APACT04, Bath
April 26-28, 2004
Model Predictive Control:
A Success Story Continues
Frank Allgwer *
Institute for Systems Theory in Engineering
University of Stuttgart
�Some Facts about Model Predictive Control
Widely accepted in process industries as the advanced control
methodology
Tremendous impact on academic process control community, e.g.:
1. 919 papers published in 2002 in area of MPC (Inspec)
2. IFAC Adchem 2003, 30% of submitted control papers are in
the MPC area
3. (at least) four special journal issues being prepared at present
Commercially very successful
�Non-exhaustive MPC Vendor List
ABB
ACT
Adaptics
Adaptive Resources
Adersa Home Page
Aspen Technology
Aurel Systems Inc.
Batch CAD
Bonner and Moore
Brainwave
C.F. Picou and Associates
Chemstations
Comdale Technologies
Control Arts Inc.
Control Consulting Inc.
Control Dynamics Homepage
Controlsoft Incorporated
Cybosoft
DOT Products
Trieber Controls
Yokogawa APC
US Process Control L.L.C.
Eldridge Engineering Inc.
Elsag Bailey
Envision Systems Inc.
Gensym
Enterprise Control Technologies
Fantoft Process Group
MATHWORKS
Honeywell
Hyprotech
Inferential Control Company
IntellOpt
Knowledgescape
MDC Technology
Neuralware
Nexus Engineering
Objectspace
Optimal Control Research
Pavilion Technologies
Predictive Control Ltd.
Process System Consultants
RSI
Simulation and Advanced Controls Inc.
Simtech
Texas Controls Inc.
�Structure of Presentation
A short introduction to theory and practice of MPC
Linear vs. nonlinear MPC
Efficient nonlinear MPC formulation
Conclusion of presentation:
Nonlinear model predictive control of realistically sized chemical
processes possible, if
(i) state of the art NMPC formulations,
(ii) specialized NMPC optimizers
are used.
�Typical Control Problem
x = f (x, u),
x(0) = x0
Find stabilizing control strategy that
minimizes objective functional
Z
J =
F (x( ), u( ))d
t
satisfies constraints
u( ) U
x( ) X
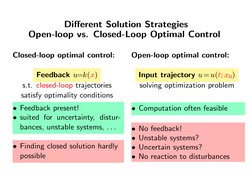
�Different Solution Strategies
Open-loop vs. Closed-Loop Optimal Control
Closed-loop optimal control:
Open-loop optimal control:
Feedback u=k(x)
s.t. closed-loop trajectories
satisfy optimality conditions
Feedback present!
suited for uncertainty, disturbances, unstable systems, . . .
Finding closed solution hardly
possible
Input trajectory u = u(t; x0)
solving optimization problem
Computation often feasible
No feedback!
Unstable systems?
Uncertain systems?
No reaction to disturbances
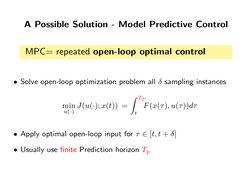
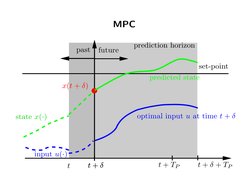
�A Possible Solution - Model Predictive Control
MPC= repeated open-loop optimal control
Solve open-loop optimization problem all sampling instances
min J(u(); x(t)) =
u()
TP
F (x( ), u( ))d
Apply optimal open-loop input for [t, t + ]
Usually use finite Prediction horizon Tp
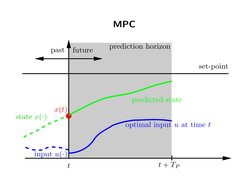
�MPC
past
future
prediction horizon
set-point
predicted state
x(t)
state x()
optimal input u at time t
input u()
t
t + TP
�MPC
past
future
prediction horizon
set-point
predicted state
x(t + )
optimal input u at time t +
state x()
input u()
t
t+
t + TP
t + + TP
�Characteristics of MPC
Moving horizon implementation
Performance oriented time domain formulation
Incorporation of constraints
Explicit system model used to predict future plant dynamics
�Linear MPC - Nonlinear MPC
Linear MPC
Uses linear model: x = Ax + Bu
Quadratic cost function F = xT Rx + uT Ru
Linear constraints Hx + Gu < 0
Quadratic program
Nonlinear MPC (NMPC)
Nonlinear model: x = f (x, u)
Cost function can be nonquadratic F (x, u)
Nonlinear constraints h(x, u) < 0
Nonlinear program
�A Brief History of MPC
Idea is rather old:
One technique for obtaining a feedback controller synthesis
from knowledge of open-loop controllers is to measure the
current control process state and then compute vary rapidly for
this the open-loop control function. The first portion of this
function is then used during a short time interval, after which
a new value of the function is computed for this measurement,
The process is then repeated.
(Lee & Marcus, 1967)
�A Brief History of MPC
cont.
Early industrial MPC applications:
Model Predictive Heuristic Control (IDCOM)
Richalet et al. 1976 . . .
Adersa
Dynamic Matrix Control (DMC)
Cutler & Ramaker 1979 . . .
Shell Oil
Academic research:
Few early theoretical investigations:
Kleinmann 1970, Thomas 1975, Chen & Shaw 1982, . . .
Predictive control theory:
Keerthi & Gilbert 1988, Mayne & Michalska 1990, . . .
�Linear MPC: Commercial Products
By now linear MPC is a fully established
advanced control method:
Already in 1995 over 2200 applications reported
First, mainly applications in refining/petrochemical sector
By now much broader scope
Large applications (603 x 283, DMC Corp.)
Significant benefits reported
Virtually all MPC applications up to mid 90s use
linear step or impulse response models
Models found by suitable identification
MPC Software often includes identification modules
Online computations require solution of QP
�Linear MPC Applications
Area
Refining
Petrochemicals
Chemicals
Pulp and Paper
Air and Gas
Utility
Mining/Metallurgy
Food Processing
Polymer
Furnaces
Aerospace/Defense
Automotive
Unclassified
Total
Aspen Honeywell Adersa PCL SGS Total
Tech
Hi-Spec
1200
480
280
25
1985
450
80
20
550
100
20
3
21
144
18
50
10
10
6
7
41
4
16
10
17
42
13
40
1833
40
696
UT/ TWMCC/AspenTech 1
1045
1438
3
7
26
125
450
450
68
10
14
37
51
17
45
13
7
1601
4542
S. Joe Qin and T. A. Badgwell
�Possible Benefits of NMPC
Improved controller performance due to the ability to use better
(=nonlinear) models
Enlargement of application field
regulation problems with
highly nonlinear processes
large disturbances
servo control problems with frequently changing operation
points
control of batch processes
...
�Application of NMPC to a Chemical Reactor
Cyclopentenol Production
V, A, Tf
Klatt/Engell/Kremling/Allgower 93
Van der Vusse reaction scheme:
A
2
1
B
C
VR
V, A, B, C, D
QK
3
2A
D
controlled variables:
manipulated variables:
disturbances:
concentration cB
flow rate V
feed temperature Tf , cA0
2
c A = V (cA0 cA) k1()cA k3()cA ,
c B = V cB + k1() cA k2()cB ,
1
= V (0 )
k1()cAHRAB + k2()cB HRBC
Cp
�
k w AR
2
+k3()cA HRAD +
(K )
CpVR
�
�
1
K =
QK + kw AR ( K )
mK CP K � �
Ei
ki() = ki0exp
, i = 1, 2, 3
�Operation at Point of Optimal Yield
1.1
2
Yield:
�
cBs ��
s =
cA �
0
at optimum:
�
=
u opt
Kopt
0
=0
y �
=
u opt
1
1.0
Ks
-1
0.9
5
10
15
us
gain changes sign at optimal operating point
strong nonlinearity
not integral controllable
20
25
30
35
�NMPC of the Chemical Reactor
V, A, Tf
Control task:
VR
V, A, B, C, D
rejection of disturbances in Tf , cA0
setpoint changes in cBs
input constraints in V
control tolerance 0.02 mol
l
QK
NMPC setup:
performance index: J =
R t+Tp
t
output feedback case (EKF)
(cB cBs)2dt
�Performance of NMPC-controller
1.2
Output
� mol �
cB
1.1
setpoint
1
0.9
30
Input
� 1 �
V h
20
10
0
0
x
scenario
500
1000
1500
Tf = 100o C
2000
Time[s]
2500
3000
3500
4000
Tf = 115o C
|
{z
}|
{z
}
model/plant mismatch
model/plant mismatch
case 1
case 2
�Control for Optimal Yield
task: on-line optimization of yield J =
1.3
Output
� mol �
cB
R t+Tp
t
c2B ( )d
1.2
1.1
1
0.9
40
30
Input
� 1 �
V h
20
10
0
0
x
cA0
h mol i
l
Tf [o C]
500
1000
1500
2000
2500
Time[s]
3000
3500
4000
4500
5.1
4.5
4.5
5.7
4.5
104.9
100
115
5000
�Comparison to Set-point Control
setpoint control
yield optimization
0.22
yield
0.21
0.2
0.19
production
rate
� mol �
V cB h
NT $
x.
h
i
cA0 mol
l
400
300
200
0
5.1
500
1000
1500
2000
Time[s]
2500
5.7
production rate doubled
3000
3500
4000
�Linear vs. Nonlinear MPC
Reasons for present dominance of LMPC:
Linear models can be straightforwardly identified from
process test data
Efficient implementation of LMPC possible
LMPC QP has to be solved
NMPC NLP has to be solved
Tuning for stability easy for LMPC
�Issues in Nonlinear MPC
System theoretic formulation and investigation:
stability, performance, robustness, ...
Implementation issues:
efficient and reliable real-time optimization, modeling, ...
�Efficient Numerical Solution of the Open-Loop
Optimal Control Problem
Typically solved by finite dimensional input parameterization
Can, for example be solved by: direct multiple shooting method
u
6
xu *i
xi
u
u
u
u
u
u
sN
sN1
x0 uu u u
t t1 t2
u
u
u-
tN1 tN
x0 uu us1 u
t t1 t 2
u
u
tN1 tN
Optimization problem shows special sparse structure
Consecutive optimization problems are similar
use efficient hot starting/embedding strategy
State of the art solution strategy, specially tailored to NMPC
allows real-time solution for realistically sized problems
(based on MUSCOD II, [Diehl et al.] )
�Approximate Solution: Real-time Iteration Scheme
Question:
Is it really necessary to solve optimal control problem exactly?
Often sufficient to perform only one SQP subiteration per sampling time if:
special update is used
close to optimal solution
Can be performed fast
Rigorous stability proof available
[Diehl/Findeisen/Allg
ower/Bock/Schl
oder 03]
Real-time iteration scheme
Expands range of applicability (faster systems, ...)
Utilizes inherent robustness of NMPC
�Issues in Nonlinear MPC
System theoretic formulation and investigation:
stability, performance, robustness, ...
Implementation issues:
efficient and reliable real-time optimization, modeling, ...
�An Important Issue in (N)MPC Theory
Even in nominal case:
no model plant mismatch
no disturbances
Predicted open-loop
trajectories
6=
Closed-loop trajectories
x(t) x(t + ) finite horizon
t + TP
t + + TP
�An Important Issue in (N)MPC Theory
x(t)
Even in nominal case:
no model plant mismatch
no disturbances
x(t + 2)
x(t + 3)
Predicted open-loop
trajectories
6=
Closed-loop trajectories
R
Performance? Goal: min 0 F (x( ), u( ))d . What is achieved
R t+Tp
by repeatedly minimizing t F (x( ), u( ))d ?
Stability? Why should the closed-loop be stable?
Schemes that guarantee stability?
�Dilemma of NMPC
Guaranteed Stability versus Performance
good performance
Large horizon
closed loop stability
computationally
not feasible
Need for short horizon formulations that achieves
good performance and stability
2 possible approaches:
choose Tp, F , . . . s.t. closed loop is stable
design NMPC scheme, s.t. closed loop is stable independent of
choice of Tp, . . . guaranteed stability NMPC scheme
�Zero Terminal Constraint NMPC
[Keerthi, Gilbert 88, Mayne, Michalska 90]
Simplest NMPC scheme with guaranteed stability
min J(x(t), u)
u
Z t+Tp
J()=
F (x( ), u( ))d
x(t)
subject to: x = f (x, u),
system dynamics
x(t) given
state feedback
u( ) U
input constraints
x( ) X
state constraints
x(t + Tp) = 0 zero terminal const.
+ stability
- feasibility, performance for short horizons?
- computationally not feasible
x(t + TP ) = 0
�NMPC Schemes with guaranteed stability
Avoid ZTC, instead use
terminal region constraint
virtual local control law inside of terminal region that allows
infinite prediction approximation via E(x(t + Tp))
min J(x(t), u)
u
Z
J()=
t+Tp
F (x( ), u( ))d+E(x(t + Tp))
x(t)
subject to: x = f (x, u),
system dynamics
x(t) given
state feedback
u( ) U
input constraints
x( ) X
state constraints
x(t + Tp) terminal constraint
x(t + TP )
E(t + TP )
Terminal penalty term E(x(t + Tp)) approximates
infinite horizon cost in terminal region
i.e. Quasi-infinite horizon NMPC [Chen, Allg
ower 1997]
�Guaranteed Stability
[Chen&Allg
ower 98], [Mayne et.al. 00], [Fontes 01]
min J(x(t), u)
u
Z
with: J()=
t+Tp
F (x( ), u( ))d +E(x(t + Tp))
and: x(t + Tp)
Nominal Stability: If
a) E() and s.t.:
x u U with
E
f (x, u) + F (x, u) < 0
x
b) optimization feasible for t = 0
R
x(t)
E(x(t + TP ))
Asymptotic Stability
Guaranteed Region of Attraction:
Set R of states satisfying b)
horizon performance approx. even for small TP
Advantages: guaranteed stability
�Comments
Many schemes fit into this setup:
Quasi-infinite horizon NMPC
Simulation-approximated infinite horizon NMPC
CLF approaches
[Jadbabaie et. al.
...
How to determine E, ?
[Chen&Allg
ower 97]
[De Nicolao et.al.97]
99, Primbs et.al. 00]
Exemplatory quasi-infinite horizon NMPC:
Jacobian linearization stabilizable
quadratic cost function
F (x, u) = xT( )Qx( ) + uT( )Ru( )
E(x) = xT P x
:= {x Rn|xT P x }
P is solution of Lyapunov equation
is solution semi-infinite optimization
�NMPC Theory in the 90s:
Instantaneous State Feedback NMPC
Assumptions:
On-line computation of optimal input trajectory u? requires
no computation time
(instantaneous solution)
Continuous application of
optimal input u = u?(x), i.e. 0
(instantaneous implementation)
predicted state
x(t + )
input u
x(t)
state x()
input u()
t+
Unrealistic assumptions, however
(i) allows to develop system theoretic understanding
(ii) lays basis for development of methodological tools
key focus on stability issue
t + TP t + TP +
�Sampled-Data Output Feedback NMPC: Wrap Up
Under certain conditions it is possible to extend the state feedback
stability results to the sampled-data output-feedback case
Problems:
When are the assumptions satisfied?
Value function uniformly continuous in R?
Separation requires fast enough error convergence of observer
I measurement noise?
Present results must be seen as a first step towards
a practical output feedback NMPC scheme
�Application of NMPC to a Distillation Column
Separation of liquid mixtures
into its components
xD
40
D
28
T28
F, XF
21
14
V
1
Q
xB
B
T14
�Application of NMPC to a Distillation Column
xD
40
D
28
T28
Objective: keep xD , xB at setpoints
inferential control: T14, T28 controlled variables
Disturbances: F , xF
Manipulated variables: L, V
F, XF
21
14
Sampling time = 30s
T14
V
1
Models of different sizes available:
5th, 42nd, 164th, 204th order
States estimated from T14, T28
Quadratic weights on deviation from set-points
xB
B
Methanol/n-Propanol
High purity separation
Performance?
Computational feasibility?
�Simulations: Performance + Computation
3
x 10
x28x28s
1
0
1
6
VVs [kmol/s]
x 10
2
1
0
CPU time [s]
164th order model
42nd order model
5th order model
0
0
500
1000
1500
2000
time [s]
2500
3000
3500
Feed concentration disturbances (+10, 15, +5 %)
Quasi-infinite horizon NMPC
Efficient dynamic optimization approach (multiple shooting, MUSCOD-II)
Only Simulations. How about real application?
�Pilot Plant for Experiments
Located at Institute for System Dynamics and Control, University of Stuttgart
�Experimental Results
NMPC
PI Controller
T28 [oC]
71
204th order model
70.5
2 PI control loops:
T14 L, T28 Q
70
Q [kW]
feed flow increase by
20% at t = 1000s
2.5
2
0
1000 2000 3000
time [s]
1000 2000 3000
time [s]
NMPC is computationally feasible and delivers good performance
�Conclusions
Gave a short introduction to NMPC
Linear MPC is a well established advanced control technology
Nonlinear MPC is generally seen to hold much promise
In the past decade a NMPC control theory was developed based
on instantaneous considerations
Current research focuses on extensions to realistic scenarios
output feedback
sampled-data implementation
robustness
computational issues
Showed experimental results that prove feasibility of methodology
for industrially sized problems
NMPC will have a significant impact in nonlinear
control applications over the next five years