You might also like
- ListeningPracticeThroughDictation 1 Transcripts PDFDocument10 pagesListeningPracticeThroughDictation 1 Transcripts PDFnhocNo ratings yet
- Shape Particle Filtering For Image SegmentationDocument8 pagesShape Particle Filtering For Image SegmentationnhocNo ratings yet
- Nerve SegmentationDocument9 pagesNerve SegmentationnhocNo ratings yet
- MatlabDocument26 pagesMatlabWinsweptNo ratings yet
- Main Gorban Kegl Wunsch ZinDocument44 pagesMain Gorban Kegl Wunsch ZinnhocNo ratings yet
- Local Symmetry Detection in Natural Images Using A Particle Filtering ApproachDocument14 pagesLocal Symmetry Detection in Natural Images Using A Particle Filtering ApproachnhocNo ratings yet
- Shape Particle Filtering For Image SegmentationDocument8 pagesShape Particle Filtering For Image SegmentationnhocNo ratings yet
- Image Segmentation by Shape Particle FilteringDocument4 pagesImage Segmentation by Shape Particle FilteringnhocNo ratings yet
- Contour Segmentation in 2D Ultrasound Medical Images With Particle Filtering PDFDocument11 pagesContour Segmentation in 2D Ultrasound Medical Images With Particle Filtering PDFnhocNo ratings yet
- Contour Segmentation in 2D Ultrasound Medical Images With Particle Filtering PDFDocument11 pagesContour Segmentation in 2D Ultrasound Medical Images With Particle Filtering PDFnhocNo ratings yet
- Neuromuscularfiber Segmentation Through Particlefiltering and Discrete Optimization PDFDocument10 pagesNeuromuscularfiber Segmentation Through Particlefiltering and Discrete Optimization PDFnhocNo ratings yet
- Pca TutorialDocument11 pagesPca TutorialpreethihpNo ratings yet
- Scholkopf Kernel PDFDocument6 pagesScholkopf Kernel PDFnhocNo ratings yet
- Lindsay I Smith - A Tutorial On Principal Components AnalysisDocument27 pagesLindsay I Smith - A Tutorial On Principal Components Analysisorestistsinalis100% (1)
- IDAPILecture 15Document6 pagesIDAPILecture 15MahadevNo ratings yet
- Pca in MatlabDocument2 pagesPca in Matlabsitaram_1No ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Exam 1 - Practice 2: C Harvard Math 21bDocument16 pagesExam 1 - Practice 2: C Harvard Math 21bEmily LiuNo ratings yet
- Paul Freiberger, Michael Swaine - Fire in The Valley - The Making of The Personal Computer (2000, McGraw-Hill Companies) PDFDocument529 pagesPaul Freiberger, Michael Swaine - Fire in The Valley - The Making of The Personal Computer (2000, McGraw-Hill Companies) PDFAl Zadid YusufNo ratings yet
- Interfacing Python To MysqlDocument20 pagesInterfacing Python To MysqlmalathiNo ratings yet
- Panel LCD LP101WH4-SLAA PDFDocument31 pagesPanel LCD LP101WH4-SLAA PDFflute musik1010No ratings yet
- Intelligent BuildingsDocument2 pagesIntelligent BuildingsBenjie LatrizNo ratings yet
- Python ExerciseDocument3 pagesPython Exerciseganduri narmadaNo ratings yet
- microPHAZIR User ManualDocument90 pagesmicroPHAZIR User ManualKeila QuevedoNo ratings yet
- Object-Oriented Modeling and Design With UML, 2nd EditionDocument501 pagesObject-Oriented Modeling and Design With UML, 2nd EditionUmar Jawad100% (1)
- Installer Preparation and Creating Bootable DevicesDocument17 pagesInstaller Preparation and Creating Bootable DevicesBenson Falco100% (4)
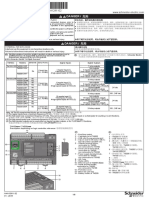
- M100 e M200 - Planilha de Instrução CLP SCHNEIDERDocument8 pagesM100 e M200 - Planilha de Instrução CLP SCHNEIDERjorge joãoNo ratings yet
- Anchor Bolt Design Example As Per Indian Code - Google SearchDocument2 pagesAnchor Bolt Design Example As Per Indian Code - Google Searchjebin_87No ratings yet
- Pythonic Data EntryDocument16 pagesPythonic Data EntrySakshi SonavaneNo ratings yet
- Huawei WDM OTN Product Family Site Maintenance (1) - V1.1 (A4 Version Brochure) PDFDocument6 pagesHuawei WDM OTN Product Family Site Maintenance (1) - V1.1 (A4 Version Brochure) PDFJosé LópezNo ratings yet
- Instruction Manual: HI144 T-LoggerDocument2 pagesInstruction Manual: HI144 T-LoggerJuan Guillermo Morales SaldarriagaNo ratings yet
- Tieng Anh 10 Friends Global - Unit 8 - Test 2Document8 pagesTieng Anh 10 Friends Global - Unit 8 - Test 2haminhpham1708No ratings yet
- Fresher Data Engineer - FPT Software - Pham-Huu-Vinh PDFDocument1 pageFresher Data Engineer - FPT Software - Pham-Huu-Vinh PDFvinhNo ratings yet
- Fusion TechnicalDocument544 pagesFusion TechnicalShilpa GurramNo ratings yet
- Cloud Adoption Framework For Azure: Alex Lee Brian BlanchardDocument37 pagesCloud Adoption Framework For Azure: Alex Lee Brian BlanchardabidouNo ratings yet
- Ey Hfs Top 10 Application Modernization Services 2022 Ey Excerpt PDFDocument36 pagesEy Hfs Top 10 Application Modernization Services 2022 Ey Excerpt PDFSowmya MuraliNo ratings yet
- Gcse Science Homework OnlineDocument4 pagesGcse Science Homework Onlinevxrtevhjf100% (1)
- Kami Export - 3Document5 pagesKami Export - 3api-411448305No ratings yet
- DriverEasy PCInfoDocument3 pagesDriverEasy PCInfoDiego GómezNo ratings yet
- Linux and Shell Programming Lab-1Document113 pagesLinux and Shell Programming Lab-1ABHIJITH DASNo ratings yet
- Application Security Posture Management: Secure Cloud-Native Applications at ScaleDocument27 pagesApplication Security Posture Management: Secure Cloud-Native Applications at ScaleVlad VikernesNo ratings yet
- CEA User Manual (NASA RP-1311) PDFDocument184 pagesCEA User Manual (NASA RP-1311) PDFAmer SmajkićNo ratings yet
- Raciocínio Clínico Aplicado À Estética Corporal - Dr. João Tassinary PDFDocument231 pagesRaciocínio Clínico Aplicado À Estética Corporal - Dr. João Tassinary PDFLaura Tomazelli100% (1)
- F15 Depron PDFDocument2 pagesF15 Depron PDFKarlieNo ratings yet
- STD511: C# Programming: Control Structures: RepetitionDocument13 pagesSTD511: C# Programming: Control Structures: RepetitionWilliamSStephenNo ratings yet
- Literature SurveyDocument2 pagesLiterature SurveyInder Pal SinghNo ratings yet
- Linux Foundation Certified Sysadmin (LFCS)Document9 pagesLinux Foundation Certified Sysadmin (LFCS)Sema AbayNo ratings yet