You might also like
- Your Music + Our Passion: Blu-Ray Player User's Manual 2Document34 pagesYour Music + Our Passion: Blu-Ray Player User's Manual 2Teodule4PAMNo ratings yet
- 1 Addendum: Use Dual Screen Teletext Enlarge Teletext PagesDocument62 pages1 Addendum: Use Dual Screen Teletext Enlarge Teletext PagesTeodule4PAMNo ratings yet
- TCM Manual96518Document12 pagesTCM Manual96518Teodule4PAMNo ratings yet
- Setup Installation Instalación Installazione Instalação Installatie Asennus Installasjon InstalacjaDocument2 pagesSetup Installation Instalación Installazione Instalação Installatie Asennus Installasjon InstalacjaTeodule4PAMNo ratings yet
- LT6461 Lifetec Medion Liste CodesDocument10 pagesLT6461 Lifetec Medion Liste CodesTeodule4PAMNo ratings yet
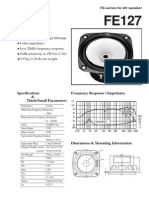
- Large Bandwidth Audio Speaker FOSTEX Datasheet Fe127Document1 pageLarge Bandwidth Audio Speaker FOSTEX Datasheet Fe127Teodule4PAMNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- XW60K GBDocument6 pagesXW60K GBsdsdNo ratings yet
- Manual Elite 64Document103 pagesManual Elite 64Enrique FlowersNo ratings yet
- USR-TCP232-304 User Manual Technical SupportDocument22 pagesUSR-TCP232-304 User Manual Technical SupportAmarjit BiswasNo ratings yet
- Universal Asynchronous Receiver/Transmitter: Ecen/Cs 224Document39 pagesUniversal Asynchronous Receiver/Transmitter: Ecen/Cs 224Kulbhushan KashyapNo ratings yet
- Matrix-516: Linux ARM9 Industry Box ComputerDocument27 pagesMatrix-516: Linux ARM9 Industry Box ComputerFebrianto HermawanNo ratings yet
- InterReach Unison DAS ManualDocument236 pagesInterReach Unison DAS ManualAlex CoronadoNo ratings yet
- Colorcert® Suite 3.5 User ManualDocument151 pagesColorcert® Suite 3.5 User ManualNguyễn Huy CườngNo ratings yet
- Übersetzungsmesskoffer TR-SPY Mark III Remote ManualDocument8 pagesÜbersetzungsmesskoffer TR-SPY Mark III Remote ManualDenis NamyslikNo ratings yet
- Technical Feature TM221Document22 pagesTechnical Feature TM221pradiptyaNo ratings yet
- TCP-IP LeanDocument534 pagesTCP-IP LeanChvackaNo ratings yet
- Minerva t2000 Fire SystemDocument49 pagesMinerva t2000 Fire SystemDan Dann100% (9)
- Micro ControllersDocument2 pagesMicro ControllersSuhil Shaik0% (1)
- VSPM UserManualDocument12 pagesVSPM UserManualAtiqur RahmanNo ratings yet
- NAVMAN GPS I Series Install (Ver 3.1.1) Ver1.02Document2 pagesNAVMAN GPS I Series Install (Ver 3.1.1) Ver1.02Dexter DanielNo ratings yet
- Agilent Technologies E5904B Option 300 Trace Port Analyzer For ARMDocument162 pagesAgilent Technologies E5904B Option 300 Trace Port Analyzer For ARMzzlazzNo ratings yet
- SEL-3010 Event Messenger: Features, Benefits, and ApplicationsDocument20 pagesSEL-3010 Event Messenger: Features, Benefits, and ApplicationsEmmanuel EntzanaNo ratings yet
- HCIA-Access V2.5 Lab Guide-محولDocument128 pagesHCIA-Access V2.5 Lab Guide-محولRabeeagwad Gwad100% (1)
- Gps ReceiverDocument22 pagesGps ReceiverPrasath CuriousCreative100% (1)
- Diagbootx: // Public Release 1Document4 pagesDiagbootx: // Public Release 1Tedy AdhinegoroNo ratings yet
- Ursalink UR71 Industrial Cellular Router DatasheetDocument6 pagesUrsalink UR71 Industrial Cellular Router DatasheetUrsalink MarketingNo ratings yet
- CH112-06 Libraries - RevBDocument45 pagesCH112-06 Libraries - RevBzvonkomihajlovic4891No ratings yet
- AIR Intelligence Manual 33 308100 004 RemoteDocument88 pagesAIR Intelligence Manual 33 308100 004 RemoteLeChancheNo ratings yet
- POWERJET Setup Manual ENG 2011Document37 pagesPOWERJET Setup Manual ENG 2011Davis Anthony Atauqui Loa0% (1)
- Skystar 360E 09 - 03Document4 pagesSkystar 360E 09 - 03jnax101No ratings yet
- Zigbee Based Remote Controlled Robot With Wireless VideoDocument15 pagesZigbee Based Remote Controlled Robot With Wireless VideoDixith VooraNo ratings yet
- Subsea Multiphase Flow MeterDocument16 pagesSubsea Multiphase Flow Metervpandya1981100% (1)
- GE Fanuc IC695NKT002: RX3i Ethernet NIU Kit With Two Ethernet Modules. IC695N IC695NK IC695NKTDocument13 pagesGE Fanuc IC695NKT002: RX3i Ethernet NIU Kit With Two Ethernet Modules. IC695N IC695NK IC695NKTColesha BarukaNo ratings yet
- Read MeDocument7 pagesRead MeMagdalena BujaraNo ratings yet
- Vamp 59: Line Differential Protection RelayDocument238 pagesVamp 59: Line Differential Protection RelayJagadheesh JagadheeshNo ratings yet
- 08m13e02 - Basic Measurement Training Workbook For The Instructor FARODocument236 pages08m13e02 - Basic Measurement Training Workbook For The Instructor FAROJuan Posada GNo ratings yet