You might also like
- On The Optimization of DAEs ProcessDocument14 pagesOn The Optimization of DAEs ProcessChristian RaineNo ratings yet
- Analysis - and - Comparison - of - Disti - Col - Models - ConsideringDocument6 pagesAnalysis - and - Comparison - of - Disti - Col - Models - ConsideringChristian RaineNo ratings yet
- Process Intensification, Transforming Chemical EngineeringDocument13 pagesProcess Intensification, Transforming Chemical EngineeringseelampremNo ratings yet
- Downs and Vogel, 1993Document11 pagesDowns and Vogel, 1993Rafael DouradoNo ratings yet
- Design and Simulation of Ethane Recovery Process in An Extractive DWCDocument8 pagesDesign and Simulation of Ethane Recovery Process in An Extractive DWCChristian RaineNo ratings yet
- Conversion of Sugars To Lactic Acid Derivatives Using Heterogeneous Zeotype CatalystsDocument5 pagesConversion of Sugars To Lactic Acid Derivatives Using Heterogeneous Zeotype CatalystsChristian RaineNo ratings yet
- Control Extract Distil Usin GlycerolDocument14 pagesControl Extract Distil Usin GlycerolChristian RaineNo ratings yet
- The - Solvent - Election Expert System For Azeotropic and Extractive DistillationDocument196 pagesThe - Solvent - Election Expert System For Azeotropic and Extractive DistillationChristian RaineNo ratings yet
- Conv - Propor Integral (PI) Control of DWC - TunningDocument12 pagesConv - Propor Integral (PI) Control of DWC - TunningChristian RaineNo ratings yet
- A - Natural Gas To Liquids Process Model For Optimal Operation PDFDocument9 pagesA - Natural Gas To Liquids Process Model For Optimal Operation PDFChristian RaineNo ratings yet
- Otto RedlichDocument11 pagesOtto RedlichChristian RaineNo ratings yet
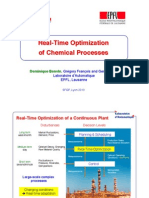
- DB SFGP 2013Document38 pagesDB SFGP 2013Christian RaineNo ratings yet
- TimeScaleSeparation& The Link Between Open-Loop and Closed-Loop DynamicsDocument6 pagesTimeScaleSeparation& The Link Between Open-Loop and Closed-Loop DynamicsChristian RaineNo ratings yet
- Combating Global WarmingDocument11 pagesCombating Global WarmingChristian RaineNo ratings yet
- Sustancias PurasDocument9 pagesSustancias PurasGluder Mamani PNo ratings yet
- New - Intensified - Distill@tion Systems For Qu@tern@ry Petlyuk ConfiguDocument6 pagesNew - Intensified - Distill@tion Systems For Qu@tern@ry Petlyuk ConfiguChristian RaineNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Very Short Answer QuestionsDocument3 pagesVery Short Answer QuestionsgopichandallakaNo ratings yet
- MIE210 Thermodynamics SyllabusDocument8 pagesMIE210 Thermodynamics SyllabusAshraful A. KhanNo ratings yet
- 1st Law of ThermodynamicsDocument95 pages1st Law of ThermodynamicsMARUMO_LEVYNo ratings yet
- Set 1BDocument12 pagesSet 1BKIER GASGANo ratings yet
- ElectronicDocument66 pagesElectronicdamith galagedaraNo ratings yet
- Fluid Mechanics-A.K. MohantyDocument548 pagesFluid Mechanics-A.K. MohantyMechpec Mech100% (1)
- III Year I Sem High Speed AerodynamicsDocument113 pagesIII Year I Sem High Speed AerodynamicsIron Mike VimalNo ratings yet
- Pressure Vs Enthalpy in Thermodynamics - Bell CurvesDocument3 pagesPressure Vs Enthalpy in Thermodynamics - Bell CurvesMahe MahendiranNo ratings yet
- First Law of Thermodynamics For A Control MassDocument51 pagesFirst Law of Thermodynamics For A Control MassTushyNo ratings yet
- ThermodynamicsDocument137 pagesThermodynamicsengineerNo ratings yet
- Energetics of Chemical ReactionsDocument24 pagesEnergetics of Chemical ReactionsFatehNo ratings yet
- SyllabusDocument29 pagesSyllabusRajmeet SinghNo ratings yet
- Thermodynamic PotentialsDocument22 pagesThermodynamic PotentialsShubham BansalNo ratings yet
- Fundamentals of Thermodynamics 10Th Edition Claus Borgnakke Full ChapterDocument51 pagesFundamentals of Thermodynamics 10Th Edition Claus Borgnakke Full Chaptergloria.toher494100% (12)
- Physical Chemistry I (100 Items)Document14 pagesPhysical Chemistry I (100 Items)Mark Ryan Tripole67% (3)
- Math Modeloing of Thermal Systems1Document9 pagesMath Modeloing of Thermal Systems1karim94No ratings yet
- Fundamentals HVACDocument183 pagesFundamentals HVACbookslover1No ratings yet
- MechDocument302 pagesMechnaveenNo ratings yet
- Etd 2mark With AnswerDocument16 pagesEtd 2mark With AnswertagoreboopathyNo ratings yet
- Chapter 1 IntroductionDocument9 pagesChapter 1 IntroductionNikko ManaleseNo ratings yet
- Time Table2013 PDFDocument55 pagesTime Table2013 PDFbalan dineshNo ratings yet
- Rubber Band Thermodynamics EssayDocument3 pagesRubber Band Thermodynamics Essayapi-249882353No ratings yet
- Part 1 Basic ConceptsDocument15 pagesPart 1 Basic ConceptsLJ NolfoNo ratings yet
- CyclePad Help SystemDocument97 pagesCyclePad Help SystemlakakakakakakakkakaNo ratings yet
- Week7 ME130-2Document11 pagesWeek7 ME130-2Deact AccountNo ratings yet
- Energy Conversion ProcessesDocument15 pagesEnergy Conversion Processesimamsakroni048No ratings yet
- Fundamentals of Heat Transfer - Lec NotesDocument179 pagesFundamentals of Heat Transfer - Lec NotesSitanshuPatil100% (1)
- Chapter 17 - Work, Heat, and The First Law of ThermodynamicsDocument42 pagesChapter 17 - Work, Heat, and The First Law of Thermodynamicsn4alpacaNo ratings yet
- Basic Thermodynamics Lecture Notes - 04 NptelDocument33 pagesBasic Thermodynamics Lecture Notes - 04 NptelKart01100% (2)
- Renewable Energy System: Simulation of Fuel Cell ForDocument30 pagesRenewable Energy System: Simulation of Fuel Cell ForVinayak KhandareNo ratings yet