet
- IT Resources Could Be Hanging Around Any Data CenterDocument4 pagesIT Resources Could Be Hanging Around Any Data Centerrash4344No ratings yet
- Sensors 10 10506 v2Document18 pagesSensors 10 10506 v2Vary Padilla GolaNo ratings yet
- CNDocument27 pagesCNVarun GuptaNo ratings yet
- RSER Author Checklist TableDocument3 pagesRSER Author Checklist Tablerash4344No ratings yet
- ZCDDocument5 pagesZCDotavioalcaldeNo ratings yet
- Young Professionals Induction Program (OG-2) - 5th BatchDocument2 pagesYoung Professionals Induction Program (OG-2) - 5th Batchrash4344No ratings yet
- It Asset Management Skills A Person Should HaveDocument3 pagesIt Asset Management Skills A Person Should Haverash4344No ratings yet
- Calibration Free Laser-Induced Breakdown Spectroscopy (LIBS) Identification of Seawater SalinityDocument15 pagesCalibration Free Laser-Induced Breakdown Spectroscopy (LIBS) Identification of Seawater Salinityrash4344No ratings yet
- Ijaiem 2014 05 31 122Document8 pagesIjaiem 2014 05 31 122International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Distributed Control Systems: Emad Ali Chemical Engineering Department King SAUD UniversityDocument24 pagesDistributed Control Systems: Emad Ali Chemical Engineering Department King SAUD UniversitynaeemfaysalNo ratings yet
- Research Proposal Guidelines for Haas ScholarsDocument14 pagesResearch Proposal Guidelines for Haas Scholarsrash4344No ratings yet
- ppt-006 2Document20 pagesppt-006 2rash4344No ratings yet
- CRDocument14 pagesCRrash4344No ratings yet
- DLC Logo Transparent Blue 1Document1 pageDLC Logo Transparent Blue 1rash4344No ratings yet
- Faculty Application FormDocument4 pagesFaculty Application Formrash4344No ratings yet
- Brand, Trade Mark RegistrationDocument2 pagesBrand, Trade Mark Registrationrash4344No ratings yet
- The Feasibility Study of Composite Electrolytes Comprising Thermoplastic Polyurethane and Poly (Ethylene Oxide)Document8 pagesThe Feasibility Study of Composite Electrolytes Comprising Thermoplastic Polyurethane and Poly (Ethylene Oxide)rash4344No ratings yet
- Applied Sciences of HSSC Annual Examinations 2013 Part-11Document2 pagesApplied Sciences of HSSC Annual Examinations 2013 Part-11rash4344No ratings yet
- ppt-006 2Document20 pagesppt-006 2rash4344No ratings yet
- ABC Catalog 09 Lo For WebDocument20 pagesABC Catalog 09 Lo For WebsuhasdasNo ratings yet
- Session LayerDocument11 pagesSession Layerrash4344No ratings yet
- Router Pasword BreakingDocument4 pagesRouter Pasword Breakingrash4344No ratings yet
- Master Level Form 2013 FLSDocument4 pagesMaster Level Form 2013 FLSrash4344No ratings yet
- Door AlarmDocument3 pagesDoor Alarmrash4344No ratings yet
- Pharmaceutical Ingredients and Excipient - LastpptDocument72 pagesPharmaceutical Ingredients and Excipient - LastpptFANTANo ratings yet
- Liebert AC4 Controller ManualDocument88 pagesLiebert AC4 Controller ManualGreg WilliamsNo ratings yet
- MFJ-854 RF MeterDocument5 pagesMFJ-854 RF MeterHappyJoeNo ratings yet
- Encore 700 Diaphragm Pump 1Document12 pagesEncore 700 Diaphragm Pump 1bagurtoNo ratings yet
- Image Forgery DetectionDocument17 pagesImage Forgery DetectionanlemacoNo ratings yet
- Binzel - Katalog MAGDocument64 pagesBinzel - Katalog MAGAdrian KustraNo ratings yet
- Memories of HomeDocument14 pagesMemories of HomeMary Francis Edmer SayconNo ratings yet
- Acute Severe Asthma Hospital ManagementDocument1 pageAcute Severe Asthma Hospital ManagementItharshan IndreswaranNo ratings yet
- The Image of The CityDocument17 pagesThe Image of The CityMay Rose ParagasNo ratings yet
- General Biology 1: Go Fast, or Slow Down?Document23 pagesGeneral Biology 1: Go Fast, or Slow Down?Mikhael OiraNo ratings yet
- Studyguide TracksDocument75 pagesStudyguide TracksAnonymous FabB2WJl485% (13)
- Lista de Precios Tones y Staleks 01.04Document3 pagesLista de Precios Tones y Staleks 01.04Maria T. OliverosNo ratings yet
- FCV585 FCV620 Operator's Manual G 1-7-11Document57 pagesFCV585 FCV620 Operator's Manual G 1-7-11Katia QuispeNo ratings yet
- 9709 s15 QP 12Document4 pages9709 s15 QP 12Abrar JahinNo ratings yet
- 0610 m16 QP 62Document12 pages0610 m16 QP 62faryal khanNo ratings yet
- 2GIG KEY2 345 Install GuideDocument2 pages2GIG KEY2 345 Install GuideAlarm Grid Home Security and Alarm MonitoringNo ratings yet
- A Thing of Beauty Analysis by Sharvaree S. ChavanDocument12 pagesA Thing of Beauty Analysis by Sharvaree S. Chavansharu11No ratings yet
- Simulation of bitumen upgrading processes modelling and optimisationDocument6 pagesSimulation of bitumen upgrading processes modelling and optimisationDonato MontroneNo ratings yet
- Memorial Garden Policies and Guidelines St. Mark's Episcopal Church, Raleigh, North CarolinaDocument7 pagesMemorial Garden Policies and Guidelines St. Mark's Episcopal Church, Raleigh, North Carolinaestela maria dulaganNo ratings yet
- Tables and Bar ChartsDocument7 pagesTables and Bar ChartsVictoria FedoseevaNo ratings yet
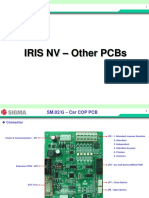
- 07 IRIS NV PCB OtherDocument15 pages07 IRIS NV PCB OtherArnaldo cordovaNo ratings yet
- Management Foreign BodyDocument6 pagesManagement Foreign BodyRahmatia SyukrinaNo ratings yet
- Pasture FatteningDocument15 pagesPasture FatteningKartika PurnamasariNo ratings yet
- Explore the beaches and parks of Labuan IslandDocument2 pagesExplore the beaches and parks of Labuan IslandDudeNo ratings yet
- Erotic MassageDocument113 pagesErotic MassageMahmoud El Mohamdy75% (4)
- HydrotherapyDocument52 pagesHydrotherapyMpt Sports100% (1)
- Do Not Open This Booklet Until Told To Do So: Question Booklet Series: - Question Booklet No.Document7 pagesDo Not Open This Booklet Until Told To Do So: Question Booklet Series: - Question Booklet No.Rakesh KumawatNo ratings yet
- Common Mistakes in Dimensional Calibration MethodsDocument16 pagesCommon Mistakes in Dimensional Calibration MethodssujudNo ratings yet