You might also like
- Vectors and Matrices ExplainedDocument10 pagesVectors and Matrices Explainedrenzon272No ratings yet
- Degree Regular 1Document12 pagesDegree Regular 1Ajibade TaofikNo ratings yet
- AnujaDocument29 pagesAnujaANUJA GEORGE100% (1)
- Introduction to Kinematics: Scalars, Vectors, and One Dimensional MotionDocument13 pagesIntroduction to Kinematics: Scalars, Vectors, and One Dimensional Motionbob n sauveNo ratings yet
- General Physics I Module 2 VectorsDocument16 pagesGeneral Physics I Module 2 Vectorsjerichogudito812No ratings yet
- Notes 1.4 - Vectors and ScalarsDocument12 pagesNotes 1.4 - Vectors and ScalarsBilly JenkinsNo ratings yet
- Tugas Alin - Transkrip Dan Translate - Hilda Sa'adahDocument6 pagesTugas Alin - Transkrip Dan Translate - Hilda Sa'adahKuyasaidah 22No ratings yet
- Module 1: A Crash Course in Vectors: Lecture 1: Scalar and Vector FieldsDocument56 pagesModule 1: A Crash Course in Vectors: Lecture 1: Scalar and Vector FieldsSayan Kumar KhanNo ratings yet
- Cal CV00 Dot Cross ProdDocument7 pagesCal CV00 Dot Cross ProdRamNo ratings yet
- Scalar and Vector Quantities ExplainedDocument8 pagesScalar and Vector Quantities ExplainedFahad SBNo ratings yet
- Notes 12Document22 pagesNotes 12Aqib Ali KhanNo ratings yet
- Vectors and ScalarsDocument22 pagesVectors and Scalarsakshat kothariNo ratings yet
- Engg PhysicsDocument335 pagesEngg PhysicsPrasanth MadhurapantulaNo ratings yet
- Lecture 14-Vectors 1Document23 pagesLecture 14-Vectors 1bananaNo ratings yet
- Lec 3Document9 pagesLec 3Hareesh PanakkalNo ratings yet
- Lec 3Document9 pagesLec 3tasleemNo ratings yet
- Me103 Linear Algebra: Dr. Orhan KekliciogluDocument17 pagesMe103 Linear Algebra: Dr. Orhan KekliciogluMert ToksipahiNo ratings yet
- Big Picture in Focus: Three DimensionsDocument12 pagesBig Picture in Focus: Three DimensionsAlvin GilayNo ratings yet
- Unit 1Document21 pagesUnit 1DeribaNo ratings yet
- Scalars and Vectors Fundamentals of Physics Halliday, Resnick & WalkerDocument16 pagesScalars and Vectors Fundamentals of Physics Halliday, Resnick & WalkerMina SamNo ratings yet
- Matrix Algebra For Beginners, Part II Linear Transformations, Eigenvectors and EigenvaluesDocument16 pagesMatrix Algebra For Beginners, Part II Linear Transformations, Eigenvectors and EigenvaluesPhine-hasNo ratings yet
- CourseDocument102 pagesCourseIrtiza HussainNo ratings yet
- Vector Addition Rules and Component MethodsDocument44 pagesVector Addition Rules and Component MethodsLee-Ann LimNo ratings yet
- Physics 11th Unit 2 KinematicsDocument31 pagesPhysics 11th Unit 2 Kinematicsvisiblemotivation7No ratings yet
- Example 1: Displacement, Velocity, Acceleration, Force Example 2Document2 pagesExample 1: Displacement, Velocity, Acceleration, Force Example 2Allen Jerry AriesNo ratings yet
- Introduction to Vectors: Magnitude, Direction and OperationsDocument6 pagesIntroduction to Vectors: Magnitude, Direction and OperationsDahanyakage WickramathungaNo ratings yet
- Dynamic Rigid BodiesDocument16 pagesDynamic Rigid BodiesHiraishin JutsuNo ratings yet
- SCI 2 - Physics for Engineers. Lesson 1 (1)Document57 pagesSCI 2 - Physics for Engineers. Lesson 1 (1)fortxtonly80No ratings yet
- Vectors and Scalars (Repaired)Document27 pagesVectors and Scalars (Repaired)maysara mohammadNo ratings yet
- An Introduction To VectorsDocument5 pagesAn Introduction To VectorsNasstasia EdwardsNo ratings yet
- Linear algebra explained: vectors, matrices, transformations, and applicationsDocument4 pagesLinear algebra explained: vectors, matrices, transformations, and applicationsRohit SahuNo ratings yet
- (1 Slide) Vectors (2 Slide)Document8 pages(1 Slide) Vectors (2 Slide)Alone in the lonely planetNo ratings yet
- VectorsDocument10 pagesVectorsblackmonkeyniqqaNo ratings yet
- Vectors: Vectors and Their ComponentsDocument22 pagesVectors: Vectors and Their ComponentsdrfefvdsfNo ratings yet
- Pssutc: Theme: The Scalar Product of Two Vectors. Work Done by A Varying ForceDocument15 pagesPssutc: Theme: The Scalar Product of Two Vectors. Work Done by A Varying ForceHayko SpitakciNo ratings yet
- EM Waves Basics of VectorsDocument24 pagesEM Waves Basics of VectorsDiego EndaraNo ratings yet
- Local Media3107175466723664843Document19 pagesLocal Media3107175466723664843Hamza A. MinantaraNo ratings yet
- VECTOR ALGEBRA NotesDocument23 pagesVECTOR ALGEBRA Notesyaashu0707No ratings yet
- Ch03 Physics For Scientists and EngineeringDocument43 pagesCh03 Physics For Scientists and Engineeringjohnb2bNo ratings yet
- MA129 Project: Area of Parallelogram and Triangle Using Vector AlgebraDocument31 pagesMA129 Project: Area of Parallelogram and Triangle Using Vector AlgebraKshitij JhaNo ratings yet
- PHYSICSexyDocument5 pagesPHYSICSexyjeloelydacumosNo ratings yet
- Orca Share Media1650888596522 6924328643949189140Document25 pagesOrca Share Media1650888596522 6924328643949189140CjeayNo ratings yet
- Chapter 01Document47 pagesChapter 01Ye NoNo ratings yet
- Vectors AB PDFDocument13 pagesVectors AB PDFMysterious gamerNo ratings yet
- Physics 3Document4 pagesPhysics 3Bernadette PitogoNo ratings yet
- VC-1 Vector Algebra and CalculusDocument28 pagesVC-1 Vector Algebra and CalculuseltyphysicsNo ratings yet
- Physics ProjectDocument12 pagesPhysics ProjectAditya SharmaNo ratings yet
- Lec 5Document19 pagesLec 5Rachna ChandraNo ratings yet
- IA Vectors and ScalarsDocument7 pagesIA Vectors and ScalarsClaire MNo ratings yet
- IIT JEE Physics Free Notes: Mechanics - Vectors and ScalarsDocument4 pagesIIT JEE Physics Free Notes: Mechanics - Vectors and ScalarsDr.Balakrishnan Kishore67% (3)
- CSS Physics 1 Notes Sample PaperDocument30 pagesCSS Physics 1 Notes Sample PaperM Faadi Malik100% (1)
- Equilibrium of Concurrent Forces (Force TableDocument6 pagesEquilibrium of Concurrent Forces (Force TableBenjie Catulin BuceNo ratings yet
- Vectors and 3-D GeometryDocument125 pagesVectors and 3-D Geometryapi-3728411100% (5)
- Parallelogram Law of VectorsDocument7 pagesParallelogram Law of VectorsdeezNo ratings yet
- Foundations of Mathematical Physics: Vectors, Tensors and FieldsDocument80 pagesFoundations of Mathematical Physics: Vectors, Tensors and FieldsdevkgunaNo ratings yet
- VectorsDocument12 pagesVectorsTweakxorNo ratings yet
- Dont Care ConditionsDocument5 pagesDont Care ConditionsRoki Bull100% (1)
- Linear Algebra and Vector CalculusDocument3 pagesLinear Algebra and Vector CalculusRoki BullNo ratings yet
- Chapter 4: Vectors, Matrices, and Linear AlgebraDocument11 pagesChapter 4: Vectors, Matrices, and Linear AlgebraRoki BullNo ratings yet
- Sherlock Holmes - The Emerald Crown (Dominoes) (Exercises) PDFDocument3 pagesSherlock Holmes - The Emerald Crown (Dominoes) (Exercises) PDFNafi Ul Kaysar63% (8)
- As 3583.6-1995 Methods of Test For Supplementary Cementitious Materials For Use With Portland Cement DeterminDocument2 pagesAs 3583.6-1995 Methods of Test For Supplementary Cementitious Materials For Use With Portland Cement DeterminSAI Global - APACNo ratings yet
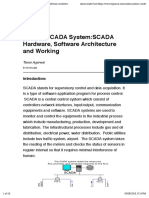
- What Is SCADA System-SCADA Hardware, Software Architecture and WorkingDocument10 pagesWhat Is SCADA System-SCADA Hardware, Software Architecture and WorkingMohd Ismail YusofNo ratings yet
- Gate Controller Manual: AAD03010 Frequency Control SystemDocument17 pagesGate Controller Manual: AAD03010 Frequency Control SystemKen LeeNo ratings yet
- CCL to Upload Download CNC Console Fanuc 6M/GN6Document2 pagesCCL to Upload Download CNC Console Fanuc 6M/GN6Zoran SpiroskiNo ratings yet
- Flow Program Bootcamp IT Consultant PT Indocyber Global TeknologiDocument12 pagesFlow Program Bootcamp IT Consultant PT Indocyber Global TeknologiTaufik RahmanNo ratings yet
- NCR HistoryDocument2 pagesNCR HistoryAgam SehgalNo ratings yet
- MTN Nigeria LoginDocument289 pagesMTN Nigeria Loginshekhar785424No ratings yet
- DAY 8 PROJECT INTEGRATION MANAGEMENTDocument22 pagesDAY 8 PROJECT INTEGRATION MANAGEMENTAlok SharmaNo ratings yet
- Advantages and Disadvantages of Using InstagramDocument2 pagesAdvantages and Disadvantages of Using InstagramJoefrey Pujadas BalumaNo ratings yet
- Jde 910 Accounts ReceivableDocument612 pagesJde 910 Accounts ReceivableazizirfanNo ratings yet
- Fro Programming GuideDocument9 pagesFro Programming GuideTeam 5401No ratings yet
- Drone Technology Explained: A Guide to UAV Components and ApplicationsDocument19 pagesDrone Technology Explained: A Guide to UAV Components and ApplicationsArvind KeesaraNo ratings yet
- Soapdoc2 PDFDocument197 pagesSoapdoc2 PDFCristian AndrioneNo ratings yet
- UPGRADEDocument2 pagesUPGRADEDhrisha GadaNo ratings yet
- Hreads: Program Counter: RegistersDocument21 pagesHreads: Program Counter: RegistersRao AtifNo ratings yet
- GOT1000 Startup Guide (GT10-FX)Document6 pagesGOT1000 Startup Guide (GT10-FX)Ajay ChoudharyNo ratings yet
- Tugas Grafika Komputer: Kurva C, Dragon, Dan SiepernzkiDocument7 pagesTugas Grafika Komputer: Kurva C, Dragon, Dan Siepernzkibagus_ari_pNo ratings yet
- Reroma STRUGGLES OF MARITIME STUDENTS ENROLLED TOC 1Document61 pagesReroma STRUGGLES OF MARITIME STUDENTS ENROLLED TOC 1Ningning RomarateNo ratings yet
- Articulacion HubnerDocument76 pagesArticulacion HubnerSergio Rincon100% (2)
- Cmyk 100 66 0 2: Mobile Radio User GuideDocument9 pagesCmyk 100 66 0 2: Mobile Radio User GuideMario Javier GonzalesNo ratings yet
- Analyzer: User ManualDocument50 pagesAnalyzer: User Manualyousra zeidanNo ratings yet
- C Data 2Document149 pagesC Data 2Abhijit BarmanNo ratings yet
- Phoenix SIL2 RelayDocument5 pagesPhoenix SIL2 Relaysteam100deg1658No ratings yet
- Schneider Electric LC1D95M7 DatasheetDocument3 pagesSchneider Electric LC1D95M7 DatasheetOmar GuillenNo ratings yet
- Module 1 Notes-1Document21 pagesModule 1 Notes-1adithik2002100% (1)
- Data Calls Check Gena Reset Uplink DownlinkDocument14 pagesData Calls Check Gena Reset Uplink DownlinkPradheep Renganathan100% (1)
- NVIDIA Quadro 4000 by PNYDocument1 pageNVIDIA Quadro 4000 by PNYPrues WongNo ratings yet
- Simulink Exercises For - Digital Communications - A Discrete-Time Approach, - by MDocument2 pagesSimulink Exercises For - Digital Communications - A Discrete-Time Approach, - by MbineshNo ratings yet
- Hackathon-PSP Server Integration and UsageDocument26 pagesHackathon-PSP Server Integration and Usageoptimium888No ratings yet
- The MIB Includes The System Information Transmitted On BCH. Signalling Radio Bearer: N/A Rlc-Sap: TM Logical Channel: BCCH Direction: Network To UEDocument5 pagesThe MIB Includes The System Information Transmitted On BCH. Signalling Radio Bearer: N/A Rlc-Sap: TM Logical Channel: BCCH Direction: Network To UESreenath VenkataNo ratings yet
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (79)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenFrom EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 4.5 out of 5 stars4.5/5 (20)
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceFrom EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceNo ratings yet
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)