You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Glover ISM 6e Chapter 07Document20 pagesGlover ISM 6e Chapter 07Sandeep AyyagariNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- CVX PDFDocument99 pagesCVX PDFeng_ahmed4444No ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- DC Power Flow EquationsDocument21 pagesDC Power Flow EquationsSandeep AyyagariNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Main SlidesDocument18 pagesMain SlidesSandeep AyyagariNo ratings yet
- Usefulness of DC Load Flows Over AC Load Flows: Krishna Sandeep Ayyagari January 2017Document5 pagesUsefulness of DC Load Flows Over AC Load Flows: Krishna Sandeep Ayyagari January 2017Sandeep AyyagariNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- ABB Energy Storage - Nov2012 PDFDocument12 pagesABB Energy Storage - Nov2012 PDFSandeep AyyagariNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- 2016 Altima PDFDocument480 pages2016 Altima PDFSandeep AyyagariNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Survey Quiz For EE 5693 F16Document1 pageSurvey Quiz For EE 5693 F16Sandeep AyyagariNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- UTSA 15-17 GraduateCatalogDocument336 pagesUTSA 15-17 GraduateCatalogSandeep AyyagariNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- EXAM 2 PRACTICE PROBLEMS PART 1 SOLUTIONSDocument40 pagesEXAM 2 PRACTICE PROBLEMS PART 1 SOLUTIONSDavidSuarezNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Part II Lecture Notes BDocument5 pagesPart II Lecture Notes BSandeep AyyagariNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- AC Load Flows/DC Load Flows: Sandeepayyagari January 2017Document4 pagesAC Load Flows/DC Load Flows: Sandeepayyagari January 2017Sandeep AyyagariNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The Art & Science of Protective Relaying - C. Russell Mason - GEDocument357 pagesThe Art & Science of Protective Relaying - C. Russell Mason - GEAasim MallickNo ratings yet
- Orientation Polarization DistributionDocument7 pagesOrientation Polarization DistributionrajiNo ratings yet
- Linear SystemsDocument17 pagesLinear SystemsSandeep AyyagariNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- SYHUANG Notes Losstangent PDFDocument2 pagesSYHUANG Notes Losstangent PDFSandeep AyyagariNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- PSA Notes Unit 5Document18 pagesPSA Notes Unit 5Sandeep AyyagariNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- PSA Notes Unit 3Document45 pagesPSA Notes Unit 3Sandeep AyyagariNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Stereographic Projection: Concept and ApplicationDocument10 pagesStereographic Projection: Concept and ApplicationJean-Paul MwambaNo ratings yet
- PSA Notes Unit 4Document39 pagesPSA Notes Unit 4Sandeep AyyagariNo ratings yet
- PSA Notes Unit 1Document34 pagesPSA Notes Unit 1Sandeep AyyagariNo ratings yet
- 1.per Unit System PDFDocument10 pages1.per Unit System PDFlaxman100% (1)
- EE5693 MatE5103 Fa16 Syllabus1Document4 pagesEE5693 MatE5103 Fa16 Syllabus1Sandeep AyyagariNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Lecture 8Document30 pagesLecture 8Sandeep AyyagariNo ratings yet
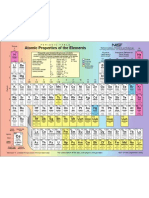
- Atomic Properties of The Elements TableDocument1 pageAtomic Properties of The Elements TableMaahiNo ratings yet
- PSA Notes Unit 2Document20 pagesPSA Notes Unit 2Sandeep AyyagariNo ratings yet
- Summary Description-Student Fees Fy1617Document1 pageSummary Description-Student Fees Fy1617Sandeep AyyagariNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Linear System Theory and Design - Chi-Tsong Chen PDFDocument176 pagesLinear System Theory and Design - Chi-Tsong Chen PDFNoureddine Guersi50% (2)
- (ELEC3114) Course - OutlineDocument11 pages(ELEC3114) Course - OutlinePeter HoNo ratings yet
- Cp5005 Software Quality Assurance and Testing C 3Document2 pagesCp5005 Software Quality Assurance and Testing C 3slogeshwariNo ratings yet
- Chapter 6 PIDDocument43 pagesChapter 6 PIDkibrom atsbhaNo ratings yet
- Political Sociology Work Book Day 1Document7 pagesPolitical Sociology Work Book Day 1Mithun VasanthaKumarNo ratings yet
- L8 MCQS Chapter-1Document13 pagesL8 MCQS Chapter-1niggsNo ratings yet
- FSM DesignDocument24 pagesFSM DesignNazim Ali100% (1)
- OverSampling AveragingDocument6 pagesOverSampling AveragingAleem AzharNo ratings yet
- Information System ASSIGNMENTDocument4 pagesInformation System ASSIGNMENTIbiaso AdajamesNo ratings yet
- BPM Business Process Mappng 1Document30 pagesBPM Business Process Mappng 1Mining Academy BSSNo ratings yet
- 2nd Law of Thermodynamics Group 1 NebresDocument35 pages2nd Law of Thermodynamics Group 1 NebresrbxwmnNo ratings yet
- Bapuji Institute of Engineering and Technology: Topic:-Artificial IntelligenceDocument12 pagesBapuji Institute of Engineering and Technology: Topic:-Artificial IntelligenceUmeshNo ratings yet
- Ai AssignmentDocument14 pagesAi Assignmenthammoudi.yousufNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Data Modeling and Database Design 2nd Edition Umanath Solutions Manual DownloadDocument16 pagesData Modeling and Database Design 2nd Edition Umanath Solutions Manual DownloadYvone Soto100% (22)
- NLP NctuDocument19 pagesNLP NctularasmoyoNo ratings yet
- 22me32 Etd Unit-Iv Problem SheetDocument2 pages22me32 Etd Unit-Iv Problem SheetU-36 Le0nelNo ratings yet
- 9A01708 Water Resources System Planning & ManagementDocument5 pages9A01708 Water Resources System Planning & ManagementsivabharathamurthyNo ratings yet
- Controller Design via Root Locus TechniquesDocument69 pagesController Design via Root Locus TechniquesMartin LuhutNo ratings yet
- DoD CDAO Data Quality Priorities and NeedsDocument11 pagesDoD CDAO Data Quality Priorities and NeedsjayNo ratings yet
- Master Test PlanDocument18 pagesMaster Test PlanMLastTryNo ratings yet
- Second LawDocument19 pagesSecond Law215492No ratings yet
- Use of IN-SPrint AutomationDocument38 pagesUse of IN-SPrint AutomationPavan Vasudevan100% (1)
- DR Lee Peng Hin: EE6203 Computer Control Systems 1 DR Lee Peng Hin: EE6203 Computer Control Systems 2Document38 pagesDR Lee Peng Hin: EE6203 Computer Control Systems 1 DR Lee Peng Hin: EE6203 Computer Control Systems 2phatctNo ratings yet
- (Sici) 1099-1727 (199723) 13 - 3 - 253 - Aid-Sdr129 - 3.0.co 2-h) James K. Doyle - The Cognitive Psychology of Systems Thinking PDFDocument13 pages(Sici) 1099-1727 (199723) 13 - 3 - 253 - Aid-Sdr129 - 3.0.co 2-h) James K. Doyle - The Cognitive Psychology of Systems Thinking PDFrodrigodel9331No ratings yet
- ScenariosDocument16 pagesScenariosAnuta CostinelNo ratings yet
- The Swing Up Control Problem For The AcrobotDocument7 pagesThe Swing Up Control Problem For The AcrobotJ.a. Tenshi ExecutionerNo ratings yet
- Software Quality Assurance: CIS 375 Bruce R. Maxim UM-DearbornDocument36 pagesSoftware Quality Assurance: CIS 375 Bruce R. Maxim UM-DearbornSabahat HussainNo ratings yet
- Robot KinematicDocument348 pagesRobot KinematicNGUYEN DUC NAMNo ratings yet
- Ibdp Physics Topic3 Thermal PhysicsDocument1 pageIbdp Physics Topic3 Thermal PhysicsTiberiuNo ratings yet
- Data Governance ScorecardDocument3 pagesData Governance ScorecardfransfilastapNo ratings yet
- Agile MethodologyDocument9 pagesAgile MethodologyJay Smith100% (1)