You might also like
- Aero Elasticity Prof. C.V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 3Document26 pagesAero Elasticity Prof. C.V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 3Sayan PalNo ratings yet
- Lec 5Document11 pagesLec 5Akshay PhilipNo ratings yet
- Deflection of Beams - II: Superposition MethodDocument37 pagesDeflection of Beams - II: Superposition MethodSHOBHA SUTHARNo ratings yet
- Design eccentric steel connections using rivet jointsDocument26 pagesDesign eccentric steel connections using rivet jointsDarsHan MoHan100% (1)
- General Motion of A Particle in Three Dimensions: Analytical MechanicsDocument17 pagesGeneral Motion of A Particle in Three Dimensions: Analytical MechanicsMel GalzNo ratings yet
- Wave Hydro Dynamics Prof. V. Sundar Department of Ocean Engineering Indian Institute of Technology, MadrasDocument26 pagesWave Hydro Dynamics Prof. V. Sundar Department of Ocean Engineering Indian Institute of Technology, MadrasMuralidhar YarakalaNo ratings yet
- Dynamics of MachinesDocument14 pagesDynamics of MachinesIshu GoelNo ratings yet
- Lec3 1 PDFDocument13 pagesLec3 1 PDFsuhail khanNo ratings yet
- Structural Analysis - II Prof. P. Banerjee Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 05Document14 pagesStructural Analysis - II Prof. P. Banerjee Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 05Thiaga RajanNo ratings yet
- Lec35 PDFDocument15 pagesLec35 PDFmanishNo ratings yet
- Statics and Dynamics Prof. Sivakumar Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 13 Statics - 2.9Document18 pagesStatics and Dynamics Prof. Sivakumar Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 13 Statics - 2.9Dharmendra JainNo ratings yet
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 35Document8 pagesStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 35Dharmendra JainNo ratings yet
- NPTEL FEM Lec6Document29 pagesNPTEL FEM Lec6EliNo ratings yet
- Lec11 PDFDocument25 pagesLec11 PDFAbhishek AroraNo ratings yet
- Theoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleDocument12 pagesTheoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleHow to do anything By HimanshuNo ratings yet
- Classical Mechanics: From Newtonian To Lagrangian FormulationDocument9 pagesClassical Mechanics: From Newtonian To Lagrangian Formulationchirag jainNo ratings yet
- Lec 32Document33 pagesLec 32donaNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 11Document25 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 11abimanaNo ratings yet
- Wave Hydro Dynamics Prof. V. Sundar Department of Ocean Engineering Indian Institute of Technology, MadrasDocument32 pagesWave Hydro Dynamics Prof. V. Sundar Department of Ocean Engineering Indian Institute of Technology, MadrasMuralidhar YarakalaNo ratings yet
- Lec6 PDFDocument30 pagesLec6 PDFTesh SiNo ratings yet
- Lec33 PDFDocument50 pagesLec33 PDFNatarajan SaravananNo ratings yet
- Lec 12Document17 pagesLec 12Anonymous 8f2veZfNo ratings yet
- Governors Part 2Document11 pagesGovernors Part 2Subash RajeshNo ratings yet
- Forced Harmonic VibrationsDocument31 pagesForced Harmonic VibrationsVigil J VijayanNo ratings yet
- Understanding Equilibrium of Forces on an Inclined Plane Using Free Body DiagramsDocument10 pagesUnderstanding Equilibrium of Forces on an Inclined Plane Using Free Body DiagramsDharmendra JainNo ratings yet
- Lec 30Document12 pagesLec 30Touts ToutsNo ratings yet
- Eccentric Connection DesignDocument14 pagesEccentric Connection DesignprasadNo ratings yet
- Lec 5Document28 pagesLec 5prince francisNo ratings yet
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 04Document9 pagesStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 04Dharmendra JainNo ratings yet
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurDocument18 pagesComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpurk krishna chaitanyaNo ratings yet
- Lec 14Document13 pagesLec 14Janaki RamanNo ratings yet
- Lec26 PDFDocument17 pagesLec26 PDFRakesh Kumar RautarayNo ratings yet
- Lec 28Document34 pagesLec 28sknlndsaNo ratings yet
- Lec 3Document7 pagesLec 3tonydisojaNo ratings yet
- Dynamic Response For Continuous SystemsDocument18 pagesDynamic Response For Continuous SystemsDarsHan MoHan0% (1)
- Fluid Mechanics Prof. T. I. Eldho Department of Civil Engineering Indian Institute of Technology, BombayDocument35 pagesFluid Mechanics Prof. T. I. Eldho Department of Civil Engineering Indian Institute of Technology, BombayAjit ParwaniNo ratings yet
- Lec 29Document17 pagesLec 29Munzuara Akther MiraNo ratings yet
- Lec 33Document41 pagesLec 33SHOBHA SUTHARNo ratings yet
- Dynamics of Physical Systems - Lec02Document19 pagesDynamics of Physical Systems - Lec02rdsrajNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument20 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaNo ratings yet
- Lec 9Document25 pagesLec 9SURENDRA PANDANo ratings yet
- Soil FoundationDocument14 pagesSoil FoundationvinayNo ratings yet
- Lec 22Document28 pagesLec 22Shreyas Gupta 4-Yr B.Tech. Chemical Engg., IIT (BHU) VaranasiNo ratings yet
- Lec 5Document23 pagesLec 5abimanaNo ratings yet
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument33 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasSri DNo ratings yet
- Lec20 PDFDocument24 pagesLec20 PDFmahendranNo ratings yet
- CelerityDocument23 pagesCelerityswabrightNo ratings yet
- Propeller Characteristics in Open WaterDocument15 pagesPropeller Characteristics in Open WaterTommyVercettiNo ratings yet
- Finite Element Analysis Prof. Dr.B.N.Rao Department of Civil Engineering Indian Institute of Technology, MadrasDocument35 pagesFinite Element Analysis Prof. Dr.B.N.Rao Department of Civil Engineering Indian Institute of Technology, Madrasshrikant belsareNo ratings yet
- Marine Structures Theories of FailureDocument18 pagesMarine Structures Theories of FailureJanaki RamanNo ratings yet
- SIF For Embedded CracksDocument24 pagesSIF For Embedded CracksArpan NandyNo ratings yet
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument35 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasParmeshwar KushwahaNo ratings yet
- Lec14 4 PDFDocument13 pagesLec14 4 PDFDharmendra JainNo ratings yet
- Lecture 15 & 16 Work and EnergyDocument12 pagesLecture 15 & 16 Work and Energyrizal123No ratings yet
- Introduction to Statics MomentsDocument15 pagesIntroduction to Statics MomentsHussein HassanNo ratings yet
- Lec19 PDFDocument24 pagesLec19 PDFTesh SiNo ratings yet
- Computational Fluid Dynamics, NPTEL Lecture 42 by Suman ChakraborthyDocument31 pagesComputational Fluid Dynamics, NPTEL Lecture 42 by Suman ChakraborthyShubhankar Gurav 16210094No ratings yet
- Lec 65Document9 pagesLec 65prince francisNo ratings yet
- CFD Lecture on Flow Visualization Lines and Governing EquationsDocument19 pagesCFD Lecture on Flow Visualization Lines and Governing EquationsShahzaib Anwar OffNo ratings yet
- TorsionDocument14 pagesTorsionProninaNo ratings yet
- Matrices7 2009 1Document2 pagesMatrices7 2009 1TravisbossNo ratings yet
- TorsionDocument14 pagesTorsionProninaNo ratings yet
- HttpsDocument1 pageHttpsAnonymous 8f2veZfNo ratings yet
- Thermal OpcDocument10 pagesThermal OpccyapNo ratings yet
- CES 6116 FEM Review of Matrix AnalysisDocument46 pagesCES 6116 FEM Review of Matrix AnalysisVeronica TobiasNo ratings yet
- BV Variable Load Spring SupportsDocument15 pagesBV Variable Load Spring SupportsMichael WaltersNo ratings yet
- ,qioxhqfh /LQHV) Ru 6wdwlfdoo/ 'Hwhuplqdwh 6wuxfwxuhvDocument38 pages,qioxhqfh /LQHV) Ru 6wdwlfdoo/ 'Hwhuplqdwh 6wuxfwxuhvMawanda TonnyNo ratings yet
- Theory of Buckling and Post Buckling Behavior of Elastic Structures PDFDocument65 pagesTheory of Buckling and Post Buckling Behavior of Elastic Structures PDFAnonymous 8f2veZfNo ratings yet
- Matrix Primer Lect2 PDFDocument15 pagesMatrix Primer Lect2 PDFTarun BharadwajNo ratings yet
- Buling Thermal Analysis GoodDocument19 pagesBuling Thermal Analysis GoodAhsan SattarNo ratings yet
- 17 - Yield Line Theory For SlabsDocument9 pages17 - Yield Line Theory For SlabsRavindra MR100% (1)
- StrucschemesyllDocument26 pagesStrucschemesyllSagar R GowdaNo ratings yet
- Acsa Am 84 1Document6 pagesAcsa Am 84 1Ronald CostalesNo ratings yet
- BV Variable Load Spring SupportsDocument15 pagesBV Variable Load Spring SupportsMichael WaltersNo ratings yet
- Matrix Primer Lect2 PDFDocument15 pagesMatrix Primer Lect2 PDFTarun BharadwajNo ratings yet
- Yield Line Theory (Examples) : Suhaimi Abu Bakar, PHDDocument15 pagesYield Line Theory (Examples) : Suhaimi Abu Bakar, PHDUmange RanasingheNo ratings yet
- CHAPTER 2: UNIT LOAD METHOD FOR BEAM DEFLECTION AND SLOPE ANALYSISDocument51 pagesCHAPTER 2: UNIT LOAD METHOD FOR BEAM DEFLECTION AND SLOPE ANALYSISAnonymous 8f2veZf100% (2)
- Yield Line Theory (Examples) : Suhaimi Abu Bakar, PHDDocument15 pagesYield Line Theory (Examples) : Suhaimi Abu Bakar, PHDUmange RanasingheNo ratings yet
- Yield Line Theory (Examples) : Suhaimi Abu Bakar, PHDDocument15 pagesYield Line Theory (Examples) : Suhaimi Abu Bakar, PHDUmange RanasingheNo ratings yet
- Design of Tension MembersDocument38 pagesDesign of Tension Memberser_zaheer50% (2)
- Cremona Diagram For Truss AnalysisDocument14 pagesCremona Diagram For Truss AnalysisAnton Husen PurboyoNo ratings yet
- ME101 Lecture11 KDDocument21 pagesME101 Lecture11 KDmoondonoo7No ratings yet
- Yield Line Theory (Examples) : Suhaimi Abu Bakar, PHDDocument15 pagesYield Line Theory (Examples) : Suhaimi Abu Bakar, PHDUmange RanasingheNo ratings yet
- Torsion of Circular Bars and FormulasDocument25 pagesTorsion of Circular Bars and FormulasAjoy Kumar PandeyNo ratings yet
- Torsion of Circular Bars and FormulasDocument25 pagesTorsion of Circular Bars and FormulasAjoy Kumar PandeyNo ratings yet
- Yield Line Theory (Examples) : Suhaimi Abu Bakar, PHDDocument15 pagesYield Line Theory (Examples) : Suhaimi Abu Bakar, PHDUmange RanasingheNo ratings yet
- Yield Line Theory (Examples) : Suhaimi Abu Bakar, PHDDocument15 pagesYield Line Theory (Examples) : Suhaimi Abu Bakar, PHDUmange RanasingheNo ratings yet
- Samsul Alam - BME1802015306 - ME324Document4 pagesSamsul Alam - BME1802015306 - ME3245306KapnaSamsul AlamNo ratings yet
- Passive Solar Home Design Guide for Heating and CoolingDocument6 pagesPassive Solar Home Design Guide for Heating and CoolingHaktasticDemonNo ratings yet
- Recommendations For The Design of Bridges To BS EN 1993: Published DocumentDocument94 pagesRecommendations For The Design of Bridges To BS EN 1993: Published DocumentMohammed RiazNo ratings yet
- Finite Element Techniques I N Groundwater Flow Studies: Developments in Geotechnical Engineering 61Document320 pagesFinite Element Techniques I N Groundwater Flow Studies: Developments in Geotechnical Engineering 61esteban0barahonaNo ratings yet
- Manual Entry of Properties For 2-Phase VL Mixtures With Aspen EDRDocument7 pagesManual Entry of Properties For 2-Phase VL Mixtures With Aspen EDRreclatis14No ratings yet
- 2015 VN Single InverterDocument29 pages2015 VN Single InverterMinhvan LeNo ratings yet
- Antennas and PropagationDocument3 pagesAntennas and PropagationAgusto PanganibanNo ratings yet
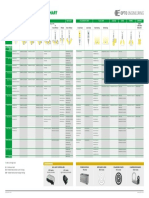
- LED Illuminators Selection ChartDocument1 pageLED Illuminators Selection ChartSamir BagalkoteNo ratings yet
- 01 - Chemistry Thermo TestDocument11 pages01 - Chemistry Thermo TestDeepakGuptaNo ratings yet
- Is.1893 Codebook PDFDocument25 pagesIs.1893 Codebook PDFArbaz HussainNo ratings yet
- EP Corrosion PDFDocument57 pagesEP Corrosion PDFHatem JafouraNo ratings yet
- Ref 17Document11 pagesRef 17Gabriel BatistaNo ratings yet
- Introduction To Orbitalaft Engineers CHARTS REV ADocument203 pagesIntroduction To Orbitalaft Engineers CHARTS REV Amariela baigorriaNo ratings yet
- ACOUSTICS and LIGHTING REVIEWERDocument25 pagesACOUSTICS and LIGHTING REVIEWERJoyce Ellen Hernandez Javier100% (1)
- Nanoparticles: Properties, Applications and Toxicities: Arabian Journal of ChemistryDocument24 pagesNanoparticles: Properties, Applications and Toxicities: Arabian Journal of Chemistryrazor926No ratings yet
- Science 2Document16 pagesScience 2RicalynNo ratings yet
- CO2 Miscible - ImmiscibleDocument21 pagesCO2 Miscible - ImmiscibleAkmuhammet MammetjanovNo ratings yet
- Hyd Ref 6Document2 pagesHyd Ref 6Dominick TaguinodNo ratings yet
- Aramco CBT Questions-Answere For QAQC WeldingDocument10 pagesAramco CBT Questions-Answere For QAQC WeldingAbdul HafeezNo ratings yet
- Project Sherazi 12april2010Document159 pagesProject Sherazi 12april2010Carlos MarquezNo ratings yet
- Summative Test No. 2 in Chemistry 2 (Q3)Document2 pagesSummative Test No. 2 in Chemistry 2 (Q3)Franzhean Balais CuachonNo ratings yet
- Liquid Rinq Vacuum Pumps - Troubleshooting TipsDocument2 pagesLiquid Rinq Vacuum Pumps - Troubleshooting TipsrahulNo ratings yet
- Loading LPG Cargo and Related Safety FactorsDocument5 pagesLoading LPG Cargo and Related Safety FactorsVasil RaykovNo ratings yet
- Ahu IomDocument36 pagesAhu IomMuhammad Faheem ShahbazNo ratings yet
- Greenhouse Effect Experiment Lab 1Document4 pagesGreenhouse Effect Experiment Lab 1api-320549212100% (1)
- Chapter 7 Semiconductor Detectors: P (T) CT Exp (-E /2kT)Document18 pagesChapter 7 Semiconductor Detectors: P (T) CT Exp (-E /2kT)Phani TejaNo ratings yet
- How Asphalt Pavement Temperature Affects Deflection and RigidityDocument16 pagesHow Asphalt Pavement Temperature Affects Deflection and RigidityBesim QelajNo ratings yet
- Venturi MeterDocument15 pagesVenturi MeterFatimah BadruddinNo ratings yet
- Chapter 5 - Design of Wood FramingDocument162 pagesChapter 5 - Design of Wood FramingJuan0% (1)
- Weekly Home Learning Plan For Grade 12 STEM in Gen Physics 1, Quarter 2, Online Distance LearningDocument4 pagesWeekly Home Learning Plan For Grade 12 STEM in Gen Physics 1, Quarter 2, Online Distance LearningM. Darius LagascaNo ratings yet
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeFrom EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeRating: 4 out of 5 stars4/5 (130)
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Biogas Production: Pretreatment Methods in Anaerobic DigestionFrom EverandBiogas Production: Pretreatment Methods in Anaerobic DigestionNo ratings yet
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- The Long Hangover: Putin's New Russia and the Ghosts of the PastFrom EverandThe Long Hangover: Putin's New Russia and the Ghosts of the PastRating: 4.5 out of 5 stars4.5/5 (76)
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Industrial Waste Treatment HandbookFrom EverandIndustrial Waste Treatment HandbookRating: 5 out of 5 stars5/5 (1)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Grid-Scale Energy Storage Systems and ApplicationsFrom EverandGrid-Scale Energy Storage Systems and ApplicationsFu-Bao WuNo ratings yet
- Carbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersFrom EverandCarbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersRating: 4.5 out of 5 stars4.5/5 (2)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet