You might also like
- 1300EDI WIRING DIAGRAMS For Genset ApplicationsDocument6 pages1300EDI WIRING DIAGRAMS For Genset ApplicationsKhaled Kamel92% (63)
- QGL-CE-009 Design Guidelines For Road PavementDocument10 pagesQGL-CE-009 Design Guidelines For Road PavementMedhat ElhagrasyNo ratings yet
- IPU Pressure Equipment Directive Handbook 2017 02Document32 pagesIPU Pressure Equipment Directive Handbook 2017 02kanhuNo ratings yet
- AFP Full SCM 2019Document136 pagesAFP Full SCM 2019MokshitNo ratings yet
- RENK France New Powerpack 350SDocument2 pagesRENK France New Powerpack 350Sjunaid100% (1)
- Sensors and ActuatorsDocument109 pagesSensors and ActuatorsDr-Amit Kumar Singh100% (1)
- Andrew Catalog 38 2001.CV01Document769 pagesAndrew Catalog 38 2001.CV01Cf PaulNo ratings yet
- SensorsDocument132 pagesSensorsscorpionarnoldNo ratings yet
- Factory Planning ManualDocument421 pagesFactory Planning ManualAtakan Korkmazlar80% (5)
- ch3 - Sensor TechnologyDocument58 pagesch3 - Sensor TechnologyOla JamesNo ratings yet
- Lecture 7 - Sensors & TransducersDocument60 pagesLecture 7 - Sensors & TransducersSceva AquilaNo ratings yet
- Sensor OKDocument73 pagesSensor OKttNo ratings yet
- 4 Sensor Communication DesignDocument60 pages4 Sensor Communication DesignAdam AndualemNo ratings yet
- SensorsDocument27 pagesSensorslykarossele.nuestroNo ratings yet
- (123doc) - Cac-Loai-Cam-Bien-Thuong-DungDocument102 pages(123doc) - Cac-Loai-Cam-Bien-Thuong-Dungtu nguyenNo ratings yet
- Sensors UNIT III (Part 1) : CO3: Perform Simple Process Control ApplicationsDocument91 pagesSensors UNIT III (Part 1) : CO3: Perform Simple Process Control ApplicationsAzeem .kNo ratings yet
- Microwave ManualDocument35 pagesMicrowave ManualJhony VasquezNo ratings yet
- Transducer and SensorDocument92 pagesTransducer and SensorFemi PrinceNo ratings yet
- 06 Chapter+6 SensorsDocument92 pages06 Chapter+6 Sensorsபுருஷோத்தமன் ரவீந்திரன்No ratings yet
- Xee Oe1 Unit 3Document112 pagesXee Oe1 Unit 3Vigha Omnica IyerNo ratings yet
- Data Sheet - Provolt Dual Relay Multi-Tech Occupancy Sensor (O2C05 O2C10 O2C20-MDW)Document4 pagesData Sheet - Provolt Dual Relay Multi-Tech Occupancy Sensor (O2C05 O2C10 O2C20-MDW)Elkin Bautista RomeroNo ratings yet
- Nilkanth Solutions Welcomes All of You in 15 Days Online Internship On Arduino and SensorsDocument15 pagesNilkanth Solutions Welcomes All of You in 15 Days Online Internship On Arduino and SensorsGohil HardikNo ratings yet
- Capacitive Proximity SensorDocument45 pagesCapacitive Proximity SensorashleshNo ratings yet
- 2.1 Cảm biến sốDocument16 pages2.1 Cảm biến sốChí ThiệnNo ratings yet
- Partial Discharge Detection and Monitoring in SF6 SwitchgearDocument58 pagesPartial Discharge Detection and Monitoring in SF6 SwitchgearMaclaurinHeronNo ratings yet
- Osi-R-Ss and Osi-Ra-Ss: Conventional Single-Ended Reflective Imaging Beam Smoke DetectorDocument2 pagesOsi-R-Ss and Osi-Ra-Ss: Conventional Single-Ended Reflective Imaging Beam Smoke DetectorfedcortesNo ratings yet
- 45LMS-D8LGC2-D4: DIFF 10-30VDC LASER 0.2-15M LO/DO PNP/NPN 4-20ma DC-MICRO-4 Catalogue NoDocument2 pages45LMS-D8LGC2-D4: DIFF 10-30VDC LASER 0.2-15M LO/DO PNP/NPN 4-20ma DC-MICRO-4 Catalogue NosaulNo ratings yet
- Data Sheet-ODC PIR Occupancy SensorDocument4 pagesData Sheet-ODC PIR Occupancy SensorQUIÑONEZ CONSTRUCCIONES DE TIJUANA SA DE CVNo ratings yet
- Introduction To Instrumentation (Eeng4183) : by Tesfamichael ADocument24 pagesIntroduction To Instrumentation (Eeng4183) : by Tesfamichael ADagnachew AzeneNo ratings yet
- Lec5 Robot SensorsDocument6 pagesLec5 Robot SensorsIsuru Pasan DasanayakeNo ratings yet
- DJM3052 Industrial Electronic (UNIT 5) : SensorDocument22 pagesDJM3052 Industrial Electronic (UNIT 5) : SensorShazryl DanielNo ratings yet
- Robotics 6Document35 pagesRobotics 6nadiaNo ratings yet
- BCS WS CS DW 200Document2 pagesBCS WS CS DW 200GabrielGrecoNo ratings yet
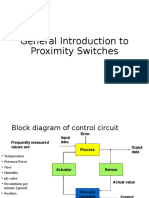
- Introduction To Proximity SwitchesDocument10 pagesIntroduction To Proximity SwitchesKrishna Chaitanya TNo ratings yet
- DN 61042Document2 pagesDN 61042Charmin CoronaNo ratings yet
- 2 Sensors and TransducersDocument83 pages2 Sensors and TransducersJEYAVEL PALANISAMYNo ratings yet
- Solid State SensorsDocument39 pagesSolid State SensorsRona Mae Raza RecaldeNo ratings yet
- Sensors NotesDocument4 pagesSensors Notesvijkrsna100% (2)
- Chave SensaguardDocument3 pagesChave SensaguardpelebotiniNo ratings yet
- HRT 96k - P 1631 800 47 - CatDocument84 pagesHRT 96k - P 1631 800 47 - Catشادي العزبيNo ratings yet
- Festo Sensor Brochure EN135218 202206Document20 pagesFesto Sensor Brochure EN135218 202206Ricardo RojasNo ratings yet
- Fiber Optic Sensing SolutionsDocument32 pagesFiber Optic Sensing SolutionsDjouNo ratings yet
- Installation Instructions 45LMS Laser Measurement Sensor: Important: Save These Instructions For Future UseDocument4 pagesInstallation Instructions 45LMS Laser Measurement Sensor: Important: Save These Instructions For Future UseDiauoliver RendersNo ratings yet
- E22 Series Selection Guide: Pushbuttons Selector Switches Indicating LightsDocument3 pagesE22 Series Selection Guide: Pushbuttons Selector Switches Indicating LightsAENo ratings yet
- Sensors and Actuators: Ioannis RekleitisDocument52 pagesSensors and Actuators: Ioannis RekleitisKajalNo ratings yet
- MSD Module 2Document98 pagesMSD Module 2arvind valentinoNo ratings yet
- DF 61043Document2 pagesDF 61043Angel Jorge LLopiz IbarraNo ratings yet
- Proximity SensorsDocument9 pagesProximity SensorsDimuthu Nuwan AbeysingheNo ratings yet
- Introduction To Industrial Electronics: Course AgendaDocument2 pagesIntroduction To Industrial Electronics: Course AgendaAwais khalidNo ratings yet
- 90294-1.04 Flyer mini-ATOSDocument2 pages90294-1.04 Flyer mini-ATOSRanderson MoraisNo ratings yet
- ABC's of UV Measurement and Process Control November 2012Document43 pagesABC's of UV Measurement and Process Control November 2012RLE2014No ratings yet
- DatasheetDocument2 pagesDatasheetnanodocl5099No ratings yet
- PD11502o I2CXL MaxSonar WR - DatasheetDocument23 pagesPD11502o I2CXL MaxSonar WR - DatasheetIT - 925 Silver JewelryNo ratings yet
- GREENLEE OTDR - DatasheetDocument4 pagesGREENLEE OTDR - DatasheetCovei GabrielNo ratings yet
- Balba, King Patrick V. ME-5202Document3 pagesBalba, King Patrick V. ME-5202King Patrick BalbaNo ratings yet
- Module 2Document61 pagesModule 2yashpalsingh80726No ratings yet
- Ramsey Microwave Point Level 8026 1114Document2 pagesRamsey Microwave Point Level 8026 1114Panner2009No ratings yet
- s470 Flexoptometer PhotometerDocument2 pagess470 Flexoptometer PhotometercikaracakNo ratings yet
- Class TwoDocument26 pagesClass TwoTemari futureNo ratings yet
- Continuous Level Measurement - Ultrasonic ControllersDocument8 pagesContinuous Level Measurement - Ultrasonic ControllersSaipavan ChanduNo ratings yet
- Fluke Hoja de Datos Multimetro Fluke 233 SolDocument3 pagesFluke Hoja de Datos Multimetro Fluke 233 SolKaren M.No ratings yet
- Unit 2 - Elements of AutomationDocument48 pagesUnit 2 - Elements of AutomationGautham BVNo ratings yet
- Two-Wire End-of-Line Programmable Hall-Effect Switch/Latch: Description Features and BenefitsDocument21 pagesTwo-Wire End-of-Line Programmable Hall-Effect Switch/Latch: Description Features and Benefitsmario230991No ratings yet
- Photo Voltaic CellDocument23 pagesPhoto Voltaic CellRakesh MohanachandranNo ratings yet
- GST-I-9105R Rayo LinelaDocument1 pageGST-I-9105R Rayo Linelamarcelo diazNo ratings yet
- Mahr Millimar 1240 Digital and Analog DisplayDocument1 pageMahr Millimar 1240 Digital and Analog DisplayVaibhav PawarNo ratings yet
- Color Gradient: 1 Axial GradientsDocument3 pagesColor Gradient: 1 Axial GradientsManuel MensaNo ratings yet
- Investigation of Chip-Tool Interface Temperature During Turning of Hardened AISI 4340 Alloy Steel Using Multi-Layer Coated Carbide InsertsDocument6 pagesInvestigation of Chip-Tool Interface Temperature During Turning of Hardened AISI 4340 Alloy Steel Using Multi-Layer Coated Carbide InsertsRenato NunesNo ratings yet
- Magcat ITS Data Sheet Update Oct. 2022 1.3b KHDocument2 pagesMagcat ITS Data Sheet Update Oct. 2022 1.3b KHkeshoooNo ratings yet
- Pricelist2014 PDFDocument7 pagesPricelist2014 PDFjay rickNo ratings yet
- Certificate: Lindab Ventilation AbDocument3 pagesCertificate: Lindab Ventilation AbDANNo ratings yet
- Esmeraldas Electrical Rehabilitation - RFP For Site Survey Engineering Feb 2014 v1 DraftDocument46 pagesEsmeraldas Electrical Rehabilitation - RFP For Site Survey Engineering Feb 2014 v1 DraftOmar GraterolNo ratings yet
- Affiliation ManualDocument29 pagesAffiliation ManualBaji Janjanam (CHANAKYA)No ratings yet
- E5255 HSBDocument8 pagesE5255 HSBSamad A BakarNo ratings yet
- Agregate ErmeticeDocument8 pagesAgregate ErmeticeRusu EugeniuNo ratings yet
- SMP125HDT2 Service ManualDocument26 pagesSMP125HDT2 Service ManualdanielNo ratings yet
- Procedure Guide For Bag Technique Part 1Document1 pageProcedure Guide For Bag Technique Part 1CrishaGarraNo ratings yet
- Ad90 PDFDocument4 pagesAd90 PDFMuhammad Eitch-BeeNo ratings yet
- Important Notice For Online VerificationDocument3 pagesImportant Notice For Online VerificationMithun GoudaNo ratings yet
- Monarch Learning GuideDocument425 pagesMonarch Learning Guideana4116No ratings yet
- Falchem Spec SUPER SOLDocument2 pagesFalchem Spec SUPER SOLUdana HettiarachchiNo ratings yet
- OSCACaseDocument2 pagesOSCACaseTES MARTINEZ50% (2)
- Geosynthetics India 2008 - J Thomas P TripthaiDocument5 pagesGeosynthetics India 2008 - J Thomas P TripthaiJimmy ThomasNo ratings yet
- Mitutoyo Vernier Caliper DetailsDocument1 pageMitutoyo Vernier Caliper Detailsraviteja036No ratings yet
- DF PDSDocument1 pageDF PDSCésar Alberto Cansino PérezNo ratings yet
- Effect of Cyclic Loading On Flexural Behaviour of FRP Strengthened RC Beams: A Stability Point ApproachDocument18 pagesEffect of Cyclic Loading On Flexural Behaviour of FRP Strengthened RC Beams: A Stability Point ApproachTam LamNo ratings yet
- It Despiece JBMDocument44 pagesIt Despiece JBMcessione attivitàNo ratings yet
- Iso 5356 1 2004Document11 pagesIso 5356 1 2004Katerin MartínezNo ratings yet
- Forged Steel Valves Gate, Globe, and Check: Asme Classes 150 - 4500 NPS - 4 (DN 8 - 100) API 602/ASME B16.34Document36 pagesForged Steel Valves Gate, Globe, and Check: Asme Classes 150 - 4500 NPS - 4 (DN 8 - 100) API 602/ASME B16.34Gourav SharmaNo ratings yet