You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- An Introduction To Complex Function Theory: Bruce P. PalkaDocument8 pagesAn Introduction To Complex Function Theory: Bruce P. Palkazufa85No ratings yet
- HKIMO Heat Round 2019 Secondary 3Document6 pagesHKIMO Heat Round 2019 Secondary 3Karl Henry M. Dahao100% (1)
- QIP Brochure Advanced Textile Materials FinalDocument2 pagesQIP Brochure Advanced Textile Materials FinalswapnilNo ratings yet
- 1 s2.0 S1877705813020687 MainDocument6 pages1 s2.0 S1877705813020687 MainswapnilNo ratings yet
- Academic Calender Changes IAEC Meeting-14th September 2017Document1 pageAcademic Calender Changes IAEC Meeting-14th September 2017swapnilNo ratings yet
- ATSMDE BrochureDocument2 pagesATSMDE Brochureswapnil100% (1)
- Instructions For Making Payments To VJTI OnlineDocument1 pageInstructions For Making Payments To VJTI OnlineswapnilNo ratings yet
- New Girls Hostel Allotment Vacancy Position 2017-18 For First Year Btech Programmes Round IDocument2 pagesNew Girls Hostel Allotment Vacancy Position 2017-18 For First Year Btech Programmes Round IswapnilNo ratings yet
- Boys Hostel Admission Notice For Semester-III of Direct Second Year Diploma Programmes 2017-2018Document1 pageBoys Hostel Admission Notice For Semester-III of Direct Second Year Diploma Programmes 2017-2018swapnilNo ratings yet
- MTech Student IDs First Year 2017-18 Final ListDocument17 pagesMTech Student IDs First Year 2017-18 Final ListswapnilNo ratings yet
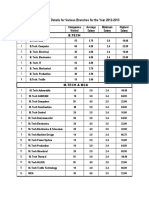
- Salary (In Lacs) Details For Various Branches For The Year 2012-2013Document2 pagesSalary (In Lacs) Details For Various Branches For The Year 2012-2013swapnilNo ratings yet
- Diploma Convocation-Students InvDocument1 pageDiploma Convocation-Students InvswapnilNo ratings yet
- Reporting Diploma FYDocument1 pageReporting Diploma FYswapnilNo ratings yet
- Direct Second Year Admission FeesDocument2 pagesDirect Second Year Admission FeesswapnilNo ratings yet
- EgreglongDocument140 pagesEgreglongAlon_RayNo ratings yet
- Basis of Number SystemDocument16 pagesBasis of Number SystemRohanNo ratings yet
- Class 10th Arihant Mathematics ExamplerDocument379 pagesClass 10th Arihant Mathematics ExamplerHarshit AgrawalNo ratings yet
- Reteaching 2-6Document2 pagesReteaching 2-6api-296726470No ratings yet
- Conforming and Non-Conforming ElementsDocument4 pagesConforming and Non-Conforming ElementsGourav Srusti0% (1)
- Differential Calculus Booster With Problems and Solutions For Iit Jee Main and Advanced Rejaul Makshud Mcgraw Hill Rejaul Makshud Full ChapterDocument52 pagesDifferential Calculus Booster With Problems and Solutions For Iit Jee Main and Advanced Rejaul Makshud Mcgraw Hill Rejaul Makshud Full Chapterscott.villalobos894100% (7)
- Calculus Self Taught Well Summarized Lecture Notes With Relevant Examples For BetterDocument31 pagesCalculus Self Taught Well Summarized Lecture Notes With Relevant Examples For BetterApril IngramNo ratings yet
- Mat112 - Chapter 1 - Review On AlgebraDocument16 pagesMat112 - Chapter 1 - Review On Algebrasafinah abdullahNo ratings yet
- Línea de Tiempo Ecuaciones Diferenciales - Es.en (Ingles)Document11 pagesLínea de Tiempo Ecuaciones Diferenciales - Es.en (Ingles)Sincero FrancoNo ratings yet
- Textbook Algebras and Representations Math 3193 2016 Alison Parker Ebook All Chapter PDFDocument53 pagesTextbook Algebras and Representations Math 3193 2016 Alison Parker Ebook All Chapter PDFbarry.smith728100% (20)
- Business MathDocument9 pagesBusiness MathCJ WATTPADNo ratings yet
- Vectors & Matrices: Dr. Safaa O. Al-MamoryDocument35 pagesVectors & Matrices: Dr. Safaa O. Al-MamoryAhmed Hussain100% (1)
- Solomon H QP - C1 EdexcelDocument4 pagesSolomon H QP - C1 Edexcelkhalil rehmanNo ratings yet
- MTE119 - Solutions Hw2Document9 pagesMTE119 - Solutions Hw2fabioNo ratings yet
- Write Comment To Make Your Programs Readable. Use Descriptive Variables in Your Programs (Name of The Variables Should Show Their Purposes)Document6 pagesWrite Comment To Make Your Programs Readable. Use Descriptive Variables in Your Programs (Name of The Variables Should Show Their Purposes)Shyam Ji RanaNo ratings yet
- Matemática PPT - PolynomialsDocument3 pagesMatemática PPT - Polynomials4gen_5No ratings yet
- AutoCAD Coordinate SystemsDocument2 pagesAutoCAD Coordinate SystemsAlyssa MadelNo ratings yet
- Review of Rings and Their HomomorphismsDocument2 pagesReview of Rings and Their Homomorphismsبلال كاظم شعواط هدهودNo ratings yet
- Walt: Wilf:: Recognise and Use Prime Numbers Find The Prime Factors of NumbersDocument7 pagesWalt: Wilf:: Recognise and Use Prime Numbers Find The Prime Factors of NumbersClaudia PinnaNo ratings yet
- Philippe Morel, From E-Factory To Ambient Factory Morel (GameSetMatchII TU Delft 2006)Document9 pagesPhilippe Morel, From E-Factory To Ambient Factory Morel (GameSetMatchII TU Delft 2006)Philippe Morel100% (1)
- Iit Maths - Straight Lines, Functions and Graphs and DifferentiationDocument65 pagesIit Maths - Straight Lines, Functions and Graphs and DifferentiationParas Thakur100% (4)
- Final Exam Formula SheetDocument3 pagesFinal Exam Formula SheetYuhao ChenNo ratings yet
- Parallelogram LawDocument4 pagesParallelogram LawJa KovNo ratings yet
- Reviewer in General MathematicsDocument3 pagesReviewer in General MathematicsClarisse MeiNo ratings yet
- DU MCA - 2018: 18, Zone-II, M.P. Nagar, Bhopal : 0755-4295319 - 1Document5 pagesDU MCA - 2018: 18, Zone-II, M.P. Nagar, Bhopal : 0755-4295319 - 1Soumik KarmakarNo ratings yet
- Hunger Ford Solution ManualDocument167 pagesHunger Ford Solution Manualmbardak75% (4)
- Inverse Trigonometry Theory - eDocument20 pagesInverse Trigonometry Theory - ethinkiitNo ratings yet
- Cs602 Quiz # 2Document5 pagesCs602 Quiz # 2Rohit SanwlaniNo ratings yet