You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The 44 Phonemes of English Chart PDFDocument4 pagesThe 44 Phonemes of English Chart PDFArun Prasath100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- PDFDocument789 pagesPDFEric CnesNo ratings yet
- Programming For Computations - PythonDocument244 pagesProgramming For Computations - PythonMarcello CostaNo ratings yet
- Dynamic Pressure For Circular Silos Under Seismic ForceDocument10 pagesDynamic Pressure For Circular Silos Under Seismic Forcesebastian9033No ratings yet
- Response To Harmonic and Periodic ExcitationDocument102 pagesResponse To Harmonic and Periodic ExcitationAhmet TükenNo ratings yet
- Preventing Pulsation ProblemDocument10 pagesPreventing Pulsation Problemfathim1356No ratings yet
- Matveev Mechanics and Theory of RelativityDocument419 pagesMatveev Mechanics and Theory of Relativityegmont7100% (1)
- Test SokDocument14 pagesTest SokFirzan100% (5)
- Angle Between SubspacesDocument7 pagesAngle Between SubspacesFayazKhanPathanNo ratings yet
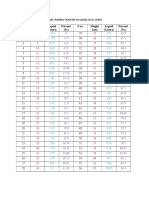
- S No. Height (CM) Liquid (Liters) Percent (%) S No. Height (CM) Liquid (Liters) Percent (%)Document2 pagesS No. Height (CM) Liquid (Liters) Percent (%) S No. Height (CM) Liquid (Liters) Percent (%)FayazKhanPathanNo ratings yet
- CHEP Hospitol ProcedureDocument2 pagesCHEP Hospitol ProcedureFayazKhanPathanNo ratings yet
- Gardner ThesisDocument128 pagesGardner ThesisFayazKhanPathanNo ratings yet
- Emily Dickinson To Susan GilbertDocument1 pageEmily Dickinson To Susan GilbertFayazKhanPathanNo ratings yet
- Raspberry Gpio: Available Online atDocument25 pagesRaspberry Gpio: Available Online atFayazKhanPathanNo ratings yet
- Discrete PID Controller: For Use in Robotics Project #3Document10 pagesDiscrete PID Controller: For Use in Robotics Project #3FayazKhanPathanNo ratings yet
- Matlab Fuzzy Toolbox TutorialDocument42 pagesMatlab Fuzzy Toolbox TutorialFayazKhanPathanNo ratings yet
- Bode Stability CriterionDocument1 pageBode Stability CriterionFayazKhanPathanNo ratings yet
- Singular Value Decomposition - MIT PDFDocument5 pagesSingular Value Decomposition - MIT PDFFayazKhanPathanNo ratings yet
- Solving The Radial Part of The Laplacian Equation Using The Method of FrobeniusDocument1 pageSolving The Radial Part of The Laplacian Equation Using The Method of FrobeniusFayazKhanPathanNo ratings yet
- EulerDocument2 pagesEulerFayazKhanPathanNo ratings yet
- Taulu JAP 05Document10 pagesTaulu JAP 05FayazKhanPathanNo ratings yet
- Undamped Free Vibration of Single Dof Systems: Dr.B.Santhosh Department of Mechanical EngineeringDocument3 pagesUndamped Free Vibration of Single Dof Systems: Dr.B.Santhosh Department of Mechanical EngineeringSREENATH S.SNo ratings yet
- Instrumentation and Process Control Sample ChaptersDocument18 pagesInstrumentation and Process Control Sample ChaptersGurunath EpiliNo ratings yet
- Airframe Structural Design (Asd)Document10 pagesAirframe Structural Design (Asd)Salim Omer Bamukra Al-MashjariNo ratings yet
- Physics Simple Harmonic MotionDocument3 pagesPhysics Simple Harmonic MotionAhmed AshikNo ratings yet
- KorfundDocument68 pagesKorfundnhy.mail2709100% (1)
- Simple Harmonic Motion and ElasticityDocument15 pagesSimple Harmonic Motion and ElasticitySubho BhattacharyaNo ratings yet
- Chapter 7 Mcqs OscillationsDocument5 pagesChapter 7 Mcqs Oscillationsleen praslaNo ratings yet
- at ResonantDocument10 pagesat ResonantAlhji AhmedNo ratings yet
- Worksheet On Oscillations 2022 (QP) - Final Version (With Cover Page)Document45 pagesWorksheet On Oscillations 2022 (QP) - Final Version (With Cover Page)Rafsun bin HossainNo ratings yet
- Alwitco Parts CatalogueDocument24 pagesAlwitco Parts CataloguemuppetscrapNo ratings yet
- Optimum Settings For Automatic Controllers (Ziegler and Nichols, 1942)Document7 pagesOptimum Settings For Automatic Controllers (Ziegler and Nichols, 1942)happy123324234234234100% (1)
- Chapter 1 Balancing of Rotating Masses: Sr. No. QuestionsDocument20 pagesChapter 1 Balancing of Rotating Masses: Sr. No. QuestionsKashyap ChauhanNo ratings yet
- Vibration Mechanisms and Controls of Long-Span Bridge - ReviewDocument21 pagesVibration Mechanisms and Controls of Long-Span Bridge - ReviewDionysius Siringoringo100% (1)
- Tutorial 1Document2 pagesTutorial 1Khushi BaghelNo ratings yet
- Control SystemDocument55 pagesControl SystemEr Rajdeep SahaNo ratings yet
- Chapter - 11 - Forced Vibration Single Degree of Freedom Systems PDFDocument19 pagesChapter - 11 - Forced Vibration Single Degree of Freedom Systems PDFfreddy kurniawanNo ratings yet
- Sheet IIIDocument4 pagesSheet IIISamir DaccacheNo ratings yet
- Born 1925 EngDocument30 pagesBorn 1925 EngFranz SchindlerNo ratings yet
- Tutorial Structural AcousticDocument31 pagesTutorial Structural Acousticaurora borealissNo ratings yet
- Mechanical Vibration 3Document12 pagesMechanical Vibration 3Abednego SiagianNo ratings yet
- 07 TDOF SystemDocument30 pages07 TDOF SystemSaroz ParajuliNo ratings yet
- Seismic Isolator and Their TypesDocument6 pagesSeismic Isolator and Their TypesHasan Asy' AryNo ratings yet