SECTION 8
8.1
DESIGN FOR TORSION
8.1 General Background
8.1.1 Scope of Section 8
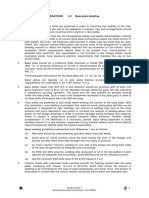
Section 8 gives a brief overview of design for torsion, to the extent needed
for typical design applications. This scope is mostly unchanged from that
covered in the previous edition of these design guides, however the
‘material herein is presented in limit state format for use in conjunction with
NZS 3404:1992 [8.1].
This section looks briefly at the two types of torsion, primary and secondary,
then at the design of commonly used structural sections to resist applied
torsion. It concludes with two design examples.
When the 1986 edition of these design guides was produced, the
NZS 3404 edition in use at that time did not cover design for torsion, The
current edition [8.1] still does not cover design for torsion in the Standard
[Part 1, 8.1a], however Commentary Clause C8.5 [8.1b] does present an
overview of this topic.
This section of the design guides is written for use in conjunction with
Commentary Clause C8.5 of (8.1b] and details of this interaction are given in
section 8.1.2.
The general background to design for torsion concludes, in section 8.1.3,
with a look at the difference between the treatment of primary and secondary
torsion in design.
8.1.2 Interface with NZS 3404:Part 2:¢8.5
Commentary Clause C8.5 of [8.1b] deals with the occurrence of pure torsion
and of combined bending and torsion. It briefly covers torsion actions,
analysis of member resistance to these actions and determination of member
capacity.
This section of the design guides amplifies the scope and content of
Commentary Clause C8.5 [8.1b]. The two sections are intended to be used
together and information in [8.1b] which is directly relevant to this section is
cross-referenced from herein, rather than repeated. This is especially
relevant to the diagrams and illustrations.
8.1.3 Primary and Secondary Torsion
Torsion may arise as a result of primary or secondary actions. The case of
primary torsion occurs when the external load has no alternative to being
resisted by torsion. In such situations, the torsion required to maintain static
equlliorium can be uniquely determined. This case may also be referred to as
equilibrium torsion. itis primarily a strength problem because the structure, or
{ts component, will collapse if the torsional resistance cannot be supplied.
The example shown in Fig. C8.5.2(2)(d) of NZS 3404:Part 2 is such an
example. In that case, the point load on cantilever member BC produces a
‘moment at point C which must be resisted by primary torsion within member
DE,
't, however, a support is placed at the end of the cantilever member shown in
that figure and the member is loaded within its span so as to again produce a
Moment at its connection to member DE, then secondary torsion is
Produced in member DE. This is the situation shown in Fig. C8.5.2(2)(a) of
[8.10]. In this instance, the member DE is not required to resist the torsion in
Order to maintain sub-assemblage stability, although it will be subject to an
imposed torsion, due to the required compatibility of deformations at the
joint between the two members DE and AC. This assemblage is statically
indeterminate and the torsion has arisen as a secondary action from the
8.2
8.2.4
8.2
requirements of continuity. A more common example is that shown in Fig.
C8.5.2(1) of [8.1b].
Disregard for secondary torsion due to compatibility of deformation
requirements in design may lead to minor overstressing in beams and
cracking of concrete in composite structures, but need not have more
serious consequences. It will not, typically, lower the ultimate strength of al
sub-assemblage. Secondary torsional effects are common in structural
systems; for example, in a rigid jointed structure, itis hardly possible to avoid
torsional effects arising from compatibility of deformations.
Designers usually intuitively neglect these secondary torsional effects.
When they are designing assemblages comprising thin-walled open
sections, they are supported in this approach by the very low torsional
stiffness of such sections (eg. I-sections, channel sections). This high
flexibility (the inverse of low stiffness) allows these members to undergo the
deformations due to secondary torsional effects without generating
significant internal torsional stresses.
This high flexibility becomes a disadvantage when primary torsion is to be
resisted, as unacceptably large deformations are likely to be generated by
relatively low design torsion. In this instance, a thin-walled closed cross
section should be used to resist the primary torsion, as such a section is very
torsionally stiff and efficient in its method of resisting the applied action (see
Fig. C8.5.3.1(c) of [8.1b)).
Torsion on Structural Sections
Introduction
Constant torque
‘ends free to wrap
The resistance of structural members to torsional loading may be considered
to be the sum of two components. When the rate of change of the angle of
twist is constant along the member (see Fig. 8.1(a) herein), itis in a state of
uniform torsion and the longitudinal warping deflections are also constant
along the member. In this case, the torque acting at any distance along the
member Is resisted by a set of shear stresses distributed around the cross
section. The ratio of the torque acting to the twist per unit length is defined
as the torsional rigidity, Gu, of the member (G = shear modulus of elasticity,
J = torsion constant).
‘The second component of the resistance to torsional loading may act when
the angle of twist varies along the member (see Figs. 8.1(b) and (c)), so that it
is ina state of non-uniform torsion. in this case, the warping deflections vary
along the member, and an additional set of stresses may act in conjunction
with those due to uniform torsion, to resist the applied torsion.
The stiffness of the member associated with these additional shear stresses
Proportional to the warping rigidity, Ely (E = Young's modulus of
elasticity, ly = warping constant)
‘Varying torque End warping prevented
Fig. 8.1
(a)
Uniform torsion
) c
Non-unitem torsion Non-uniteGyn torsion
Uniform and Non-Uniform Torsion on an I-Section Member (fram [8.2))
Uniform torsion applied to a member will not necessarily produce uniform
torsional stresses within the member. It will depend on the way in which the
83
member resists the applied torsion and on the support conditions. A good
description of the way in which different types of members resist torsion is
7 given in Commentary Clause C8.5.3 of [8.1b]. This behaviour is represented
mathematically by the flexural-torsional buckling constant, K, given by:
#°E\
Ks at (Eq. H4.3 of [8.14] or (8.1))
The effect of cross section on torsional behaviour is illustrated in Fig. 8.2.
Very thin walled
Closed Hot oted
sections orwelded
T oe Fetes humans
sections ee ns
Uniform j_Non-uniform _T°torsion
tol te ‘torsion
ost
zt
(Warping torque /total torque) at midspan
or t i
‘Trsion parameter Kstw2ET, /G/L2)
Fig. 8.2
Effect of Cross Section on Torsional Behaviour (from [8.2])
Most hot-rolled or welded I-sections resist applied torsion by a combination
of uniform and warping torsion and the beam is therefore in the general state
of non-uniform torsion. This corresponds to intermediate values of K, 2s
shown in Fig. 8.2. When K is high, then warping torsion predominates, such
as for very thin-walled open cross sections, where J is very low. When K is
low, then uniform torsion predominates, such as for thin-wallled closed cross
sections, where Jis very high.
Whether a member is in a state of uniform or non-uniform torsion also
depends on the loading arrangements and the warping restraints. If the
torque resisted is constant along the member and warping is unrestrained
(as in Fig. 8.1(a)), then the member will be In uniform torsion, even if the
torsional rigidity is very small. If, however, the torque resisted varies along the
length of the member (Fig. 8.1(b)), or if the warping displacements are
restrained in any way (Fig. 8.1(c)), the rate of change of the angle of twist will
vary, and the member will be in non-uniform torsion. In general, these
variations must be accounted for, but in some cases they can be ignored,
and the member analysed as if it were in uniform torsion. This is the case for
members of very low warping rigidity and for members of very high torsional
rigidity, for which the rate of change of the angle of twist varies only locally at
the points of applied torque and warping restraint. This simple method of
analysis usually leads to satisfactory predictions of the angles of twist, but
may underestimate the local stresses.
Structural members are, however, rarely used to resist torsion alone, and itis
much more common for torsion to occur in conjunction with bending and
other actions.
8.4
Anin-depth coverage of torsion effects on steel members is given by Trahair
and Bradford in [8.2]. This covers the elastic and inelastic internal actions
generated by applied torsion in much greater detail than that given herein.
8.2.2 Section Properties, Nominal Capacities and Design Deformation Limits
's of commonly used sections
In order to undertake a design for torsion, the torsion constant, J, and
warping constant, ly, for the oross section must be calculated. These are
given in manufacturer's section property tables, eg. [8.3, 8.4] and in
Published design tables, eg. [8.5]. The general formulae for ly and J, as
appropriate, for I-sections, channel sections and closed hollow sections are
given in Clause H4 of NZS 3404:Part 4 (8.1a].
Formulae for other cross sections are given in Table 21 of Formulas for
Stress and Strain {8.6}. (Note carefully the different notation used therein to
that given above and in NZS 3404).
8.2.2.2 Design for strength
In the strength design of steel members subject to torsion, consideration
must be given to both yielding and local buckling. The design of members
composed of stocky plate elements will be governed by yielding, while local
buckling may be important for more slender elements. Design limits for
ultimate limit state design are best given by stresses, due to the nature of
torsion resistance. These limits are given in Commentary Clause C8.5.5 of
[8.1b}.
Commentary Clause C8.5.5.1(a) comments that slender closed cross
sections may be subject to significant local distortions of the cross section
under uniform torsion. In such instances, the shear stress should be limited
to that given for the appropriate web slendemess from NZS 3404
Clause 5.11. This will involve converting the provisions of Clause 5.11 back
to a stress format, ie. for an unstiffened element of a closed cross section
with a slendemess ratio exceeding 82, the design uniform shear stress, zy",
should comply with equation 8.2.
wos 6 0y(0.6t,) (8.2)
where
ee 0.9
Gy = shear buckling coefficient, given by Clause 5.1.5.1 of [8.14]
For very slender elements, a more detailed analysis for local buckling effects
should be made. This is only likely to occur in box girder design, where
specialist design guidance is available, eg. (reference (5.25) from (8.1b)].
Commentary Clause 08.5.5.2 of (8.1b] gives guidance for combining the
effects of coincident normal stresses due to bending and warping torsion or
the effects of coincident shear stresses from bending and uniform torsion.
This requires a knowledge of where, along the length of a member in non-
uniform torsion, which type of torsion action predominates. Section 8.2.5.2
herein provides these details.
The intemal stresses generated in a member by uniform and by warping
torsion are described in Commentary Clause C8.5.3 and Figs. C8.5.3.1 and
€8.5.3.2 of [8.16].
Fig. 8.3
85
Uniform torsion produces a shear stress, ty, which varies through the cross
section of an open section, as shown in Fig. C8.5.3.1(b) of [8.1] and is
constant around a closed cross section, as shown in Fig. C8.5.3.1(c).
Warping torsion produces principally normal stresses due to flange bending.
‘The pattern of flange bending in an I-section is show €8.5.3.2(a) of
[8.10] and the warping normal stresses Induced are shown in Fig. 8.3 below.
These warping normal stresses are normally much larger than the
corresponding warping shear stresses, ty", shown in Fig. C8.5.3.2(b) of
[8.1b].
Tension
Compression
Warping Normal Stresses in I-Section Flanges
8.2.2.3
8.2.3
Design deformation limits
These must be limited to the same requirements as for member
deformations due to other applied forces, for example as given by
Table C2.4.1 of NZS 4203:Part 2 [8.9]. Usually the angles of twist of thin-
walled closed sections are very small and can be ignored, although section
distortions can become quite large (as discussed in more detail in [8.2]). On
the other hand, thin-walled open section members are comparatively
flexible, and special measures may be required to limit their deformations,
ot only for stiffness reasons, but also because large angles of twist may
seriously magnify secondary stresses which have been neglected in the
analysis, as covered by NZS 3404 Commentary Clause C8.5.4.2(b) and
illustrated in design example number 8.1, section 8.2.7.2 (6) herein.
Torsion on Solid Rectangular Cross Sections
‘The critical stresses due to torsion on solid cross sections are those due to
uniform torsion.
The maximum average torsion-induced shear stress on thin-walled
rectangular sections with b’t > 10 is given by equation 8.3,
woe Met (83)
Mz = — applied torque
t = member thickness
J = torsion constant = bt* / 3forb /t > 10
The stress distribution is as shown in Fig. C8.6.3.1(b) of [8.1b].
Fig. 8.4
8.6
For members with b/t<10, the torsion constant and maximum stress variation
with bit is shown in Fig. 8.4.
30 10
i 4g
& oe
iy £
2 20 4 dos 3
4 (om :
z te peyro7 3
e 3
Ev loz 8
3
O55 2 @ . e 7°
Width-thickness ratio 2/¢
Torsion Properties of Solid Rectangular Cross'Sections (from (8.2)
Fig. 8.5
Angle sections resist torsional loading by uniform torsion (refer to section
8.2.1 herein and to Commentary Clause C8.5.3.2 of [8.1b]). Thus the
maximum torsional stresses in an angle can be obtained from the above
Information with J = 5 (J for each leg). However, stress concentrations will
‘occur at the re-entrant comers. These depend on the leg thickness and root
radius and the magnitude of stress concentration can be determined from,
Fig. 8.5.
‘These stress concentrations are not a problem for static loading or low cycle
Inelastic loading but can cause fatigue failure for high cycle dynamic loading.
‘The typical Rit ratio for most rolled sections is around 1.0, hence the stress
concentration in rolled sections is not too large. More details are given in
(8.2)
29
as
Equal angle section
te crowding of
° 2 with large o7¢ rato
contours at reentrant
corner, corresponding
to stress concentration
20|
Rotio actual stress /nominol stress
bel ec omroximation
19,
gg
otis A/e
(c) Membrane contours cte-entront corner ‘(eV Inrecsed shear stresses
Stress Concentrations at Re-entrant Comers of Open Cross Sections (from [8.21)
8.2.4
8.2.4.1
8.2.4.2
a7
Torsion on Closed Thin-Walled Cross Sections
Stresses induced by torsion
Referring to Fig. 8.2 in section 8.2.1 herein, it can be seen that these types
of section also resist applied torque by uniform torsion. This is because their
torsional rigidity is so high relative to thelr warping rigidity.
The uniform torsional shear stress, which is constant across the wall
thickness, is given by equation 8.4.
My,
ee
7 2Agt 64)
where:
Mz; = applied torque
Ae area enclosed by the centreline of the hollow section
= (b-1) (d- t) for a rectangular hollow section of width, b, and
depth, d
t = wall thickness
The torsion constant is given by equ:
Chapter 8 of [8.2]
8.5 and its derivation is given in
4A?
E(b/t)
(8.5)
where:
, tare the length, thickness of the component walls around the periphery of
the section.
Equations 8.4 and 8.5 are valid only for closed sections such as tubes and
box sections, because their sections after twisting remain in the same plane,
within the practical limits of accuracy, and the torsional resistance contributed
by each part of the cross section is therefore proportional to its distance from
the centre of twist, The nature of the torsional shear stress is shown in
Fig. €8.5.3.1(c) of [8.16].
When an open-section, such as an I-section, is subjected to twisting, its
elements (flanges for example) distort and tilt out of their plane and the
above assumption is no longer valid. Unless such tilting (warping) is
restrained, the torsional resistance contributed by each part of the cross
section is independent of its position from the centre of twist. This makes
open sections substantially less rigid torsionally than box sections of the
same overall dimensions and thickness.
Analysis of closed thin-walled cross sections for torsion
Design example 8.2, section 8.2.7, covers the checking of an RHS section
for combined major axis bending and torsion and the design example should
be referred to while reading through this section.
The uniform torsion shear stress, 15, is calculated from equation 8.4 and
must be added to the design shear on the webs, in the manner given by
NZS 3404 Commentary Clause C8.5.5.2, to give the equivalent shear, V,.
‘The shear stress in the flange due to torsion, tj, also interacts with the
longitudinal (normal) flange stresses due to in-plane bending. This
8.8
interaction will seldom be critical and may be checked by a circular interaction
curve.
Finally the angle of twist occurring in the section under the applied torsion
can be obtained from Fig. 8.7.1 or 8.7.2 herein. Closed thin-walled sections
resist applied torsion through uniform torsion action, with warping torsion
being negligible. Because of this, the torsion bending constant, a, as given
by equation 8.6 and defined in section 8.2.5 (but equally applicable to
closed thin-walled sections) will be very small. Thus the ratio (L/a) will be
considerably greater than 10 and hence the appropriate value of $; can be
chosen from Figs. 8.7. The design example 8.2 herein illustrates this
clearly.
8,2.5 Torsion on I-Section, Channel and Z-Section Members
8.2.5.1 General background
Torsion on I-section members is usually a combination of uniform and
warping torsion, as described in section 8.2.1. Thus an I-section beam with
the ends constrained in the vertical plane, but flanges free to warp
(Fig. 8.1(b) herein and a common design situation) carries torsion in a non-
uniform manner, with the exact combination of uniform and warping torsion
depending on the section properties, member length, support conditions
and nature of applied torque. Thus each case must be treated separately,
and Fig. 8.7 lists the relevant information necessary for design of I-sections
under common occurrences of torsion.
Torsion on channel sections and Z-sections is also a combination of uniform
and warping torsion, until the section walls become very thin, when the
Predominant action becomes warping torsion (refer to Fig. 8.2). The method
of analysis and stress distributions covered in section 8.2.5 are equally
applicable to I-, channel or Z-sections and hence for I-section in section
8.2.5 read I-, channel or Z-section as appropriate.
For an I-section member under uniform torsion, such that flange warping is
unrestrained, the uniform shear stress distribution takes the form shown in
Fig. C8.5.3.1(b) of [8.16]
‘When warping of the flanges is prevented, the warping shear stress through
the thickness of the flange is practically constant and takes on the
distribution over the width of the flange, by, as shown in Fig. 8.6(b). Under
these conditions, each flange is subjected to a shear like that in an ordinary
rectangular beam carrying a horizontal transverse load. Unlike uniform
torsion-induced stresses, the flanges are subjected to a normal bending
stress in addition to the shear stress. This bending stress is known as the
warping normal stress, fy, and is also shown in Fig. 8.6(b). In an I-section
with the flanges prevented from warping, the warping normal and warping
shear stresses are in the same proportion as they are in a rectangular beam
under shear and bending - (ie. the normal stresses predominate).
The influence of warping torsion is at a maximum where the flanges are
restrained from warping (ie. they are rotationally restrained). This may be at a
rigid cantilever support, eg. as shown in Fig. 8.1(c) herein, or it may be at mid-
span of an I-section member with the ends prevented from twisting but the
flanges free to rotate in plan, eg. as shown in Fig. 8.1(b) herein. This latter
condition corresponds to fully restrained ends in accordance with NZS 3404
Clause 5.4.2.1, but flanges not rotationally restrained at the ends. The
deformed shape in this latter case means, however, that the flanges are
rotationally restrained at midspan, as shown in Fig. 8.1(b), where the
situation shown in Fig. 8.6(a) + (b) prevails.
warping normal srossos fy
Bimoment My
Se
we
cs Se
(©) 8imoment ond warping stresses
4
| ‘01 Rotation of
y
cross-section
Fig. 8.6
Warping Stresses and Bimoment in an I-Section Member ({rom [8.2))
In Fig, 8.6
My. = bending moment about the section minor principal y-axis of one flange
ot = distance between the flange centroids
‘Away from the point where the flanges are restrained from warping (ie. from
rotation in their own plane), the warping torsion influence decreases. The
further the cross section under consideration is away from a location of
warping restraint, the more the torsion stress distribution approaches that of
uniform stress (Fig. C8.5.3.1(b) of [8.1b]). The torsion bending constant, a,
is a parameter which indicates the length along a beam away from a position
of flange warping restraint over which the member resists the applied torsion
in a warping torsion mode. This constant is given by equation 8.6.
See (3) (a6)
The torsion bending constant, a, is combined with the span, L, into a
dimensionless parameter for design of I-sections under torsion that is given
in Figs. 8.7.1 and 8.7.2, These are taken from [8.7].
Figs. 8.7 include simple approximate expressions for the maximum flange
Moment, My, due to flange warping restraint and the maximum angle of
twist, $1, for some common cases of torsional loading. Short and long beams
are covered directly by the formulae quoted, while beams of intermediate
length require the use of coefficients which may be linearly interpolated.
‘The above information covers the various types of stresses acting on an
-, channel or Z-section in torsion. However the designer needs to know the
magnitude and location of these stresses along the beam so that they can
be combined in the correct manner with the appropriate stresses from in-
plane bending and shear. This is covered in section 8.2.5.2.
1. Cantilever
N
j= -ej-+j0
My
k2 0.040 0.287 0.566 1.000
2. Simple beam a tosts4o
a a
Nea
ou Ske
‘
ee
My:
20 25 30 35 40
0.50 0.62 0.75 0.85 0.92 0.96 1.00
oe k2 0.040 0.121 0.237 0.389 0.570 0.786 1.00
3. Continuous
‘spans equal
length equally
loaded
Ls ky 050 082 075 085 092 096 1.00
* k2 0,040 0.121 0.237 0,987 0.570 0.786 1.000
Fig. 8.7.1
Approximate flange bending moment, Miy, about y-axis of one flange and total angle of twist, @,, of beam, for
concentrated loads applied at an eccentricity, @, to the shear centre axis.
Beams are fully restrained against twist at supports,
Ne = M, (applied torque).
These details are taken from [8.7].
8.14
4, Cantilever
wrwm “{
z
job -peye 7
My % a saneMet[L] ky 024 040 ose 062 087 070
Gy este eee eee eee
ke 0014 0.092 0.214 0.979 0587 0.893
SSimpebem Lego 1osk seo Leo
— cs
wlea
Oe
w kN/m_ é Gs
we L 49 20 30 40 50 60
| oe
rr 2k, O48 017 048 018 019 0.19
wea [LP Ki 048 0.47 048 0.18 0.419 0.
sel tara (Lee OL Jee
My ey = 0.00 Lt
7 k2 0.011 0.082 0.178 0.300 0.448 0.548
Sconwom E20 aost
You might also like
- Wind Engineering 1983 3A: Proceedings of the Sixth international Conference on Wind Engineering, Gold Coast, Australia, March 21-25, And Auckland, New Zealand, April 6-7 1983; held under the auspices of the International Association for Wind EngineeringFrom EverandWind Engineering 1983 3A: Proceedings of the Sixth international Conference on Wind Engineering, Gold Coast, Australia, March 21-25, And Auckland, New Zealand, April 6-7 1983; held under the auspices of the International Association for Wind EngineeringJ.D. HolmesRating: 3 out of 5 stars3/5 (1)
- Lecture 6 Composite ColumnsDocument66 pagesLecture 6 Composite Columnsabdelrahman emad100% (1)
- Model Analysis of Plane Structures: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionFrom EverandModel Analysis of Plane Structures: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionNo ratings yet
- 07 RAPT - ExamplesDocument3 pages07 RAPT - Examplessaharui100% (2)
- Portal Frame Footings and Slab - 4ed - bk180Document12 pagesPortal Frame Footings and Slab - 4ed - bk180NivarNo ratings yet
- Concrete-Filled Double-Skin Steel Tubular Columns: Behavior and DesignFrom EverandConcrete-Filled Double-Skin Steel Tubular Columns: Behavior and DesignNo ratings yet
- As 4600 Rel NoteDocument14 pagesAs 4600 Rel NoteDiana Ho WyNo ratings yet
- The Analysis of Irregular Shaped Structures: Wood Diaphragms and Shear Walls, Second EditionFrom EverandThe Analysis of Irregular Shaped Structures: Wood Diaphragms and Shear Walls, Second EditionNo ratings yet
- Coupled Shear Wall: A ReviewDocument2 pagesCoupled Shear Wall: A ReviewIJSTE100% (1)
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- NZ ReidBar™ Design Guide 2016Document36 pagesNZ ReidBar™ Design Guide 2016jcvalenciaNo ratings yet
- Plates and Shells for Smart Structures: Classical and Advanced Theories for Modeling and AnalysisFrom EverandPlates and Shells for Smart Structures: Classical and Advanced Theories for Modeling and AnalysisRating: 5 out of 5 stars5/5 (1)
- Simple Corbel DesignDocument9 pagesSimple Corbel DesignJennifer TangNo ratings yet
- Con 1302Document12 pagesCon 1302Sanket Arun More100% (1)
- Portal Frame Practice ProblemsDocument10 pagesPortal Frame Practice ProblemsBoyzz ChinNo ratings yet
- Wood Shear Wall Design Examples For WindDocument4 pagesWood Shear Wall Design Examples For WindAbdurrahman ÇINARNo ratings yet
- Design of TrussDocument29 pagesDesign of Trussfrancis100% (1)
- Approximate Methods of AnalysisDocument59 pagesApproximate Methods of AnalysisChris EvansNo ratings yet
- Cable Supported Bridges: Concept and DesignFrom EverandCable Supported Bridges: Concept and DesignRating: 5 out of 5 stars5/5 (1)
- CIVL311 - CIVL911 - 2020 - Week1 - Student - 1 SlideDocument72 pagesCIVL311 - CIVL911 - 2020 - Week1 - Student - 1 SlideMohammad Touhidul HaqueNo ratings yet
- Analytical Solutions For Flexural Design of Hybrid Steel Fiber ReinforcedDocument14 pagesAnalytical Solutions For Flexural Design of Hybrid Steel Fiber ReinforcedNorhafizah Bt SallehNo ratings yet
- Design of RC Corbels and NibsDocument21 pagesDesign of RC Corbels and Nibsscg1998100% (2)
- Design of Steel - Concrete Composite Structures Assignment Case StudyDocument15 pagesDesign of Steel - Concrete Composite Structures Assignment Case StudySyed Ahmed KabeerNo ratings yet
- Bison Hollow Composite Floors Load Span Table PDFDocument1 pageBison Hollow Composite Floors Load Span Table PDFscegtsNo ratings yet
- Tower Design-Chapter 2-Pile Caps Design-Nada ZarrakDocument37 pagesTower Design-Chapter 2-Pile Caps Design-Nada ZarrakNadaZarrakNo ratings yet
- Brace ConfigDocument1 pageBrace ConfigmrmerajNo ratings yet
- Bolt and Weld Capacity - Red Book 1999 PDFDocument2 pagesBolt and Weld Capacity - Red Book 1999 PDFWhite_rabbit2885764No ratings yet
- PCDocument491 pagesPCVaibhav Gorad100% (2)
- LongitudinalShearReinforcementDesign C10 bk800 PDFDocument7 pagesLongitudinalShearReinforcementDesign C10 bk800 PDFBehairy AhmedNo ratings yet
- Beam Flange RestraintsDocument26 pagesBeam Flange RestraintsgparratNo ratings yet
- Torsion in Closed SectionsDocument11 pagesTorsion in Closed SectionsJason GarnerNo ratings yet
- Australian/New Zealand Standard: Cold-Formed Steel StructuresDocument8 pagesAustralian/New Zealand Standard: Cold-Formed Steel StructuresHasanSibugaNo ratings yet
- FEA Theory Problem 1Document2 pagesFEA Theory Problem 1has960No ratings yet
- Calculation Sheets NZS 3604Document5 pagesCalculation Sheets NZS 3604Sam LeungNo ratings yet
- "Hybrid" Light Steel Panel and Modular Systems PDFDocument11 pages"Hybrid" Light Steel Panel and Modular Systems PDFTito MuñozNo ratings yet
- Reinforced and Post Tensioned Rapt Software Design Workshop 1 Day PDFDocument1 pageReinforced and Post Tensioned Rapt Software Design Workshop 1 Day PDFUtsav ShrivastavaNo ratings yet
- Steel GirderDocument26 pagesSteel GirderChan Nov100% (1)
- Strand7 Roofrack AssignmentDocument17 pagesStrand7 Roofrack AssignmentJoel Forbes100% (1)
- NCCI - Design of Portal Frame Apex ConnectionsDocument9 pagesNCCI - Design of Portal Frame Apex ConnectionsAdham OunahNo ratings yet
- Wind Loading of Industrial, Mining and Petrochemical StructuresDocument16 pagesWind Loading of Industrial, Mining and Petrochemical StructuresapirakqNo ratings yet
- Steel Construction...Document35 pagesSteel Construction...Nam TranNo ratings yet
- Lateral Stability of Long Prestressed Concrete Beams - Part 2 (PCI)Document24 pagesLateral Stability of Long Prestressed Concrete Beams - Part 2 (PCI)TaiCheong LeeNo ratings yet
- Behavior of Partially Encased Slender Composite Columns in Eccentric Loading by Saima Ali, Mahbuba Begum PDFDocument10 pagesBehavior of Partially Encased Slender Composite Columns in Eccentric Loading by Saima Ali, Mahbuba Begum PDFgulilero_yoNo ratings yet
- Detailing Considerations Design Guide 7 - bk745 PDFDocument5 pagesDetailing Considerations Design Guide 7 - bk745 PDFFunkNo ratings yet
- Factors Affecting Strength of Epoxy Repaired TimberDocument15 pagesFactors Affecting Strength of Epoxy Repaired TimberJosé PeNo ratings yet
- REF33.Design of PortalFrame Buildings,,, PDFDocument358 pagesREF33.Design of PortalFrame Buildings,,, PDFharishram123456No ratings yet
- Input Data & Design Summary: Steel Stair Design Based On AISC Manual 9thDocument7 pagesInput Data & Design Summary: Steel Stair Design Based On AISC Manual 9thGonzalo Gomez CastilloNo ratings yet
- Structural Engineering VUDocument6 pagesStructural Engineering VUshan kumarNo ratings yet
- 4a. Nonlinear Structural Analysis For Seismic Design - Spring 2018 - v2Document30 pages4a. Nonlinear Structural Analysis For Seismic Design - Spring 2018 - v2Nguyen DuyNo ratings yet
- Long Term Deflection in ACI 318Document25 pagesLong Term Deflection in ACI 318Chime MornNo ratings yet
- DCB 60 To DCB 78Document534 pagesDCB 60 To DCB 78Rahel Alye100% (1)
- Seismic Design To S16-09 PDFDocument13 pagesSeismic Design To S16-09 PDFDarryn McCormickNo ratings yet
- CONCRETE 2011 Stress Block3 PDFDocument9 pagesCONCRETE 2011 Stress Block3 PDFThong NguyenNo ratings yet
- Changes in Punching Shear Design in Canadian Standard CSA A23.3-04-A Critical Review PDFDocument13 pagesChanges in Punching Shear Design in Canadian Standard CSA A23.3-04-A Critical Review PDFsuitamNo ratings yet
- Design of FlyingWall To Box CulvertDocument6 pagesDesign of FlyingWall To Box CulvertVivek PremjiNo ratings yet
- Typical Layout of Toll Plaza at KM 51+975 PDFDocument1 pageTypical Layout of Toll Plaza at KM 51+975 PDFVivek Premji100% (2)
- JL-03-November-December The Strutted Box Widening Method For Prestressed Concrete Segmental BridgesDocument18 pagesJL-03-November-December The Strutted Box Widening Method For Prestressed Concrete Segmental BridgesVivek PremjiNo ratings yet
- Efg 1Document41 pagesEfg 1Vivek PremjiNo ratings yet
- PEB StructuresDocument8 pagesPEB StructuresVivek PremjiNo ratings yet
- Chimney DesignDocument12 pagesChimney DesignVivek PremjiNo ratings yet
- BM Distribution Skewed DeckDocument4 pagesBM Distribution Skewed DeckVivek PremjiNo ratings yet
- IS 6533-Part-2:1989 Chimney Design CodeDocument28 pagesIS 6533-Part-2:1989 Chimney Design CodeVivek Premji100% (3)
- Specification of FormWork PDFDocument6 pagesSpecification of FormWork PDFVivek Premji100% (3)
- Cable Stay Bridge ModellingDocument7 pagesCable Stay Bridge ModellingVivek PremjiNo ratings yet
- Composite StructuresDocument25 pagesComposite StructuresVivek Premji100% (1)
- General Comparison Between Aisc LRFD and Asd: Hamid ZandDocument107 pagesGeneral Comparison Between Aisc LRFD and Asd: Hamid Zandadnan85% (13)
- Standard Spans of Robs1Document16 pagesStandard Spans of Robs1Vivek PremjiNo ratings yet
- Advatages of Prestress ConcreteDocument44 pagesAdvatages of Prestress ConcreteVivek PremjiNo ratings yet