You might also like
- Solution Manual For Engineering Fluid Mechanics 11th Ed - Donald F. Elger, Barbara A. LeBret, Clayton T. Crowe, John A. RobertsonDocument30 pagesSolution Manual For Engineering Fluid Mechanics 11th Ed - Donald F. Elger, Barbara A. LeBret, Clayton T. Crowe, John A. RobertsonAfshar Arabi0% (4)
- Outline For Informative SpeechDocument4 pagesOutline For Informative SpeechDaniella Sanchez78% (9)
- Solutions Manual Continuum Mechanics Lai 4th EdittionDocument246 pagesSolutions Manual Continuum Mechanics Lai 4th Edittiondiego_dave89% (18)
- Logan Applied Mathematics Solution ManualDocument63 pagesLogan Applied Mathematics Solution Manualjd24680100% (2)
- Kundu Fluid Mechanics 6th Edition Solution Manual PDFDocument40 pagesKundu Fluid Mechanics 6th Edition Solution Manual PDFDGIGDI50% (2)
- Fluid Mechanics 7th Edition White Solution ManualDocument116 pagesFluid Mechanics 7th Edition White Solution ManualALOKSRK50% (22)
- CQF Exam 3 Questions and GuideDocument8 pagesCQF Exam 3 Questions and GuideTerry Law100% (1)
- Elementary Fluid Mechanics - Vennard, John K. (John King)Document712 pagesElementary Fluid Mechanics - Vennard, John K. (John King)Aref Malkawi89% (9)
- Solution Manual For Engineering Fluid Mechanics 11th Edition by ElgerDocument61 pagesSolution Manual For Engineering Fluid Mechanics 11th Edition by Elger류재연No ratings yet
- Fluid Mechanics 4th Kundu, Ch1 SolutionDocument7 pagesFluid Mechanics 4th Kundu, Ch1 SolutionMin-hwan KimNo ratings yet
- Fluid Mechanics Worked Examples For EngineersDocument164 pagesFluid Mechanics Worked Examples For EngineersKarishma Juttun95% (38)
- SOLUTIONS MANUAL Fluid Mechanics For Eng PDFDocument613 pagesSOLUTIONS MANUAL Fluid Mechanics For Eng PDFyuki asunaNo ratings yet
- Lab1 Soln PDFDocument24 pagesLab1 Soln PDFJuan Carlos MerchanNo ratings yet
- CSM Chapters12 PDFDocument29 pagesCSM Chapters12 PDFClau AmaiiaNo ratings yet
- 21 CFR Part 11 Vs EU Annex 11 - Computer System ValidationDocument16 pages21 CFR Part 11 Vs EU Annex 11 - Computer System ValidationAnkit VaidyaNo ratings yet
- Numeri ChapraDocument182 pagesNumeri Chapraapi-1974819786% (7)
- Calculus of Variations PDFDocument15 pagesCalculus of Variations PDFManav Jhaveri100% (1)
- Numerical Solution of Black-Scholes EquationDocument8 pagesNumerical Solution of Black-Scholes EquationeshariffNo ratings yet
- Finite Differerence IntroDocument5 pagesFinite Differerence IntroFrancisco Rafael CerónNo ratings yet
- Math 233 - Exam II - Fall 2011Document32 pagesMath 233 - Exam II - Fall 2011Daniel Hawk KennedyNo ratings yet
- Poisson's Equation by The FEM Using A MATLAB Mesh Generator: 4u F U 0 On DDocument6 pagesPoisson's Equation by The FEM Using A MATLAB Mesh Generator: 4u F U 0 On DRuben Dario Guerrero ENo ratings yet
- Numerical Solution To PDEsDocument8 pagesNumerical Solution To PDEsZohaib AltafNo ratings yet
- CH 06Document52 pagesCH 06Ali AhmedNo ratings yet
- D Alembert SolutionDocument22 pagesD Alembert SolutionDharmendra Kumar0% (1)
- CFD Problem Solutions - Unsteady FlowsDocument8 pagesCFD Problem Solutions - Unsteady FlowsZakria ToorNo ratings yet
- EE3tp4 Exam 2014Document6 pagesEE3tp4 Exam 2014Chris AielloNo ratings yet
- Finite Differerence Temp 2DDocument6 pagesFinite Differerence Temp 2DOkan EryilmazNo ratings yet
- Partial Differential Equations 7.3 Hyperbolic Equations: 7.3-2 D'Alembert's MethodDocument9 pagesPartial Differential Equations 7.3 Hyperbolic Equations: 7.3-2 D'Alembert's Methodmasyuki1979No ratings yet
- Solutions Chapter 9Document34 pagesSolutions Chapter 9reloadedmemoryNo ratings yet
- KTH, DN2221, Computer Lab 2Document22 pagesKTH, DN2221, Computer Lab 2sebastianNo ratings yet
- Math F211 - Compre-QbDocument2 pagesMath F211 - Compre-Qbf20221235No ratings yet
- Techniques of IntegrationDocument61 pagesTechniques of IntegrationAma PredaNo ratings yet
- Chapter 05Document13 pagesChapter 05seanwu95No ratings yet
- Divide and Conquer StrategyDocument10 pagesDivide and Conquer Strategyadityabaid4No ratings yet
- HW7 SolDocument6 pagesHW7 Solmetmet476No ratings yet
- Analysis of Runge Kutta MethodDocument40 pagesAnalysis of Runge Kutta MethodAbdul RahimNo ratings yet
- Lesson 9Document3 pagesLesson 9Jimmy BroomfieldNo ratings yet
- MAE653 Sp10 Lesson06Document9 pagesMAE653 Sp10 Lesson06Edwin MachacaNo ratings yet
- Solutions To Exercises: Chapter 10: 10.1 Use The Chemical Potential of An Ideal Gas in (10.1.9) and Obtain The BarometricDocument6 pagesSolutions To Exercises: Chapter 10: 10.1 Use The Chemical Potential of An Ideal Gas in (10.1.9) and Obtain The BarometricSalomé TorresNo ratings yet
- General Forced Response: P T N B P T N A A T FDocument11 pagesGeneral Forced Response: P T N B P T N A A T FSathish Kumar SNo ratings yet
- 11 6 Paramtrc DiffrntiatnDocument7 pages11 6 Paramtrc DiffrntiatnEbookcrazeNo ratings yet
- Awesomebump V1.0: 1 Height To Normal ConversionDocument7 pagesAwesomebump V1.0: 1 Height To Normal ConversionAprian Rudina SukmaNo ratings yet
- IEOR 6711: Stochastic Models I Fall 2012, Professor Whitt SOLUTIONS To Homework Assignment 7Document4 pagesIEOR 6711: Stochastic Models I Fall 2012, Professor Whitt SOLUTIONS To Homework Assignment 7Songya PanNo ratings yet
- A First Course in Differential Equations Solutions Odd Exercises PDFDocument62 pagesA First Course in Differential Equations Solutions Odd Exercises PDFFernandoNo ratings yet
- Chapter 04Document32 pagesChapter 04Jawad HussainNo ratings yet
- Solutions Even ExercisesDocument28 pagesSolutions Even ExercisesKarl SchmidtNo ratings yet
- HW 9 SolutionsDocument7 pagesHW 9 SolutionsCody SageNo ratings yet
- Lyapunov Wolf CodeDocument4 pagesLyapunov Wolf CodeArkayan LahaNo ratings yet
- Solutions Image Processing Ulaby YagleDocument110 pagesSolutions Image Processing Ulaby YagleIrshadh Ibrahim0% (1)
- Midterm SolutionDocument6 pagesMidterm SolutionYu LindaNo ratings yet
- A Short Report On MATLAB Implementation of The Girsanov Transformation For Reliability AnalysisDocument8 pagesA Short Report On MATLAB Implementation of The Girsanov Transformation For Reliability AnalysisYoung EngineerNo ratings yet
- COMP4500 - 7500 - 2011, Sem 2Document8 pagesCOMP4500 - 7500 - 2011, Sem 2ekampreetNo ratings yet
- Fall 2007 Math 151 Common Exam 3B Tue, 27/nov/2007: InstructionsDocument10 pagesFall 2007 Math 151 Common Exam 3B Tue, 27/nov/2007: Instructionskaus9199No ratings yet
- Runge Kutta Lab With Pendulum ProblemDocument21 pagesRunge Kutta Lab With Pendulum ProblemJoshua CookNo ratings yet
- Quantum Mechanics I Solutions 6.: HintDocument12 pagesQuantum Mechanics I Solutions 6.: HintShweta SridharNo ratings yet
- Differentiation Under The Integral SignDocument18 pagesDifferentiation Under The Integral SignStephen RickmanNo ratings yet
- Finite Volume MethodDocument21 pagesFinite Volume MethodmekwonuNo ratings yet
- Introduction To MATLAB For Engineers, Third Edition: Numerical Methods For Calculus and Differential EquationsDocument47 pagesIntroduction To MATLAB For Engineers, Third Edition: Numerical Methods For Calculus and Differential EquationsSeyed SadeghNo ratings yet
- 1 Numerical Differentiation: Week Nine Python For ElectromagnetismDocument5 pages1 Numerical Differentiation: Week Nine Python For ElectromagnetismbbteenagerNo ratings yet
- Assignment 5 21122002Document7 pagesAssignment 5 21122002Aarav 127No ratings yet
- Guidelines For Public Participation in Spatial PlanningDocument34 pagesGuidelines For Public Participation in Spatial PlanningSadije DeliuNo ratings yet
- Ch01 - IntroductionDocument23 pagesCh01 - IntroductionRayzha1206No ratings yet
- AmiNet and AVN Configuration ManualDocument17 pagesAmiNet and AVN Configuration Manualskrab0fixNo ratings yet
- MFG Firmware Upgrade Instructions Rev.03Document2 pagesMFG Firmware Upgrade Instructions Rev.03Lc CzNo ratings yet
- 1011602-EI-2.0 Conexión PowerSwing SP33-MDocument1 page1011602-EI-2.0 Conexión PowerSwing SP33-Mdavidmontesgarci92No ratings yet
- Commissioner Wants To Work With Local Health Provider On Future ProjectDocument10 pagesCommissioner Wants To Work With Local Health Provider On Future ProjectMarcinho SavantNo ratings yet
- Criminal Law Chapter 1Document2 pagesCriminal Law Chapter 1abcyuiopNo ratings yet
- Everest Group Talent Availability For Auto Engineering ServicesDocument39 pagesEverest Group Talent Availability For Auto Engineering ServicesVivek SengarNo ratings yet
- DCP-Series User Manual 7.1 ADocument70 pagesDCP-Series User Manual 7.1 Aabu.taherNo ratings yet
- GeneralPhysics1 12 Q1 Mod1 Units-Physical-Quantities-MeasurementDocument25 pagesGeneralPhysics1 12 Q1 Mod1 Units-Physical-Quantities-MeasurementMeliodasNo ratings yet
- LACC-Campus-Map-Clausen Hall PDFDocument1 pageLACC-Campus-Map-Clausen Hall PDFhiroshimanoahNo ratings yet
- Consumption Tax On ImportationDocument27 pagesConsumption Tax On ImportationOwncoebdief100% (1)
- CFR 2014 Title49 Vol3Document681 pagesCFR 2014 Title49 Vol3Emi100% (1)
- Third Party OperationsDocument36 pagesThird Party OperationsKamaljit Kaur Sidhu0% (1)
- Introduction To Python ProgrammingDocument9 pagesIntroduction To Python ProgrammingAnilNo ratings yet
- Focus 3 Unit 3 Test Worksheet 3Document1 pageFocus 3 Unit 3 Test Worksheet 3dima.ostrolutskyNo ratings yet
- 24 Emergency DrugsDocument7 pages24 Emergency DrugsApple BelicanNo ratings yet
- SOCIAL ANALYSIS: Barangay Sampad, Cardona RizalDocument9 pagesSOCIAL ANALYSIS: Barangay Sampad, Cardona RizalJaime Ysabel I AlegreNo ratings yet
- Construction AccountingDocument12 pagesConstruction AccountingtezgajNo ratings yet
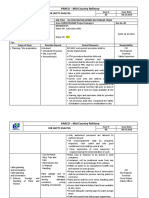
- PARCO - Mid Country Refinery: Job Safety AnalysisDocument6 pagesPARCO - Mid Country Refinery: Job Safety AnalysisGyanendra Narayan NayakNo ratings yet
- Submitted by Zully Conde DiazDocument6 pagesSubmitted by Zully Conde DiazzullyNo ratings yet
- CMU-CS 303 - Fundamentals of Computing 1 - 2020S - Lecture Slides - 6-1Document33 pagesCMU-CS 303 - Fundamentals of Computing 1 - 2020S - Lecture Slides - 6-1nguyenhuuhung2610dbNo ratings yet
- Cylinder Head 3126BDocument2 pagesCylinder Head 3126BGerardo VelazquezNo ratings yet
- QoS in The MPLS-DiffServ NetworkDocument4 pagesQoS in The MPLS-DiffServ Networkductdt09No ratings yet
- BBC Sky at Night (2017-09)Document110 pagesBBC Sky at Night (2017-09)georgetacaprarescuNo ratings yet
- CIVPRO: Asia's Emerging Dragon V DOTC Republic V CADocument3 pagesCIVPRO: Asia's Emerging Dragon V DOTC Republic V CAM50% (2)
- Genex Phu v200r005 Main Slides v1.0 (20111212)Document20 pagesGenex Phu v200r005 Main Slides v1.0 (20111212)Qǝɥɥɔ ʞɐɥlǝpqɐ67% (3)
- Ross12e Chapter30 TB AnswerkeyDocument57 pagesRoss12e Chapter30 TB AnswerkeyHà HoàngNo ratings yet