You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Novel Mechanisms and Devices To Enable Successful Trans Dermal Drug DeliveryDocument14 pagesNovel Mechanisms and Devices To Enable Successful Trans Dermal Drug Deliveryapi-3750955100% (1)
- GATE Chemical Engineering 1992Document6 pagesGATE Chemical Engineering 1992Monu singhNo ratings yet
- Modeliranje Toplinkih Postupaka Dobijanja MagnezijaDocument322 pagesModeliranje Toplinkih Postupaka Dobijanja Magnezijaisus nazarecaninNo ratings yet
- Piezoelectric MaterialsDocument49 pagesPiezoelectric MaterialsSana AlzakiNo ratings yet
- Laser and Non Linear Optics by Imran AzizDocument68 pagesLaser and Non Linear Optics by Imran AzizDr.Imran Aziz33% (3)
- JEST Physics Full Solved Sample PaperDocument39 pagesJEST Physics Full Solved Sample Paperiswaleha100% (1)
- Me Gusta El VeranoDocument63 pagesMe Gusta El VeranoktfergusonNo ratings yet
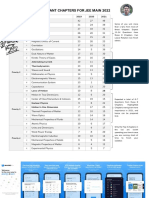
- Physics Most Important Chapters 2022Document2 pagesPhysics Most Important Chapters 2022VINOD JINo ratings yet
- Structural Geology Lab ManualDocument165 pagesStructural Geology Lab ManualSebastian CardonaNo ratings yet
- The Shapes of The OrbitalsDocument5 pagesThe Shapes of The OrbitalsBheim LlonaNo ratings yet
- Report On CondenserDocument5 pagesReport On CondenserDheeraj Shukla100% (1)
- Introductory Chemistry An Atoms First Approach 1st Edition Burdge Test BankDocument19 pagesIntroductory Chemistry An Atoms First Approach 1st Edition Burdge Test Bankduongvalerie9rkb3100% (32)
- Elektrisk (Katalog - Ermax)Document267 pagesElektrisk (Katalog - Ermax)ionel1987No ratings yet
- Chemistry Class XII Sample PaperDocument14 pagesChemistry Class XII Sample PaperAmit joshiNo ratings yet
- AE581 Project ReportDocument14 pagesAE581 Project ReportKağan İpekNo ratings yet
- ElectrostaticsDocument19 pagesElectrostaticsHarsh GuptaNo ratings yet
- Measurement of Radionuclides in Imported Coffee Consumed in Basra Southern of Iraq and Estimation of Its Annual Effective DoseDocument5 pagesMeasurement of Radionuclides in Imported Coffee Consumed in Basra Southern of Iraq and Estimation of Its Annual Effective DoseShivam SinghNo ratings yet
- Mass Transfer Is The Net Movement of Mass From One LocationDocument2 pagesMass Transfer Is The Net Movement of Mass From One LocationKishore RamNo ratings yet
- IGCSE Edexcel All Equations Physics TutorDocument1 pageIGCSE Edexcel All Equations Physics Tutorpramodini Jayalath100% (1)
- Chapter 4 - Pure BendingDocument33 pagesChapter 4 - Pure BendingAqil AfhamNo ratings yet
- Transition Metal 4Document4 pagesTransition Metal 4Sushant ShahNo ratings yet
- Topic 5 PAVEMENT DESIGNDocument71 pagesTopic 5 PAVEMENT DESIGNChin Tiong LeeNo ratings yet
- ChalmersDocument250 pagesChalmersRory Cristian Cordero RojoNo ratings yet
- Module 3 - Chemistry of The ElementsDocument35 pagesModule 3 - Chemistry of The Elementswaseem555No ratings yet
- Soil Mechanics PlatesDocument16 pagesSoil Mechanics PlatesMarc MathieuNo ratings yet
- CLASS 12 PRE BOARD PAPER PhysicsDocument13 pagesCLASS 12 PRE BOARD PAPER Physicsaditya singhNo ratings yet
- Lesson 2: Understanding The World of Thermodynamics: Module 1: Energy Chapter 1: FuelsDocument4 pagesLesson 2: Understanding The World of Thermodynamics: Module 1: Energy Chapter 1: Fuelscory kurdapyaNo ratings yet
- Gravitation Class 9 Science Notes - Sarthaks Econnect - Largest Online Education CommunityDocument12 pagesGravitation Class 9 Science Notes - Sarthaks Econnect - Largest Online Education Communitysmi_santhosh100% (1)
- Iweqhjhjhjjop, E9Uweeiowuweuhjqwhjwqhhwqjdhjwjkxja Sljxlassja Short-Circuit Design Forces in Power Lines and SubstationsDocument14 pagesIweqhjhjhjjop, E9Uweeiowuweuhjqwhjwqhhwqjdhjwjkxja Sljxlassja Short-Circuit Design Forces in Power Lines and Substationsamit77999No ratings yet