You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- 1401-0310-024-11 - Service Manual System Sophi and Sophi ADocument78 pages1401-0310-024-11 - Service Manual System Sophi and Sophi AJose PersiaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Sheraton HRM Case SolutionDocument64 pagesSheraton HRM Case SolutionMohammad Rafi100% (4)
- Physics Sample Paper 10 - 231221 - 091030Document19 pagesPhysics Sample Paper 10 - 231221 - 091030derexax756No ratings yet
- Narrative Report FS2 Deployment - MillanoDocument4 pagesNarrative Report FS2 Deployment - MillanoCelyn MillanoNo ratings yet
- Xslicer-SMX 160 KVDocument16 pagesXslicer-SMX 160 KVDoanh NguyenNo ratings yet
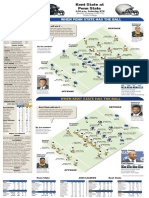
- Kent State at Penn StateDocument1 pageKent State at Penn StatedlevarseNo ratings yet
- WRD NotesDocument13 pagesWRD NotesRoy GichukiNo ratings yet
- Lecture 10: Power-Flow Studies: Instructor: Dr. Gleb V. Tcheslavski Contact: Office HoursDocument28 pagesLecture 10: Power-Flow Studies: Instructor: Dr. Gleb V. Tcheslavski Contact: Office HoursAn00pgadzillaNo ratings yet
- Algebraic Expressions: College AlgebraDocument8 pagesAlgebraic Expressions: College Algebragerwin dagumNo ratings yet
- Astm A888Document64 pagesAstm A888Nayan PatelNo ratings yet
- 08 Evidence PlanDocument2 pages08 Evidence PlanGlenn TotzNo ratings yet
- Lab Module Week 3 (Food Exchange List)Document2 pagesLab Module Week 3 (Food Exchange List)Tala StarsNo ratings yet
- Exam 220-1101 (Core 1)Document252 pagesExam 220-1101 (Core 1)Ahmed Baryal100% (1)
- Biology Lecture Notes: (Stemer'S Guide)Document28 pagesBiology Lecture Notes: (Stemer'S Guide)Magdy Mohamed Abdallah AbdelkaderNo ratings yet
- Communicating The Museum 2013 SlideshareDocument38 pagesCommunicating The Museum 2013 SlidesharehewhittyNo ratings yet
- EnglishDocument32 pagesEnglishVilitzaNo ratings yet
- Web-Based Procurement SystemDocument29 pagesWeb-Based Procurement SystemMish Lei Franxh100% (1)
- E384 Test Method For Microindentation Hardness of MaterialsDocument33 pagesE384 Test Method For Microindentation Hardness of MaterialssumherilNo ratings yet
- ME1202-Tutorial 2Document1 pageME1202-Tutorial 2manarajNo ratings yet
- 5e Irsii Infrared Sulfur AnalyzerDocument2 pages5e Irsii Infrared Sulfur AnalyzerNurul maghfiraNo ratings yet
- Sunrise SB9 Read OnlyDocument113 pagesSunrise SB9 Read OnlyAhmed SalahNo ratings yet
- K C Chakrabarty: Financial Inclusion and Banks - Issues and PerspectivesDocument9 pagesK C Chakrabarty: Financial Inclusion and Banks - Issues and PerspectivesAnamika Rai PandeyNo ratings yet
- A Study On Consumer's Perception Towards Honda Activa in Muzaffarpur CityDocument34 pagesA Study On Consumer's Perception Towards Honda Activa in Muzaffarpur CityabhaybittuNo ratings yet
- Escorted Tours: Europe - Central, Eastern & MediterraneanDocument52 pagesEscorted Tours: Europe - Central, Eastern & MediterraneanMomirNo ratings yet
- Contracted Vendor List $25,000.00+ (V4)Document3 pagesContracted Vendor List $25,000.00+ (V4)ABC10No ratings yet
- Computer Security MCQDocument12 pagesComputer Security MCQpinkudon089No ratings yet
- SapDocument15 pagesSapMauro AlessiNo ratings yet
- 821 Jogos PDFDocument18 pages821 Jogos PDForumauNo ratings yet
- EstimationDocument15 pagesEstimationnoor bashaNo ratings yet