You might also like
- Swot E-CommerceDocument4 pagesSwot E-Commerceapi-253803128No ratings yet
- Fan 7314Document14 pagesFan 7314Kamal NonekNo ratings yet
- Application Note AN-6027: Design of Power Factor Correction Circuit Using FAN7530Document16 pagesApplication Note AN-6027: Design of Power Factor Correction Circuit Using FAN7530Malanie Sriya De SilvaNo ratings yet
- An 6026Document23 pagesAn 6026Иван АлексиевNo ratings yet
- CCFL Inverter IC OZ960Document12 pagesCCFL Inverter IC OZ960davesworkshopNo ratings yet
- Intelligent CCFL Inverter Controller: FeaturesDocument12 pagesIntelligent CCFL Inverter Controller: FeaturesMirosław DżumakNo ratings yet
- U708Document28 pagesU708Sol De GabrielNo ratings yet
- Ncl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsDocument10 pagesNcl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsKhúc Hành QuânNo ratings yet
- OZ960Document12 pagesOZ960Sergio Daniel BarretoNo ratings yet
- lx1692 PDFDocument15 pageslx1692 PDFvideosonNo ratings yet
- Aerosemi: Features ApplicationsDocument9 pagesAerosemi: Features Applicationsttnaing100% (1)
- ZXSC410 420Document12 pagesZXSC410 420Catalin TirtanNo ratings yet
- MP3389 r1.04Document16 pagesMP3389 r1.04Andres Alegria100% (1)
- Boost Converter Using The PIC16F753 Analog Features: Performance SpecificationsDocument9 pagesBoost Converter Using The PIC16F753 Analog Features: Performance SpecificationsSheik Ashiq AmeerNo ratings yet
- Single Ended Active Clamp/Reset PWM: Features DescriptionDocument16 pagesSingle Ended Active Clamp/Reset PWM: Features Descriptioncatsoithahuong84No ratings yet
- LM25005 42V, 2.5A Step-Down Switching Regulator: Literature Number: SNVS411BDocument24 pagesLM25005 42V, 2.5A Step-Down Switching Regulator: Literature Number: SNVS411BPravin MevadaNo ratings yet
- Description: Green-Power PWM Controller With Freq. JigglingDocument8 pagesDescription: Green-Power PWM Controller With Freq. JigglingLuis GuevaraNo ratings yet
- Iso122sensor de TensionDocument15 pagesIso122sensor de TensionRichard ZerpaNo ratings yet
- A 2918 SW Data SheetDocument8 pagesA 2918 SW Data SheetGustavo LunaNo ratings yet
- Application Note AN-1158: IRS2053M Functional DescriptionDocument41 pagesApplication Note AN-1158: IRS2053M Functional DescriptionlucaoslNo ratings yet
- Integrated Circuit Systems, IncDocument11 pagesIntegrated Circuit Systems, Incroger marqNo ratings yet
- DatasheetDocument13 pagesDatasheetkishore kumarNo ratings yet
- OB2269Document12 pagesOB2269Juan Ballon100% (1)
- AN-4102: Colour TV Receiver SMPSDocument16 pagesAN-4102: Colour TV Receiver SMPSshri.bhairavkar6977No ratings yet
- And8328 DDocument8 pagesAnd8328 DJonatan LunaNo ratings yet
- Silergy Corp SY8213FCC - C178246Document9 pagesSilergy Corp SY8213FCC - C178246Thai LamNo ratings yet
- Iraudamp 1Document22 pagesIraudamp 1luizcpimentaNo ratings yet
- Energy Metering Ic With Pulse Output: DescriptionDocument7 pagesEnergy Metering Ic With Pulse Output: DescriptionvungocduongNo ratings yet
- OZ9939GNDocument12 pagesOZ9939GNEduardo SierraNo ratings yet
- Uba2071 ADocument35 pagesUba2071 AKlaus PurkeNo ratings yet
- Iraudamp1 PDFDocument22 pagesIraudamp1 PDFamijoski6051No ratings yet
- Circuito Regulador de Voltaje Ob2216Document9 pagesCircuito Regulador de Voltaje Ob2216Wcarlos Ob RodriguezNo ratings yet
- Richtek RT7247ADocument15 pagesRichtek RT7247Ajhg-crackmeNo ratings yet
- Ir 1153Document20 pagesIr 1153ytnateNo ratings yet
- HV9971Document10 pagesHV9971Jazmin JorgeNo ratings yet
- High Efficiency Low-Side N-Channel Controller For Switching RegulatorsDocument33 pagesHigh Efficiency Low-Side N-Channel Controller For Switching Regulatorssoft4gsmNo ratings yet
- Fan 7316Document21 pagesFan 7316sontuyet82No ratings yet
- LCD Backlight Inverter Drive IC: Features DescriptionDocument14 pagesLCD Backlight Inverter Drive IC: Features DescriptionLuis Antonio Arévalo SifontesNo ratings yet
- Feature General Description: HT7A6005 Low Power, Wide Temperature Range General Purpose Current Mode PWM ControllerDocument11 pagesFeature General Description: HT7A6005 Low Power, Wide Temperature Range General Purpose Current Mode PWM ControllerEnéas BaroneNo ratings yet
- PLL For Digital Tuning System (DTS) : DescriptionDocument10 pagesPLL For Digital Tuning System (DTS) : DescriptionolimpioportilhoNo ratings yet
- EN5322QI: 2 A Voltage Mode Synchronous Buck PWM DC-DC Converter With Integrated InductorDocument16 pagesEN5322QI: 2 A Voltage Mode Synchronous Buck PWM DC-DC Converter With Integrated Inductorcatsoithahuong84No ratings yet
- NCP6153 - Data Sheet Rev0 - 08212011Document36 pagesNCP6153 - Data Sheet Rev0 - 08212011vladimyuNo ratings yet
- Ca 3524Document20 pagesCa 3524rmsharma1970No ratings yet
- Basic of DCDCDocument14 pagesBasic of DCDCAnil KoulNo ratings yet
- DM0265Document19 pagesDM0265liberthNo ratings yet
- Iraudamp1 - High Power Class D Audio Power Amplifier Using IR2011SDocument24 pagesIraudamp1 - High Power Class D Audio Power Amplifier Using IR2011SChuYurNo ratings yet
- FAN7930BDocument22 pagesFAN7930Bpagy snv100% (1)
- La 4108Document12 pagesLa 4108andrzej_w_k100% (3)
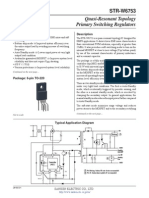
- STR W6753 DatasheetDocument8 pagesSTR W6753 DatasheetjgerabmNo ratings yet
- PWM ControllerDocument20 pagesPWM ControllerAmrit203No ratings yet
- High Voltage Resonant Controller: DescriptionDocument17 pagesHigh Voltage Resonant Controller: DescriptionJesus SilvaNo ratings yet
- FP 6321Document11 pagesFP 6321Ahmed HussainNo ratings yet
- L4972ADocument23 pagesL4972ARICHIHOTS2No ratings yet
- Design Guideline For Flyback Charger Using FAN302HL/ULDocument20 pagesDesign Guideline For Flyback Charger Using FAN302HL/ULteomondoNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- A622 INT69SU2 71000394 0-Ebook PDFDocument1 pageA622 INT69SU2 71000394 0-Ebook PDFMarco Tulio Da Silva100% (1)
- A622 INT69SU2 71000394 0-Ebook PDFDocument1 pageA622 INT69SU2 71000394 0-Ebook PDFMarco Tulio Da Silva100% (1)
- A253S80 INT69TM2 Diagnose 71000428 0-EbookDocument1 pageA253S80 INT69TM2 Diagnose 71000428 0-EbookMarco Tulio Da SilvaNo ratings yet
- Vu MeterDocument6 pagesVu MeterMarco Tulio Da SilvaNo ratings yet
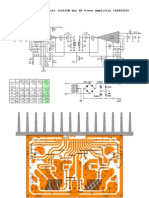
- Sample Application Circuit (2x120W Min AF Power Amplifier STK4241V)Document2 pagesSample Application Circuit (2x120W Min AF Power Amplifier STK4241V)Marco Tulio Da SilvaNo ratings yet
- Tda 7052Document8 pagesTda 7052trc_wmNo ratings yet
- Data Sheet: TDA1558QDocument11 pagesData Sheet: TDA1558QMarco Tulio Da SilvaNo ratings yet
- R1-070633 (Approved ReportWG1 #47)Document112 pagesR1-070633 (Approved ReportWG1 #47)DellNo ratings yet
- Development of Structural Analysis Program For Truss Structure Using MatlabDocument6 pagesDevelopment of Structural Analysis Program For Truss Structure Using Matlabkrishna vekariyaNo ratings yet
- 3 Consumer's Perception and Impact of PH On DetergentDocument11 pages3 Consumer's Perception and Impact of PH On DetergentMuhammad SaqlainNo ratings yet
- Design Planning For Large SoC Implementation at 40nm - Part 2Document13 pagesDesign Planning For Large SoC Implementation at 40nm - Part 2StudentNo ratings yet
- OpenScape 4000 V10 Cac Tap Lenh Quan Ly, Van Hanh, Bao DuongDocument2,955 pagesOpenScape 4000 V10 Cac Tap Lenh Quan Ly, Van Hanh, Bao Duongtam doNo ratings yet
- Presentation1 BEPDocument26 pagesPresentation1 BEPMohammed MakledNo ratings yet
- MCS-014 Block 2Document60 pagesMCS-014 Block 2Abhishek VeerkarNo ratings yet
- Crossbar Switch Interconnect Delay CalculationDocument17 pagesCrossbar Switch Interconnect Delay CalculationRENE CLIMACONo ratings yet
- Level Measurement Guide: Complete Level Solutions: Answers For IndustryDocument28 pagesLevel Measurement Guide: Complete Level Solutions: Answers For IndustryAndy FloresNo ratings yet
- Curriculum Handbook - Master in SonologyDocument29 pagesCurriculum Handbook - Master in SonologyMasha MitkovNo ratings yet
- Technical PDFDocument634 pagesTechnical PDFUlianov SinforosoNo ratings yet
- Understanding Design ThinkingDocument8 pagesUnderstanding Design ThinkingJorge Castro SanchezNo ratings yet
- RUCKUS ICX Switches in The DatacenterDocument3 pagesRUCKUS ICX Switches in The DatacenteralemnehNo ratings yet
- Customer Project Name Drawing No Revision No Order No Senkronizasyon Panosu-DSE8610-PERKINS-4012 E3-190509825 R00 4012840-10-30 KM CompanyDocument22 pagesCustomer Project Name Drawing No Revision No Order No Senkronizasyon Panosu-DSE8610-PERKINS-4012 E3-190509825 R00 4012840-10-30 KM CompanyHawzhin AbdulrahmanNo ratings yet
- Kelly KLS-H Brushless Motor Controller User's Manual: Devices SupportedDocument32 pagesKelly KLS-H Brushless Motor Controller User's Manual: Devices SupportedAbhishek Chaudhary100% (1)
- Safety, Reliability and Risk Analysis PDFDocument3,512 pagesSafety, Reliability and Risk Analysis PDFgilbertotiburcio100% (8)
- IP Radio Configuration - 09 Aug 2022Document11 pagesIP Radio Configuration - 09 Aug 2022Baby MurisNo ratings yet
- Manual Brosure CSG 120-2Document32 pagesManual Brosure CSG 120-2Louis TambunanNo ratings yet
- GenMath Week 1 - 051343Document61 pagesGenMath Week 1 - 051343Reymark VelascoNo ratings yet
- Chroma Vs Vijay SalesDocument27 pagesChroma Vs Vijay SalesRahul SoniNo ratings yet
- Mylecture TMS320C5x ArchitectureDocument63 pagesMylecture TMS320C5x ArchitectureGurjeet Singh67% (3)
- Verilog Code FAQDocument25 pagesVerilog Code FAQRAGUL RAJ SNo ratings yet
- Book LoRa LoRaWAN and Internet of ThingsDocument132 pagesBook LoRa LoRaWAN and Internet of ThingsShadowMageNo ratings yet
- Tuan Nguyen: Senior IT DirectorDocument3 pagesTuan Nguyen: Senior IT Directorkiran2710No ratings yet
- 04MA246EX Ran PDFDocument15 pages04MA246EX Ran PDFznchicago338No ratings yet
- Course Title:-Advanced Computer Networking Group Presentation On NFV FunctionalityDocument18 pagesCourse Title:-Advanced Computer Networking Group Presentation On NFV FunctionalityRoha CbcNo ratings yet
- DVR Model and Latest Version Firmware - Finding - Guide - 20211210Document22 pagesDVR Model and Latest Version Firmware - Finding - Guide - 20211210Angel Ochoa100% (1)
- Amar Regatti OBIEEDocument7 pagesAmar Regatti OBIEEharish2212No ratings yet
- BCSL-063 Operating System Concepts and Networking ManagementDocument90 pagesBCSL-063 Operating System Concepts and Networking Managementakash sharmaNo ratings yet