You might also like
- Conducting Effective Meetings WorkBookDocument36 pagesConducting Effective Meetings WorkBookCheri HoNo ratings yet
- IB SL P1 Math Book Exam-MateDocument375 pagesIB SL P1 Math Book Exam-MatePang Hua TanNo ratings yet
- AttentionDocument26 pagesAttentionKarn KunteNo ratings yet
- PREQ3-1 Shrouded VisionsDocument47 pagesPREQ3-1 Shrouded VisionsVelenar ShadowalkerNo ratings yet
- From Euclidean Geometry To Transformation GeometryDocument10 pagesFrom Euclidean Geometry To Transformation GeometryjoeybohoNo ratings yet
- Mathematical Analysis 1: theory and solved exercisesFrom EverandMathematical Analysis 1: theory and solved exercisesRating: 5 out of 5 stars5/5 (1)
- Linear Algebra and OdeDocument136 pagesLinear Algebra and OdezerdnaNo ratings yet
- CourseDocument102 pagesCourseIrtiza HussainNo ratings yet
- Vector Worksheet 2 PDFDocument18 pagesVector Worksheet 2 PDFJethro GarciaNo ratings yet
- Foundations of Mathematical Physics: Vectors, Tensors and Fields 2009 - 2010Document80 pagesFoundations of Mathematical Physics: Vectors, Tensors and Fields 2009 - 2010devkgunaNo ratings yet
- CalcIII EqnOfPlanesDocument5 pagesCalcIII EqnOfPlaneshendrawan707No ratings yet
- MITOCW - MITRES - 18-007 - Part1 - Lec2 - 300k.mp4: Herbert GrossDocument11 pagesMITOCW - MITRES - 18-007 - Part1 - Lec2 - 300k.mp4: Herbert Grossfrank_grimesNo ratings yet
- 03 Equilibrium of Concurrent Forces Force TableDocument6 pages03 Equilibrium of Concurrent Forces Force TableBenjie Catulin BuceNo ratings yet
- Lec 6Document20 pagesLec 6Elisée NdjabuNo ratings yet
- Lec 5Document19 pagesLec 5Rachna ChandraNo ratings yet
- Rota On Multilinear Algebra and GeometryDocument43 pagesRota On Multilinear Algebra and Geometryrasgrn7112No ratings yet
- Y9sa8stsx MDocument12 pagesY9sa8stsx Mfrank_grimesNo ratings yet
- Naumov Ip A Course of Mathematics Book2 Construction of CompDocument158 pagesNaumov Ip A Course of Mathematics Book2 Construction of CompStrahinja DonicNo ratings yet
- MITOCW - MITRES2 - 002s10linear - Lec06 - 300k-mp4: ProfessorDocument17 pagesMITOCW - MITRES2 - 002s10linear - Lec06 - 300k-mp4: ProfessorDanielNo ratings yet
- 6Document12 pages6VivekRouthNo ratings yet
- Lecture No-1 Introduction: ChangeDocument5 pagesLecture No-1 Introduction: ChangeumarNo ratings yet
- (379971718) Lec16Document24 pages(379971718) Lec16Diego EndaraNo ratings yet
- Tensors in Cartesian CoordinatesDocument24 pagesTensors in Cartesian Coordinatesnithree0% (1)
- Understanding Regression With Geometry - by Ravi Charan - MediumDocument20 pagesUnderstanding Regression With Geometry - by Ravi Charan - MediumOmar Enrique Garcia CaicedoNo ratings yet
- Physics SampleDocument3 pagesPhysics SampleSoham GhoshNo ratings yet
- Alm J. From Geometry To NumberDocument12 pagesAlm J. From Geometry To NumberMario PuppiNo ratings yet
- Chapter 4: Vectors, Matrices, and Linear AlgebraDocument11 pagesChapter 4: Vectors, Matrices, and Linear AlgebraRoki BullNo ratings yet
- MITOCW - 4. Movement of A Particle in Circular Motion W/ Polar CoordinatesDocument18 pagesMITOCW - 4. Movement of A Particle in Circular Motion W/ Polar CoordinatesRogerioNo ratings yet
- Linear Algebra IGNOUDocument326 pagesLinear Algebra IGNOUMontage Motion100% (1)
- VectorsDocument30 pagesVectorsTanjim IslamNo ratings yet
- Aerial Robotics Lecture 2A - 4 Axis-Angle Representations For RotationsDocument6 pagesAerial Robotics Lecture 2A - 4 Axis-Angle Representations For RotationsIain McCullochNo ratings yet
- Intro To Vector 1Document10 pagesIntro To Vector 1Elena ParconNo ratings yet
- Welcome To Calculus: 0.1 Preview of Calculus Contemporary Calculus 1Document6 pagesWelcome To Calculus: 0.1 Preview of Calculus Contemporary Calculus 1benalyn ignacioNo ratings yet
- Physics Notes VectorsDocument10 pagesPhysics Notes VectorsThaddeus LewisNo ratings yet
- 2 PointDocument66 pages2 PointChun Ting ChanNo ratings yet
- MITOCW - MITRES2 - 002s10linear - Lec08 - 300k-mp4: ProfessorDocument16 pagesMITOCW - MITRES2 - 002s10linear - Lec08 - 300k-mp4: ProfessorDanielNo ratings yet
- 21Document14 pages21VivekRouthNo ratings yet
- Lec2 PDFDocument32 pagesLec2 PDFBELAL ALSUBARINo ratings yet
- Unit IV: Introduction To Vector Analysis: Graphical MethodDocument7 pagesUnit IV: Introduction To Vector Analysis: Graphical MethodA.h. NugrahaNo ratings yet
- How Des Found The Area of A CircleDocument10 pagesHow Des Found The Area of A CircleRahayu RasliNo ratings yet
- Vectors and MatricesDocument10 pagesVectors and Matricesrenzon272No ratings yet
- Physics NotesDocument16 pagesPhysics NotesJunaid AnwerNo ratings yet
- Ch03 Physics For Scientists and EngineeringDocument43 pagesCh03 Physics For Scientists and Engineeringjohnb2bNo ratings yet
- Walter Lewin Notes 3Document6 pagesWalter Lewin Notes 3Romesor ApolNo ratings yet
- Resumen Video 1 - Análisis VectorialDocument4 pagesResumen Video 1 - Análisis VectorialSam VázquezNo ratings yet
- NAME:Kshitij Jha SUBJECT:Mathematics INDEX NO.:038Document31 pagesNAME:Kshitij Jha SUBJECT:Mathematics INDEX NO.:038Kshitij JhaNo ratings yet
- AnujaDocument29 pagesAnujaANUJA GEORGE100% (1)
- Chapter One - Lecture2Document11 pagesChapter One - Lecture2Arian SoleimanNo ratings yet
- Motion in A Plane PDFDocument24 pagesMotion in A Plane PDFsujit21in4376No ratings yet
- Degree Regular 1Document12 pagesDegree Regular 1Ajibade TaofikNo ratings yet
- Bar A Bash 11200518862Document4 pagesBar A Bash 11200518862Joe GreenNo ratings yet
- KKP Mte 3110 - 3Document56 pagesKKP Mte 3110 - 3Siti Khirnie KasbolahNo ratings yet
- 2016 Bachelor Franco de BardeciDocument26 pages2016 Bachelor Franco de BardecimickeyphyronNo ratings yet
- Fundamentals of DynamicsDocument20 pagesFundamentals of DynamicsSaurabh SkuniverseNo ratings yet
- Linear Algebra: Student Name: Jihad Hossain Jisan ID: 231016712 Section:05 Course Title: MATH 207Document23 pagesLinear Algebra: Student Name: Jihad Hossain Jisan ID: 231016712 Section:05 Course Title: MATH 207jihadhossain101No ratings yet
- A Three Five Kilograms Twenty-Two Degrees Celsius: Scalar QuantitiesDocument6 pagesA Three Five Kilograms Twenty-Two Degrees Celsius: Scalar QuantitiesDars- Limos SaludezNo ratings yet
- Projective Geometry: Nigel HitchinDocument22 pagesProjective Geometry: Nigel HitchinEmkafsNo ratings yet
- Keph 104Document24 pagesKeph 104Ninad PNo ratings yet
- Special Relativity in The Affine SpacetimeDocument8 pagesSpecial Relativity in The Affine SpacetimeMichael YuNo ratings yet
- CN W02D1 VectorsDocument21 pagesCN W02D1 VectorsJuan Carlos Morales ParraNo ratings yet
- VectorsDocument10 pagesVectorsNooh Shaikh100% (1)
- PIC18F46J50 ErrataDocument12 pagesPIC18F46J50 Erratafrank_grimesNo ratings yet
- Receptor Infrarrojo Tsop382Document7 pagesReceptor Infrarrojo Tsop382frank_grimesNo ratings yet
- PIC18F46J50Document562 pagesPIC18F46J50frank_grimesNo ratings yet
- Passing A Port Pin As An Argument To A Function - MPLAB XC8Document1 pagePassing A Port Pin As An Argument To A Function - MPLAB XC8frank_grimesNo ratings yet
- Accurate TMR0 InterruptsDocument6 pagesAccurate TMR0 Interruptsfrank_grimesNo ratings yet
- Lecture 1 - Manufacturing Process and Process ControlDocument8 pagesLecture 1 - Manufacturing Process and Process Controlfrank_grimesNo ratings yet
- 2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)Document3 pages2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)frank_grimesNo ratings yet
- How To Recalibrate A PICDocument3 pagesHow To Recalibrate A PICfrank_grimesNo ratings yet
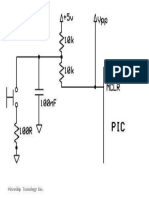
- MCLR Reset CircuitDocument1 pageMCLR Reset Circuitfrank_grimesNo ratings yet
- Garnet TutorialDocument42 pagesGarnet Tutorialfrank_grimesNo ratings yet
- MITOCW - MITRES - 18-007 - Part3 - Lec1 - 300k.mp4: Herbert GrossDocument13 pagesMITOCW - MITRES - 18-007 - Part3 - Lec1 - 300k.mp4: Herbert Grossfrank_grimesNo ratings yet
- MITOCW - MITRES - 18-007 - Part3 - Lec4 - 300k.mp4: Herbert GrossDocument15 pagesMITOCW - MITRES - 18-007 - Part3 - Lec4 - 300k.mp4: Herbert Grossfrank_grimesNo ratings yet
- Unit 6: Equations of Lines and Planes: Solutions Block 1:vector ArithmeticDocument27 pagesUnit 6: Equations of Lines and Planes: Solutions Block 1:vector Arithmeticfrank_grimesNo ratings yet
- Open Collector Outputs - Signet Sensors PDFDocument4 pagesOpen Collector Outputs - Signet Sensors PDFfrank_grimesNo ratings yet
- MITOCW - MITRES - 18-007 - Part3 - Lec3 - 300k.mp4: ProfessorDocument13 pagesMITOCW - MITRES - 18-007 - Part3 - Lec3 - 300k.mp4: Professorfrank_grimesNo ratings yet
- MITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: ProfessorDocument12 pagesMITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: Professorfrank_grimesNo ratings yet
- Structure: Study Guide Block 1:vector ArithmeticDocument6 pagesStructure: Study Guide Block 1:vector Arithmeticfrank_grimesNo ratings yet
- MITOCW - MITRES - 18-007 - Part3 - Lec2 - 300k.mp4: ProfessorDocument14 pagesMITOCW - MITRES - 18-007 - Part3 - Lec2 - 300k.mp4: Professorfrank_grimesNo ratings yet
- Y9sa8stsx MDocument12 pagesY9sa8stsx Mfrank_grimesNo ratings yet
- MITOCW - MITRES - 18-007 - Part2 - Lec1 - 300k.mp4: ProfessorDocument16 pagesMITOCW - MITRES - 18-007 - Part2 - Lec1 - 300k.mp4: Professorfrank_grimesNo ratings yet
- MITOCW - MITRES - 18-007 - Part1 - Lec1 - 300k.mp4: ProfessorDocument8 pagesMITOCW - MITRES - 18-007 - Part1 - Lec1 - 300k.mp4: Professorfrank_grimesNo ratings yet
- Times Interest Earned Ratio: Compare Interest Payments With Income Available To Pay ThemDocument13 pagesTimes Interest Earned Ratio: Compare Interest Payments With Income Available To Pay Themfrank_grimesNo ratings yet
- Class 12 Chemistry Project (Electochemistry)Document10 pagesClass 12 Chemistry Project (Electochemistry)Raghvendra Pandey0% (1)
- D457778-0460 Te Connectivity LTD Product Details: Part Number: Firstbom Part: Category: Manufacturer: ApplicationsDocument3 pagesD457778-0460 Te Connectivity LTD Product Details: Part Number: Firstbom Part: Category: Manufacturer: Applicationsfarhood ranjbarkhanghahNo ratings yet
- Vendor Document Cover SheetDocument11 pagesVendor Document Cover SheetSagar SawantNo ratings yet
- Spinel GemstoneDocument34 pagesSpinel GemstoneKen LamNo ratings yet
- R.K. Anand Contempt Delhi HC JudgementDocument112 pagesR.K. Anand Contempt Delhi HC JudgementSampath BulusuNo ratings yet
- Users of Accounting InformationDocument4 pagesUsers of Accounting InformationfharnizaparasanNo ratings yet
- Solid State Broadband High Power Amplifier: 1 - 30 MHZ / 50 WattsDocument3 pagesSolid State Broadband High Power Amplifier: 1 - 30 MHZ / 50 Wattskhanafzaal2576No ratings yet
- The Metal Oxide FETDocument7 pagesThe Metal Oxide FETSitty GuNo ratings yet
- T Shirt Design in Adobe Illustrator For Beginner To AdvancedDocument3 pagesT Shirt Design in Adobe Illustrator For Beginner To AdvancedAlejandro ZozorangaNo ratings yet
- E 1340 - 96 - Rteznda - PDFDocument12 pagesE 1340 - 96 - Rteznda - PDFsandeepNo ratings yet
- MaintGuideUSA PDFDocument118 pagesMaintGuideUSA PDFfotopredicNo ratings yet
- CV - Akhil AgarwalDocument2 pagesCV - Akhil AgarwalIshan SaxenaNo ratings yet
- Module II - Value Chain AnalysisDocument72 pagesModule II - Value Chain AnalysisloganathprasannaNo ratings yet
- VMGODocument3 pagesVMGOklirt carayoNo ratings yet
- Quiz 14Document2 pagesQuiz 14warning urgentNo ratings yet
- Example For Financial Statement AnalysisDocument2 pagesExample For Financial Statement AnalysisMobile Legends0% (1)
- Cable Subjected To Concentrated Loads CaDocument41 pagesCable Subjected To Concentrated Loads CaIcy MakerNo ratings yet
- h8183 Disaster Recovery Sphere Vmax SRDF Vplex WPDocument31 pagesh8183 Disaster Recovery Sphere Vmax SRDF Vplex WParvindNo ratings yet
- Formal Declarative EndingDocument13 pagesFormal Declarative EndingMary Mariette EscalanteNo ratings yet
- Major and Minor TriadsDocument16 pagesMajor and Minor TriadsSAYINo ratings yet
- Steel Rebar Sizes and Weights ChartsDocument2 pagesSteel Rebar Sizes and Weights ChartsNadiah Abdul RahamanNo ratings yet
- LKPD Bahasa Inggris Kelas VII - Descriptive TextDocument1 pageLKPD Bahasa Inggris Kelas VII - Descriptive TextAhmad Farel HusainNo ratings yet
- The Relationship Between International Innovation Collaboration, Intramural R&D and Smes' Innovation Performance: A Quantile Regression ApproachDocument6 pagesThe Relationship Between International Innovation Collaboration, Intramural R&D and Smes' Innovation Performance: A Quantile Regression ApproachSurya DhNo ratings yet
- Tutorial Collection SimpleDocument11 pagesTutorial Collection SimplerallupymeyraldoNo ratings yet
- Tugas 2.grammar Translation Exercises 03Document2 pagesTugas 2.grammar Translation Exercises 03Daffa SyahraniNo ratings yet
- Week 7Document14 pagesWeek 720331a1212No ratings yet