You might also like
- Fatigue Tutorial v81Document11 pagesFatigue Tutorial v81cooljovinNo ratings yet
- FEA Benchmark For Dynamic Analysis of Perforated PlatesDocument18 pagesFEA Benchmark For Dynamic Analysis of Perforated Platesmatteo_1234No ratings yet
- Finite element analysis is useful numerical technique to solve various structural problems. In this paper FEA model of slab column connection is model using ANSYS 16.0 . Punching shear failure is a major problem encountered in the design of reinforced concrete flat plates. The utilization of shear reinforcement via shear studs or other means has become a choice for improving the punching shear capacity .The obtained results indicate that, the proposed shear reinforcement system and drop panel has a positive effect in the enhancement of both the punching shear capacity and the strain energy of interior slab–column connection of both normal and high strength concrete. The general finite element software ANSYS can be used successfully to simulate the punching shearbehaviour of reinforced concrete flat plates.Document6 pagesFinite element analysis is useful numerical technique to solve various structural problems. In this paper FEA model of slab column connection is model using ANSYS 16.0 . Punching shear failure is a major problem encountered in the design of reinforced concrete flat plates. The utilization of shear reinforcement via shear studs or other means has become a choice for improving the punching shear capacity .The obtained results indicate that, the proposed shear reinforcement system and drop panel has a positive effect in the enhancement of both the punching shear capacity and the strain energy of interior slab–column connection of both normal and high strength concrete. The general finite element software ANSYS can be used successfully to simulate the punching shearbehaviour of reinforced concrete flat plates.inventionjournalsNo ratings yet
- WB-Mech 120 Ch05 ModalDocument16 pagesWB-Mech 120 Ch05 ModalhebiyongNo ratings yet
- WB-Mech 120 WS 03.1Document13 pagesWB-Mech 120 WS 03.1Rene MartinezNo ratings yet
- AnsysDocument18 pagesAnsysmechanical engineering100% (12)
- Mech-Intro 14.0 WS03.1 2DGearsDocument17 pagesMech-Intro 14.0 WS03.1 2DGearsSilva Junior, E. J.No ratings yet
- Coupled Field AnalysisDocument12 pagesCoupled Field AnalysisAnonymous 5pwc6LxvHVNo ratings yet
- Introduction To ANSYS Mechanical: Workshop 7.1 Steady-State Thermal AnalysisDocument14 pagesIntroduction To ANSYS Mechanical: Workshop 7.1 Steady-State Thermal AnalysisAjay ChackoNo ratings yet
- Mech-Intro 13.0 WS03.1 ContactDocument13 pagesMech-Intro 13.0 WS03.1 ContactJym GensonNo ratings yet
- Mech BNL 14.0 L04-PlasticityDocument30 pagesMech BNL 14.0 L04-PlasticitycrisNo ratings yet
- Chicago Comprehensive Guide To Bolt Modeling in Ansys 15 0Document30 pagesChicago Comprehensive Guide To Bolt Modeling in Ansys 15 0Jesus Crhisty100% (1)
- WB-Mech 120 Ch04 Static PDFDocument49 pagesWB-Mech 120 Ch04 Static PDFGz2239No ratings yet
- Calculating and Displaying Fatigue ResultsDocument42 pagesCalculating and Displaying Fatigue ResultsBekirHanNo ratings yet
- Workbench - Simulation Basics: Workshop 2Document22 pagesWorkbench - Simulation Basics: Workshop 2siddhartha rajNo ratings yet
- Introduction To ANSYS Mechanical: Workshop 5.1 Linear Structural AnalysisDocument20 pagesIntroduction To ANSYS Mechanical: Workshop 5.1 Linear Structural AnalysisAjay Chacko100% (1)
- Mechanical Intro 17.0 M03 Structural Analysis PDFDocument49 pagesMechanical Intro 17.0 M03 Structural Analysis PDFFedericaNo ratings yet
- Introduction To ANSYS Mechanical: Workshop 8.1 Meshing EvaluationDocument19 pagesIntroduction To ANSYS Mechanical: Workshop 8.1 Meshing EvaluationAjay ChackoNo ratings yet
- Wb-Mech 120 NL Ws05bDocument16 pagesWb-Mech 120 NL Ws05bDiego FloresNo ratings yet
- Advanced Nonlinear Materials: Section 4Document116 pagesAdvanced Nonlinear Materials: Section 4hakan demirNo ratings yet
- WB-Mech 120 Ch07 BucklingDocument18 pagesWB-Mech 120 Ch07 BucklinghebiyongNo ratings yet
- Ansys Tutorial Forthe Torque Analysis of The Shaft Attached With Two DisksDocument13 pagesAnsys Tutorial Forthe Torque Analysis of The Shaft Attached With Two DisksPugazhenthi ThananjayanNo ratings yet
- CFX-FSI 14.5 Lect-05 Two Way Solving PostDocument42 pagesCFX-FSI 14.5 Lect-05 Two Way Solving PostShaheen S. RatnaniNo ratings yet
- Introduction To Workbench and CFX WorkflowDocument44 pagesIntroduction To Workbench and CFX WorkflowRaoni AmbrosioNo ratings yet
- APDL - Chapter 4 - APDL As A Macro Language (UP19980820)Document18 pagesAPDL - Chapter 4 - APDL As A Macro Language (UP19980820)Nam VoNo ratings yet
- Mesh-Intro 17.0 M05 Mesh Quality and Advanced TopicsDocument39 pagesMesh-Intro 17.0 M05 Mesh Quality and Advanced Topicsjust randomNo ratings yet
- 1301 ENME442 Lab8 Ansys PDFDocument22 pages1301 ENME442 Lab8 Ansys PDFhidaiNo ratings yet
- lecture04C-CFD - ICEM Mesh PDFDocument185 pageslecture04C-CFD - ICEM Mesh PDFkishoreNo ratings yet
- Mechanical-Nonlin 13.0 App5A ChabocheDocument27 pagesMechanical-Nonlin 13.0 App5A ChabocheShaheen S. RatnaniNo ratings yet
- Coupling and Constraint EquationsDocument19 pagesCoupling and Constraint EquationstripathijohnNo ratings yet
- Explicit Dynamics Chapter 9 Material Models PDFDocument54 pagesExplicit Dynamics Chapter 9 Material Models PDFSaiNo ratings yet
- 2041682-b (Bolt Modeling)Document22 pages2041682-b (Bolt Modeling)danaosajoNo ratings yet
- Patran 2010 Reference Manual Part 7: XY PlottingDocument72 pagesPatran 2010 Reference Manual Part 7: XY PlottingDonNo ratings yet
- Introduction To ANSYS Introduction To ANSYS Mechanical: WKH 9 1 Workshop 9.1 Parameter Management GDocument25 pagesIntroduction To ANSYS Introduction To ANSYS Mechanical: WKH 9 1 Workshop 9.1 Parameter Management GLuca De Barbieri BustamanteNo ratings yet
- DM-Intro 15.0 WS-4.1 DesignModeler ModelingDocument46 pagesDM-Intro 15.0 WS-4.1 DesignModeler ModelinghaziqNo ratings yet
- ANSYS Autodyn Users Manual 18.2Document506 pagesANSYS Autodyn Users Manual 18.2Panda HeroNo ratings yet
- Ask The Experts MPC ContactDocument15 pagesAsk The Experts MPC ContactShaheen S. RatnaniNo ratings yet
- Ask-The-experts ANSYS Advanced MeshingDocument47 pagesAsk-The-experts ANSYS Advanced MeshingShaheen S. RatnaniNo ratings yet
- Normal Mode Analysis of PlateDocument26 pagesNormal Mode Analysis of Plateselva1975No ratings yet
- RBE2Document20 pagesRBE2zakir78No ratings yet
- Random Vibration 845826Document22 pagesRandom Vibration 845826yash pradhanNo ratings yet
- Wb-Mech 120 NL Ws02bDocument23 pagesWb-Mech 120 NL Ws02bDiego FloresNo ratings yet
- WBv12.1 Emag Tutorial3 Busbars PDFDocument58 pagesWBv12.1 Emag Tutorial3 Busbars PDFAraz SNo ratings yet
- Ch3 Contact StiffnessDocument16 pagesCh3 Contact Stiffnessanilmavi100% (1)
- L07 ANSYS WB LS-DYNA - Element FormulationsDocument35 pagesL07 ANSYS WB LS-DYNA - Element FormulationsGonzalo AnzaldoNo ratings yet
- Cruciform Sections + NSCApril06 - TechDocument3 pagesCruciform Sections + NSCApril06 - TechIho1No ratings yet
- Mathematical Model For Wind Turbine BladesDocument12 pagesMathematical Model For Wind Turbine Bladeszahir abdallah EshagNo ratings yet
- Analysis of Shell StructureDocument37 pagesAnalysis of Shell StructureDave Mark AtendidoNo ratings yet
- Discussion - The Effective Length of Columns in Unbraced FramesDocument13 pagesDiscussion - The Effective Length of Columns in Unbraced Framesmeetvinayak2007No ratings yet
- Esdep WG 8Document19 pagesEsdep WG 8giuseppeNo ratings yet
- Intended Learning OutcomesDocument24 pagesIntended Learning OutcomesSteve BariaNo ratings yet
- Analytical Dynamics Chapter - 1Document69 pagesAnalytical Dynamics Chapter - 1TOLGA GüneşNo ratings yet
- Gimbal Lock Submitted VersionDocument29 pagesGimbal Lock Submitted Versionmuhamad otongNo ratings yet
- Stress in Rotating Disks and CylindersDocument34 pagesStress in Rotating Disks and CylindersMAXNo ratings yet
- Lecture On Columns Buckling PDFDocument24 pagesLecture On Columns Buckling PDFMd AmirulNo ratings yet
- A Baq Us ElementsDocument9 pagesA Baq Us Elementsmadhu77No ratings yet
- MODULO 5 Compression MembersDocument23 pagesMODULO 5 Compression Memberscarlomonsalve1No ratings yet
- Design Criteria For Steel Transmission PolesDocument25 pagesDesign Criteria For Steel Transmission PoleskunhalparikhNo ratings yet
- Analysis of Rotational Column With Plastic HingeDocument14 pagesAnalysis of Rotational Column With Plastic HingeRC Dela RocaNo ratings yet
- Stiffened Plates PDFDocument16 pagesStiffened Plates PDFfarhadmrt6923No ratings yet
- Mm326 System Dynamics Hw3 SolutionDocument7 pagesMm326 System Dynamics Hw3 SolutionOğulcan AytaçNo ratings yet
- E 1893 - 15Document27 pagesE 1893 - 15Eric GozzerNo ratings yet
- API Astm IP: Specific Gravity Gravity Density API APIDocument1 pageAPI Astm IP: Specific Gravity Gravity Density API APIمحمد مNo ratings yet
- DIN 18134 2012-04 Eng.Document25 pagesDIN 18134 2012-04 Eng.rolando rettigNo ratings yet
- Dowel Bar Calculation-06106Document164 pagesDowel Bar Calculation-06106Nguyễn Văn Ban100% (2)
- A Numerical Study of Some Aspects of The Spherical Charge Cratering TheoryDocument15 pagesA Numerical Study of Some Aspects of The Spherical Charge Cratering TheoryÁALNo ratings yet
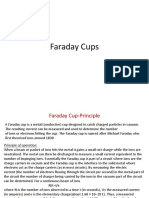
- Faraday CupsDocument10 pagesFaraday CupsAshish SharmaNo ratings yet
- TFlash OverviewDocument12 pagesTFlash OverviewDanialMdNoor0% (1)
- Measures of AssociationDocument10 pagesMeasures of AssociationmissinuNo ratings yet
- Solar ChartDocument36 pagesSolar ChartAvantika DhimanNo ratings yet
- Physics430 Lecture03Document21 pagesPhysics430 Lecture03chaciNo ratings yet
- Turning On A PivotDocument12 pagesTurning On A PivotMinahil WaqarNo ratings yet
- Analysis and Design of RC BeamDocument6 pagesAnalysis and Design of RC Beamakhilesh120No ratings yet
- Check List: Safety Relays Pnozclassic - PnozsigmaDocument33 pagesCheck List: Safety Relays Pnozclassic - PnozsigmafjcervantesNo ratings yet
- Wenya, Li .Numerical Simulation of Friction Welding Processes Based On ABAQUS EnvironmentDocument10 pagesWenya, Li .Numerical Simulation of Friction Welding Processes Based On ABAQUS EnvironmentRadinal Fernandez SimanjuntakNo ratings yet
- IEEEP CPD Transmission Grid CodeDocument130 pagesIEEEP CPD Transmission Grid CodeSalis Usman100% (1)
- Activity 20 - Adjustment of An Open Compass TraverseDocument9 pagesActivity 20 - Adjustment of An Open Compass TraverseJohn Angelo CompetenteNo ratings yet
- Application Modules With Demag Dedrive Compact: Complete Solutions For Travel and Lifting ApplicationsDocument2 pagesApplication Modules With Demag Dedrive Compact: Complete Solutions For Travel and Lifting ApplicationsAnonymous v1oFsM6igNo ratings yet
- Specification For Polymer Pin InsulatorDocument9 pagesSpecification For Polymer Pin InsulatorBinay PaudyalNo ratings yet
- Lesson Plan Center of GravityDocument1 pageLesson Plan Center of GravityDora AyeNo ratings yet
- Fenner-Dunlop Conveyor Problems & SolutionsDocument18 pagesFenner-Dunlop Conveyor Problems & Solutionsmickey262010No ratings yet
- Handbook of Lubrication and TribologyDocument1,139 pagesHandbook of Lubrication and Tribologydouglas100% (5)
- Struktur Baja 1Document33 pagesStruktur Baja 1Agung S NurcahyanaNo ratings yet
- Ee001a HW 2 - SolutionsDocument7 pagesEe001a HW 2 - SolutionsAllen NguyenNo ratings yet
- 0318 Gearsolutions PDFDocument68 pages0318 Gearsolutions PDFdesetekNo ratings yet
- 101.1 AlumAssoc EPD ColdRolled 20141016 0Document14 pages101.1 AlumAssoc EPD ColdRolled 20141016 0esivaks2000No ratings yet
- Pre Test Math7 - Q1Document3 pagesPre Test Math7 - Q1Michelle Jane Evangelista100% (2)
- Utility U (X, Y) (XY)Document8 pagesUtility U (X, Y) (XY)MadhunikaNo ratings yet
- Electromagnetic WavesDocument173 pagesElectromagnetic WavesTouseef AhmadNo ratings yet
- Knowledge Organiser Module 2.227543735Document3 pagesKnowledge Organiser Module 2.227543735armaanb617No ratings yet