You might also like
- Deepwater Sedimentary Systems: Science, Discovery, and ApplicationsFrom EverandDeepwater Sedimentary Systems: Science, Discovery, and ApplicationsJon R. RotzienNo ratings yet
- Pe20m017 Vikrantyadav Modelling and InversionDocument18 pagesPe20m017 Vikrantyadav Modelling and InversionNAGENDR_006No ratings yet
- Techniques and Methods of Seismic Data PDocument24 pagesTechniques and Methods of Seismic Data PtomislavNo ratings yet
- FB Tutorial Migration Imaging Conditions 141201Document11 pagesFB Tutorial Migration Imaging Conditions 141201Leonardo Octavio Olarte SánchezNo ratings yet
- Imaging Passive Seismic DataDocument11 pagesImaging Passive Seismic DataJaenudin ZenNo ratings yet
- Basic SeismicDocument40 pagesBasic Seismiczeze_13No ratings yet
- Lankston Refraction TR102Document55 pagesLankston Refraction TR102Harold G. Velasquez SanchezNo ratings yet
- Seismic Refraction Method Used in Mining ExplorationDocument7 pagesSeismic Refraction Method Used in Mining Explorationnilton100% (1)
- Seismic Methods: Refraction and ReflectionDocument39 pagesSeismic Methods: Refraction and ReflectionHecate MikuNo ratings yet
- Seismic Data Processing and InterpretationDocument15 pagesSeismic Data Processing and InterpretationmustafaNo ratings yet
- Introduction To FEMDocument8 pagesIntroduction To FEMChirag Ameta100% (1)
- Soil Mechanics PowerpointDocument239 pagesSoil Mechanics PowerpointEdcel Angelo TomasNo ratings yet
- Foundation Design: Presentation OutlineDocument31 pagesFoundation Design: Presentation Outlineconstruction managment100% (1)
- CMP Crossceoraltion - 1Document15 pagesCMP Crossceoraltion - 1waqarNo ratings yet
- Basic ProcessingDocument86 pagesBasic ProcessingRazi AbbasNo ratings yet
- Desinging of 3D Seismic Survey and Data Processing of Abu Amood Oil Field Southern of IraqDocument10 pagesDesinging of 3D Seismic Survey and Data Processing of Abu Amood Oil Field Southern of IraqIJAERS JOURNAL100% (1)
- EXPLORATION GEOPHYSICS FUNDAMENTALS OF SEISMIC METHODDocument66 pagesEXPLORATION GEOPHYSICS FUNDAMENTALS OF SEISMIC METHODFitria Thebest InYourlifeNo ratings yet
- Seismic Refraction Surveying: Infer Subsurface PropertiesDocument58 pagesSeismic Refraction Surveying: Infer Subsurface PropertiesMohammadFaisalQureshiNo ratings yet
- Elements of seismic surveyingDocument51 pagesElements of seismic surveyingShawki BsatNo ratings yet
- Seismic VibroseisDocument37 pagesSeismic VibroseisMithunNo ratings yet
- Useful Formulas in Seismic Survey DesignDocument2 pagesUseful Formulas in Seismic Survey DesignDanielNo ratings yet
- Ss Rel NotesDocument48 pagesSs Rel Notesahmed_497959294No ratings yet
- Detecting Faults and Fractures Using Spectral DecompositionDocument2 pagesDetecting Faults and Fractures Using Spectral Decompositionanima1982No ratings yet
- Geo2X Geneva Provides Geophysics ServicesDocument66 pagesGeo2X Geneva Provides Geophysics ServicesfrankytgNo ratings yet
- Understanding What Structural Engineering Is and Why It Is ImportantDocument2 pagesUnderstanding What Structural Engineering Is and Why It Is ImportantJackielou Marmojada DomaelNo ratings yet
- The Application of Ground Penetrating Radar (GPR) at Machu Picchu, PeruDocument2 pagesThe Application of Ground Penetrating Radar (GPR) at Machu Picchu, PeruMartin OviedoNo ratings yet
- Element of Civil Engg.Document15 pagesElement of Civil Engg.Roshan BudhaNo ratings yet
- Palmer.03.Digital Processing of Shallow Seismic Refraction Data PDFDocument23 pagesPalmer.03.Digital Processing of Shallow Seismic Refraction Data PDFAirNo ratings yet
- Introduction to Surveying ConceptsDocument97 pagesIntroduction to Surveying ConceptsBalaji BobbyNo ratings yet
- SiteinvestigationDocument56 pagesSiteinvestigationAbdul KabasyNo ratings yet
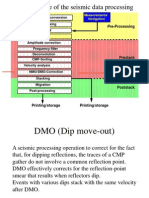
- Basic Scheme of The Seismic Data ProcessingDocument17 pagesBasic Scheme of The Seismic Data ProcessingEmma KokakuNo ratings yet
- Lecture 5 Seismic VelocitesDocument9 pagesLecture 5 Seismic VelocitesEzzadin BabanNo ratings yet
- Seismic InterpretationDocument24 pagesSeismic InterpretationNguyễnTrườngNo ratings yet
- Ss Sys AdminDocument65 pagesSs Sys Adminahmed_497959294No ratings yet
- What Is Seismic Interpretation? Alistair BrownDocument4 pagesWhat Is Seismic Interpretation? Alistair BrownElisa Maria Araujo GonzalezNo ratings yet
- Seismic instrumentation components and data acquisitionDocument37 pagesSeismic instrumentation components and data acquisitionNamwangala Rashid NatinduNo ratings yet
- Synthetic Seismogram PDFDocument3 pagesSynthetic Seismogram PDFOmar MohammedNo ratings yet
- Amplitude Variation With Frequency As Direct Hydrocarbon Indicator For Quick Look and Different Insight of Hydrocarbon DelineationDocument7 pagesAmplitude Variation With Frequency As Direct Hydrocarbon Indicator For Quick Look and Different Insight of Hydrocarbon DelineationAwalNo ratings yet
- Elastic Inversion Using Stack Seismic Data: Case Histories in ChinaDocument26 pagesElastic Inversion Using Stack Seismic Data: Case Histories in ChinaAdhita MeryantoNo ratings yet
- Applications of 3D Seismic Attribute Analysis in Hydrocarbon ProspectDocument15 pagesApplications of 3D Seismic Attribute Analysis in Hydrocarbon ProspectEmin YusifovNo ratings yet
- KINGDOM Glossary: NumericsDocument39 pagesKINGDOM Glossary: NumericsSarfraz KhanNo ratings yet
- Seismic ExplorDocument45 pagesSeismic Explorzeze_13No ratings yet
- Dynamic Bearing Capacity of Soils Under Earthquake LoadsDocument22 pagesDynamic Bearing Capacity of Soils Under Earthquake LoadsPeter MattewsNo ratings yet
- Petrophjysics To Well LogDocument4 pagesPetrophjysics To Well LogSando CrisiasaNo ratings yet
- Geophyiscs - NotesDocument13 pagesGeophyiscs - NotesHugo DuchovnyNo ratings yet
- Technical Note: Ardmore Field Extended Elastic Impedance StudyDocument22 pagesTechnical Note: Ardmore Field Extended Elastic Impedance StudyAz Rex100% (1)
- Refraction Seismic MethodDocument15 pagesRefraction Seismic MethodCamilleVegaNo ratings yet
- Full ThesisDocument180 pagesFull ThesissuhashNo ratings yet
- Release NotesDocument152 pagesRelease Notestesttest3846No ratings yet
- Electrical EngineeringDocument10 pagesElectrical Engineeringapi-302641464No ratings yet
- Air Entrainment in Manhole Drops-Paper - Final - ReviewedDocument8 pagesAir Entrainment in Manhole Drops-Paper - Final - ReviewedManuel SueroNo ratings yet
- Fundamental of Seismic Genap 2013-2014 TGDocument66 pagesFundamental of Seismic Genap 2013-2014 TGFandy MuhammadNo ratings yet
- Seismic Data Processing StepsDocument39 pagesSeismic Data Processing StepsMordekhaiNo ratings yet
- Ex - Gravity - HT09 - Exercises Gravity SurveyingDocument4 pagesEx - Gravity - HT09 - Exercises Gravity SurveyingShadi GarmaNo ratings yet
- Residual Oil Saturation: The Information You Should Know About SeismicDocument9 pagesResidual Oil Saturation: The Information You Should Know About SeismicOnur AkturkNo ratings yet
- Modeling The Earth For Oil Exploration: Final Report of the CEC's Geoscience I Program 1990-1993From EverandModeling The Earth For Oil Exploration: Final Report of the CEC's Geoscience I Program 1990-1993No ratings yet
- Seismic Migration: Imaging of Acoustic Energy by Wave Field ExtrapolationFrom EverandSeismic Migration: Imaging of Acoustic Energy by Wave Field ExtrapolationNo ratings yet
- Method Statement of Hybrid Seismic SurveyingDocument12 pagesMethod Statement of Hybrid Seismic SurveyingsomrupNo ratings yet
- Methodology of Seismic RefractionDocument8 pagesMethodology of Seismic Refractionelnaqa1760% (1)
- HiDocument1 pageHiAhmed Monir Al-Hossain EmonNo ratings yet
- OMNI 3D v12Document24 pagesOMNI 3D v12Christhofer Omar Urquizo QuirozNo ratings yet
- Palmer.02.Digital Processing of Shallow Seismic Refraction Data PDFDocument14 pagesPalmer.02.Digital Processing of Shallow Seismic Refraction Data PDFAirNo ratings yet
- Palmer.01.Digital Processing of Shallow Seismic Refraction Data PDFDocument9 pagesPalmer.01.Digital Processing of Shallow Seismic Refraction Data PDFAirNo ratings yet
- MY11 Corolla QRG LRDocument24 pagesMY11 Corolla QRG LRAhmed Monir Al-Hossain EmonNo ratings yet
- Seismic Data Processing and InterpretationDocument15 pagesSeismic Data Processing and InterpretationmustafaNo ratings yet
- MY11 Corolla QRG LRDocument24 pagesMY11 Corolla QRG LRAhmed Monir Al-Hossain EmonNo ratings yet
- Palmer.03.Digital Processing of Shallow Seismic Refraction Data PDFDocument23 pagesPalmer.03.Digital Processing of Shallow Seismic Refraction Data PDFAirNo ratings yet
- SeismicAcquisition (Ta3600)Document115 pagesSeismicAcquisition (Ta3600)wrosman@gmail.comNo ratings yet
- Ultra Shallow Seismic Reflection in Unconsolidated SedimentsDocument4 pagesUltra Shallow Seismic Reflection in Unconsolidated SedimentsAhmed Monir Al-Hossain EmonNo ratings yet
- What Is A Seismic Survey - PDFDocument2 pagesWhat Is A Seismic Survey - PDFAhmed Monir Al-Hossain EmonNo ratings yet
- Seismic Reflection Processing StepsDocument12 pagesSeismic Reflection Processing StepsAhmed Monir Al-Hossain EmonNo ratings yet
- Seismic Processing StepsDocument2 pagesSeismic Processing StepsUsman HanifNo ratings yet
- Frontier Seis RefractDocument1 pageFrontier Seis RefractAhmed Monir Al-Hossain EmonNo ratings yet
- 10 Tss Seismic RefractionDocument2 pages10 Tss Seismic RefractionAhmed Monir Al-Hossain EmonNo ratings yet
- Seismic Data Processing and InterpretationDocument15 pagesSeismic Data Processing and InterpretationmustafaNo ratings yet
- PS Wave GraphDocument26 pagesPS Wave GraphAna Cristina Castro-CayabyabNo ratings yet
- Geography f6Document4 pagesGeography f6Lun MakiNo ratings yet
- Processes 11 01824Document23 pagesProcesses 11 01824Abolfazl RezaeiNo ratings yet
- Time To Depth Conversion AnalysisDocument10 pagesTime To Depth Conversion AnalysisPromoservicios CANo ratings yet
- QuizDocument3 pagesQuizJoseph AparisNo ratings yet
- Geotourism in Ina PerspectiveDocument4 pagesGeotourism in Ina PerspectiveSyahrill Hidayat100% (1)
- GEOGRAPHY FORM 2 EXAM REVIEWDocument7 pagesGEOGRAPHY FORM 2 EXAM REVIEWRick CheruNo ratings yet
- Miocene to Recent echinoid genera and their first and last occurrencesDocument92 pagesMiocene to Recent echinoid genera and their first and last occurrenceschin dasNo ratings yet
- Melc 9 Stratification of RocksDocument26 pagesMelc 9 Stratification of Rockslost at seaNo ratings yet
- SEDIMENTOLOGY AND STRATIGRAPHY Gary Nichols-7-8Document2 pagesSEDIMENTOLOGY AND STRATIGRAPHY Gary Nichols-7-8RaquelChangNo ratings yet
- J.P. NavarroDocument2 pagesJ.P. NavarroCalitoo IGNo ratings yet
- 01 IFPTrainig - RCM - Sem1 - BookletDocument106 pages01 IFPTrainig - RCM - Sem1 - BookletMilah Lalla100% (2)
- Carbonate Sedimentology and Reef History, Canning BasinDocument2 pagesCarbonate Sedimentology and Reef History, Canning BasinHumaira MirzaNo ratings yet
- Grade and Tonnage Model For Tungsten Skarn Deposits - USGSDocument33 pagesGrade and Tonnage Model For Tungsten Skarn Deposits - USGSYoSoyElCarlosNo ratings yet
- Geology IN - Seismic Interpretation Basics PDFDocument3 pagesGeology IN - Seismic Interpretation Basics PDFpranowo_ibnuNo ratings yet
- Deumai Khola HEP Geological StudyDocument73 pagesDeumai Khola HEP Geological Study2003_335No ratings yet
- Science 10 Module 1.1Document34 pagesScience 10 Module 1.1marisNo ratings yet
- Earthquakes 2.0Document22 pagesEarthquakes 2.0Benjo FaustoNo ratings yet
- Science 10 Q1 Week 4Document11 pagesScience 10 Q1 Week 4Florence May L. GarciaNo ratings yet
- Intermidiate 1Document15 pagesIntermidiate 1Phạm Trung KiênNo ratings yet
- Press and Siever - Earth P413 OnwardsDocument13 pagesPress and Siever - Earth P413 OnwardsMike HuntNo ratings yet
- Topograph MapDocument21 pagesTopograph MapPrakash Kumar KumarNo ratings yet
- Physical Divisions of RajasthanDocument13 pagesPhysical Divisions of RajasthanNareshh SulenaNo ratings yet
- Metode Pelaksanaan Bangunan Bawah TanahDocument28 pagesMetode Pelaksanaan Bangunan Bawah TanahEfitZanifNo ratings yet
- Home-Based Laboratory Activity Science 10 Quarter 1 Week 8 Activity 3 Seafloor SpreadingDocument5 pagesHome-Based Laboratory Activity Science 10 Quarter 1 Week 8 Activity 3 Seafloor SpreadingMaria Elaiza CortesNo ratings yet
- Types of Volcanoes: Cinder Cone, Shield, Composite & DomeDocument2 pagesTypes of Volcanoes: Cinder Cone, Shield, Composite & DomejeffersonNo ratings yet
- Science 6 ExaminationsDocument21 pagesScience 6 ExaminationsLucille Gacutan AramburoNo ratings yet
- Soil Types in ChennaiDocument9 pagesSoil Types in ChennaiAyeesha ANo ratings yet
- Earthquake Hazards 101 - The Basics PDFDocument9 pagesEarthquake Hazards 101 - The Basics PDFIhab El AghouryNo ratings yet
- Types of Plate Boundaries PP - With Diagrams and ExamplesDocument23 pagesTypes of Plate Boundaries PP - With Diagrams and ExamplesMckRobNo ratings yet